晶圆承载座及其使用方法与流程
本发明涉及一种晶圆承载座及其使用方法,尤其涉及一种适用于半导体工艺的晶圆承载座及其使用方法。
背景技术:
1、在半导体工艺中,需要对晶圆进行多道工艺处理。在对晶圆进行多道工艺之前需要先将其固定于承载座上,以利于进行后续处理。然而,常见的方法是依赖人为操作将晶圆固定于承载座上,才能实现自动化作业。因此存在操作失误、或效率低等问题,造成营业损失或生产成本高昂。
技术实现思路
1、本发明的主要目的在于提供一种晶圆承载座及其使用方法,借此可自动化作业,大幅减少人为操作及失误风险,达到高生产效率。
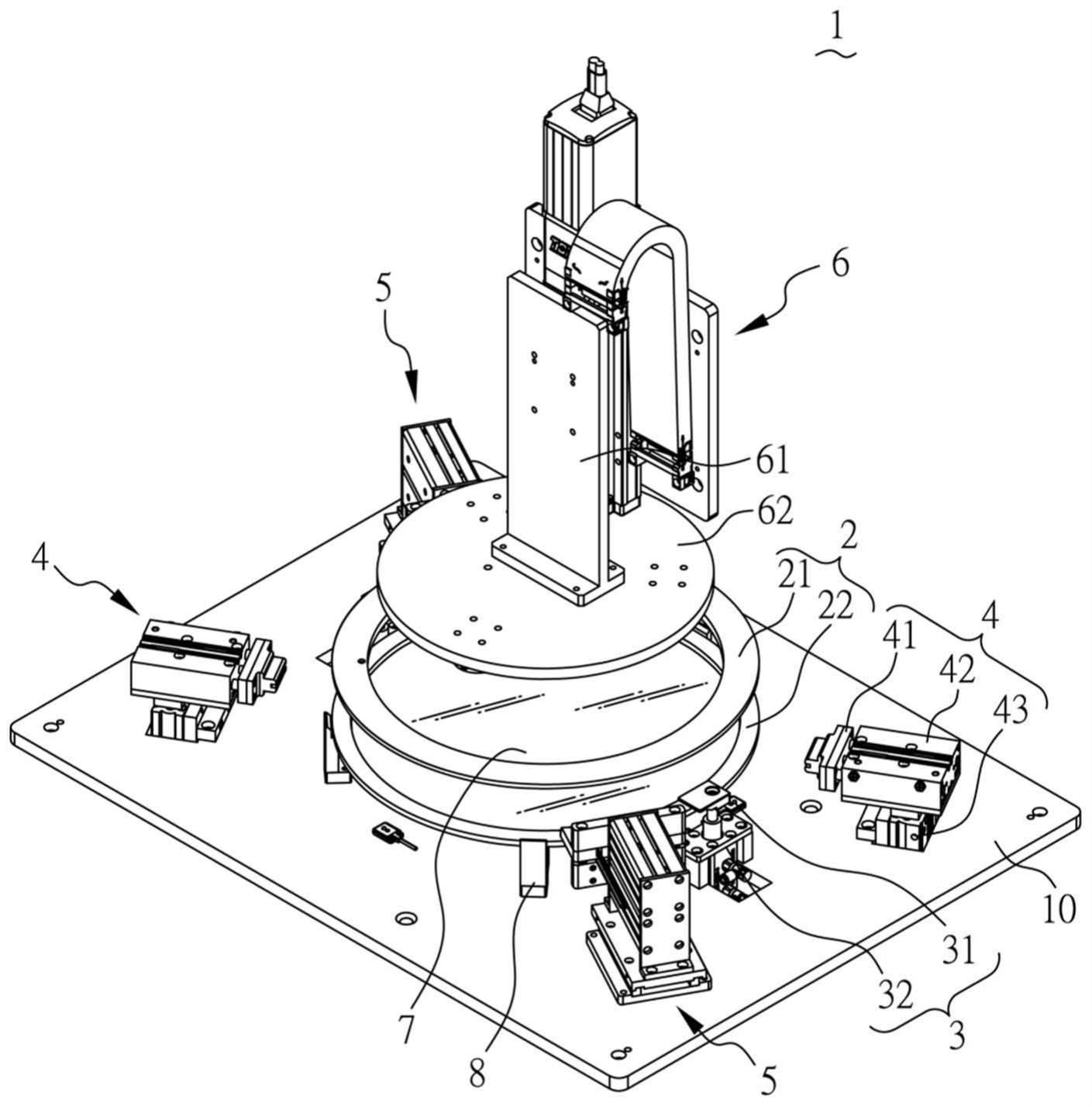
2、为达成上述目的,本发明的晶圆承载座包括承载座主体、扣合组件、夹爪组件、支撑导引组件以及吸盘组件。其中,晶圆承载座设置于载台上。承载座主体包括承载上盖以及承载下座,承载上盖与承载下座之间可对应夹持或松脱晶圆,换言之,可将晶圆夹持于承载上盖与承载下座之间。扣合组件设置于载台上,包括扣合件及扣合动力源,扣合件可对应扣合或松脱承载下座。
3、此外,夹爪组件设置于载台上,包括夹爪、夹爪水平动力源以及夹爪垂直动力源,夹爪可对应夹持或松脱承载上盖,通过夹爪水平动力源可驱动夹爪夹持或松脱承载上盖,而通过夹爪垂直动力源可使夹爪夹持的承载上盖靠近或远离承载下座,以利于将晶圆放置于承载上盖与承载下座之间。支撑导引组件包括支撑单元以及导引单元,支撑单元包括支撑座以及支撑动力源,支撑座可对应支撑或远离晶圆,通过支撑座以支撑或松脱晶圆,导引单元包括导引座以及导引动力源,导引座可对应导引或远离晶圆,通过导引座将晶圆导引定位并放置于承载下座上。吸盘组件包括驱动臂以及吸盘,吸盘可对应吸取或不吸取晶圆,在吸盘吸取晶圆时,使晶圆沿导引座定位并放置于承载下座上。
4、上述吸盘可为伯努利吸盘。
5、上述扣合动力源可为旋转缸。
6、上述夹爪水平动力源、夹爪垂直动力源、支撑动力源以及导引动力源可都为气压缸。
7、除了前述的晶圆承载座之外,本发明还提供一种晶圆承载座的使用方法,其中晶圆承载座如上所述,包括上述的承载座主体、上述的扣合组件、上述的夹爪组件、上述的支撑导引组件以及上述的吸盘组件,所以此处不再赘述。本发明的晶圆承载座的使用方法包括以下步骤:
8、(a)将承载座主体定位于载台上,并执行步骤(b);
9、(b)扣合动力源驱动扣合件,使扣合件对应扣合承载下座,用以固定承载下座,并执行步骤(c);
10、(c)夹爪水平动力源向前伸出夹爪,使夹爪对应夹持承载上盖,并执行步骤(d);
11、(d)夹爪垂直动力源向上抬升夹爪,使承载上盖远离承载下座,并执行步骤(e);
12、(e)支撑动力源向前伸出支撑座,导引动力源向前伸出导引座,并执行步骤(f);
13、(f)将晶圆放置于支撑座上,并执行步骤(g);
14、(g)驱动臂驱动吸盘下降吸取晶圆,并执行步骤(h);
