键合装置及键合方法与流程
1.本发明涉及半导体领域,特别涉及一种键合装置及键合方法。
背景技术:
2.目前,芯片与晶圆的键合工艺中,需要把单个芯片键合在另外一个完整的晶圆上,此工艺中急需解决的问题是键合产能问题。其中,芯片拾取速度已经很高(例如可达100ms/颗),因此,产能提高瓶颈主要在键合头的移动时间以及键合过程中每个芯片的对准时间和键合时间。
3.目前具有两种键合装置:
4.在其中一种键合装置中,键合头从芯片拾取机构上吸附芯片之后,会沿着导轨运动,直至运动到晶圆上方后,将芯片与晶圆键合,在整个过程中,晶圆保持不动。但是,键合头在导轨上的运动行程太长,导致无法达到设计的对准精度;且若键合头上集成了用于对准的高倍清晰镜头,由于高倍清晰镜头的体积和重量均比较大,通过键合头在水平向移动实现对准时,导致键合头移动后停止时的惯性大,从而导致键合头停下的位置不准确,进而导致键合头上的芯片无法与晶圆上的待键合位置对准,对准精度进一步降低。
5.与上述键合装置相比,在另一种键合装置中,设计了悬臂转盘结构用于将芯片传送给键合头,且缩短了导轨的长度,但是,键合头仍然需要沿水平向运动,在键合头上集成了高倍清晰镜头之后,仍然会导致键合头上的芯片无法与晶圆上的待键合位置对准。
6.并且,上述两种键合装置中,每次芯片与晶圆键合之前都需要对准,导致键合效率低下,键合产能低。因此,需要对键合装置进行改进,以解决上述的至少一个问题。
技术实现要素:
7.本发明的目的在于提供一种键合装置及键合方法,使得在提高第一待键合体与第二待键合体的对准精度的同时,还能提高键合产能。
8.为实现上述目的,本发明提供了一种键合装置,包括可水平向移动的第一承载台和第二承载台,所述键合装置包括:
9.拾取机构,可垂向移动地设置于所述第一承载台的上方,所述拾取机构包括拾取部和翻转部,所述拾取部设置于所述翻转部的两端,所述拾取部用于从所述第一承载台上拾取第一待键合体,所述翻转部用于将拾取的所述第一待键合体从第一面向上翻转为第二面向上;
10.传送机构,包括传送部和键合头下部,所述键合头下部可分离地设置于所述传送部上,以用于吸附翻转后的所述第一待键合体;
11.键合机构,可垂向移动地设置于所述第二承载台的上方,所述键合机构包括键合头上部,用于与所述键合头下部可分离地连接;所述传送部用于使得吸附有所述第一待键合体的所述键合头下部移动到所述键合头上部与所述第二承载台之间,进而在所述键合头上部与所述键合头下部连接之后,通过所述第二承载台在水平向的移动使得所述第一待键
合体与所述第二承载台上的第二待键合体对准,所述键合头上部带动吸附有所述第一待键合体的所述键合头下部沿垂向移动,以将所述第一待键合体键合于所述第二待键合体上。
12.可选地,所述键合头上部在水平向位移为0,所述第二承载台在垂向位移为0。
13.可选地,所述键合头上部上集成有第二对准系统,所述第二对准系统用于在所述键合头上部与所述键合头下部连接之后,识别所述键合头下部吸附的所述第一待键合体与所述键合头上部上的固定基准点之间的水平距离,以在将所述第一待键合体键合于所述第二待键合体上时补偿所述第一待键合体与所述第二待键合体之间的偏差。
14.可选地,所述拾取机构上集成有第一对准系统,所述第一对准系统用于通过所述第一承载台在水平向的移动使得所述第一待键合体和所述拾取机构对准。
15.可选地,所述第二对准系统的分辨率大于所述第一对准系统的分辨率。
16.可选地,所述第二承载台的移动精度大于所述第一承载台的移动精度。
17.可选地,所述第一面为所述第一待键合体的正面,所述第二面为所述第一待键合体的背面。
18.可选地,所述拾取部和/或所述键合头下部为伯努利吸嘴或真空吸嘴。
19.可选地,所述键合头下部与所述传送部之间真空吸附或磁力吸附,以使得所述键合头下部可分离地设置于所述传送部上;和/或,所述键合头上部与所述键合头下部之间真空吸附或者磁力吸附,以使得所述键合头上部与所述键合头下部之间可分离地连接。
20.本发明还提供一种键合方法,采用所述的键合装置将第一待键合体键合于第二待键合体上,所述键合方法包括:
21.采用所述拾取部从所述第一承载台上拾取所述第一待键合体;
22.采用所述翻转部将拾取的所述第一待键合体从第一面向上翻转为第二面向上;
23.采用所述键合头下部吸附翻转后的所述第一待键合体;
24.采用所述传送部将吸附有所述第一待键合体的所述键合头下部移动到所述键合头上部与所述第二承载台之间;
25.将所述键合头上部沿垂向移动,以使得所述键合头上部与所述键合头下部连接后,所述键合头下部与所述传送部分离,并通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二待键合体对准,所述键合头上部带动吸附有所述第一待键合体的所述键合头下部沿垂向移动以将所述第一待键合体键合于所述第二待键合体上。
26.可选地,在所述键合头上部与所述键合头下部连接之后,所述键合方法还包括:
27.采用所述键合头上部集成的第二对准系统识别所述键合头下部吸附的所述第一待键合体与所述键合头上部上的固定基准点之间的水平距离,以在将所述第一待键合体键合于所述第二待键合体上时补偿所述第一待键合体与所述第二待键合体之间的偏差。
28.可选地,在所述键合头上部与所述键合头下部连接之后,所述键合方法还包括:
29.以所述第二待键合体的圆心为原点建立坐标系;
30.采用所述第二对准系统识别所述第二待键合体上的对准标识,并计算所述第二待键合体上的实际待键合位置与所述坐标系中的理论待键合位置之间的偏差,以在将所述第一待键合体键合于所述第二待键合体上时补偿所述第一待键合体与所述第二待键合体上的实际待键合位置之间的偏差。
31.可选地,在将所述第一待键合体键合于所述第二待键合体上之后,所述键合头上
部带动所述键合头下部沿远离所述第二待键合体的方向垂向移动,所述键合头下部与所述传送部连接后,所述键合头上部与所述键合头下部分离。
32.与现有技术相比,本发明的技术方案具有以下有益效果:
33.1、本发明的键合装置,包括拾取机构、传送机构和键合机构,所述拾取机构包括拾取部和翻转部,所述传送机构包括传送部和键合头下部,所述键合机构包括键合头上部,通过所述拾取部从第一承载台上拾取第一待键合体,通过所述翻转部将拾取的所述第一待键合体从第一面向上翻转为第二面向上,通过所述键合头下部吸附翻转后的所述第一待键合体,并通过所述传送部将吸附有所述第一待键合体的所述键合头下部移动到所述键合头上部与所述第二承载台,进而在所述键合头上部与所述键合头下部连接之后,通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二承载台上的第二待键合体对准,所述键合头上部带动吸附有所述第一待键合体的所述键合头下部沿垂向移动,以将所述第一待键合体键合于所述第二待键合体上。由于将用于吸附翻转后的所述第一待键合体的所述键合头下部与所述键合头上部可分离地连接,且通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二待键合体对准,所述键合头上部在水平向上的位移为0,使得所述键合头上部上能够集成体积和重量均比较大的高倍清晰镜头的同时,也不会对所述键合头上部产生影响,进而使得所述第一待键合体与所述第二待键合体的对准精度得到提高。