15、(h)支撑动力源向后缩回支撑座,导引座维持向前伸出的状态,并执行步骤(i);
16、(i)驱动臂驱动吸盘将晶圆沿导引座下降放置于承载下座上,借此将晶圆定位于承载下座上,并执行步骤(j);
17、(j)吸盘不吸取晶圆,驱动臂驱动吸盘上升远离晶圆,导引动力源向后缩回导引座,并执行步骤(k);
18、(k)夹爪垂直动力源向下降低夹爪,使承载上盖盖合承载下座,且承载上盖与承载下座之间对应夹持晶圆,并执行步骤(l);
19、(l)夹爪水平动力源向后缩回夹爪,使夹爪对应松脱承载上盖,并执行步骤(m);以及
20、(m)扣合动力源驱动扣合件,使扣合件对应松脱承载下座,使得承载座主体夹持晶圆。
21、上述的晶圆承载座的使用方法是将晶圆放置于承载座主体上的使用方法,若是反向执行上述使用方法的步骤则可将夹持于承载座主体上的晶圆松脱。
22、借由上述的晶圆承载座及其使用方法,可自动化作业以将晶圆固定于承载座上,大幅减少人为操作及失误风险,有助于降低生产成本,达到高生产效率。
技术特征:
1.一种晶圆承载座,设置于一载台上,其特征在于,包括:
2.根据权利要求1所述的晶圆承载座,其特征在于,该吸盘为伯努利吸盘。
3.根据权利要求1所述的晶圆承载座,其特征在于,该扣合动力源为旋转缸。
4.根据权利要求1所述的晶圆承载座,其特征在于,该夹爪水平动力源、该夹爪垂直动力源、该支撑动力源以及该导引动力源都为气压缸。
5.一种晶圆承载座的使用方法,该晶圆承载座,设置于一载台上,包括有承载座主体、扣合组件、夹爪组件以及支撑导引组件;该承载座主体包括承载上盖以及承载下座,该承载上盖与该承载下座之间可对应夹持或松脱晶圆;该扣合组件设置于该载台上,包括扣合件及扣合动力源,该扣合件可对应扣合或松脱该承载下座;该夹爪组件设置于该载台上,包括夹爪、夹爪水平动力源以及夹爪垂直动力源,该夹爪可对应夹持或松脱该承载上盖;该支撑导引组件,包括支撑单元以及导引单元,该支撑单元包括支撑座以及支撑动力源,该支撑座可对应支撑或远离该晶圆,该导引单元包括导引座以及导引动力源,该导引座可对应导引或远离该晶圆;该吸盘组件包括驱动臂以及吸盘,该吸盘可对应吸取或不吸取该晶圆;其特征在于,该晶圆承载座的使用方法包括下列步骤:
技术总结
本发明提供了一种晶圆承载座及其使用方法,其中晶圆承载座设置于载台上,包括承载座主体、扣合组件、夹爪组件、支撑导引组件以及吸盘组件。该承载座主体包括承载上盖以及承载下座。该扣合组件设置于该载台上,包括扣合件及扣合动力源。该夹爪组件设置于该载台上,包括夹爪、夹爪水平动力源以及夹爪垂直动力源。该支撑导引组件包括支撑单元以及导引单元。该吸盘组件包括驱动臂以及吸盘。借此,本发明的晶圆承载座可以自动化作业,达到高生产效率。
技术研发人员:吴俊贤,彭成斌,柯宏坤
受保护的技术使用者:台湾富创得工程股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!