34.2、本发明的键合方法,采用所述的键合装置将第一待键合体键合于第二待键合体上,具体包括:采用所述拾取部从所述第一承载台上拾取所述第一待键合体;采用所述翻转部将拾取的所述第一待键合体从第一面向上翻转为第二面向上;采用所述键合头下部吸附翻转后的所述第一待键合体;采用所述传送部将吸附有所述第一待键合体的所述键合头下部移动到所述键合头上部与所述第二承载台之间;将所述键合头上部沿垂向移动,以使得所述键合头上部与所述键合头下部连接后,所述键合头下部与所述传送部分离,并通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二待键合体对准,所述键合头上部带动吸附有所述第一待键合体的所述键合头下部沿垂向移动,以将所述第一待键合体键合于所述第二待键合体上。由于将用于吸附翻转后的所述第一待键合体的所述键合头下部与所述键合头上部可分离地连接,且通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二待键合体对准,所述键合头上部在水平向上的位移为0,使得所述键合头上部上能够集成体积和重量均比较大的高倍清晰镜头的同时,也不会对所述键合头上部产生影响,进而使得所述第一待键合体与所述第二待键合体的对准精度得到提高。
附图说明
35.图1是一种键合装置的正视示意图;
36.图2是另一种键合装置的正视示意图;
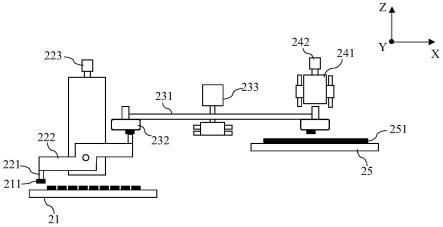
37.图3是本发明一实施例的键合装置的正视示意图;
38.图4是图3所示的键合装置中的芯片传送机构的俯视示意图;
39.图5是本发明一实施例的键合方法的流程图。
40.其中,附图1~图5的附图标记说明如下:
41.11-第一承载台;111-芯片;12-芯片拾取机构;13-第二承载台;131-晶圆;14-键合
头;15-导轨;16-第一悬臂转盘结构;17-第二悬臂转盘结构;21-第一承载台;211-芯片;221-拾取部;222-翻转部;223-第一对准系统;231-辐条;232-键合头下部;233-驱动轴;234-固定环;241-键合头上部;242-第二对准系统;25-第二承载台;251-晶圆。
具体实施方式
42.现有的两种键合装置参阅图1和图2:
43.在图1所示的键合装置中,芯片拾取机构12先将芯片111从第一承载台11上拾起并翻转,键合头14吸附翻转后的芯片111,再通过键合头14在导轨15上沿水平向移动,使得键合头14带着芯片111移动到第二承载台13上的晶圆131上方后进行键合,在上述过程中第二承载台13保持不动。其中,键合头14在导轨15上的运动行程长达700mm以上,导致无法达到设计的对准精度小于200nm;并且,若键合头14上集成了用于对准的高倍清晰镜头,由于高倍清晰镜头的体积和重量均比较大,通过键合头14在水平向移动实现对准时,导致键合头14沿水平向移动后停止时的惯性大,从而导致键合头14停下的位置不准确,进而导致键合头14上的芯片111无法与晶圆131上的待键合位置对准,对准精度进一步降低。
44.与图1所示的键合装置相比,在图2所示的键合装置中,增加了第一悬臂转盘结构16和第二悬臂转盘结构17,且缩短了导轨15的长度,使得键合头14在导轨15上的运动行程缩短到300mm;其中,在芯片拾取机构12拾起并翻转芯片111后,通过第一悬臂转盘结构16和第二悬臂转盘结构17将翻转后的芯片111传送到键合头14上,再通过键合头14在导轨15上沿水平向移动,使得键合头14带着芯片111移动到第二承载台13上的晶圆131上方后进行键合,在上述过程中第二承载台13保持不动。在图2所示的键合装置中,虽然键合头14的运动行程缩短了,但是键合头14仍然是沿水平向运动的,在键合头14上集成了高倍清晰镜头之后,仍然会导致键合头14上的芯片111无法与晶圆131上的待键合位置对准;并且,若芯片拾取机构12拾取芯片111时与芯片111的正面接触,则在芯片111的传送过程中,第一悬臂转盘结构16与芯片111的背面接触,第二悬臂转盘结构17与芯片111的正面接触,键合头14与芯片111的背面接触,导致芯片111的正面被接触的次数增多,进而导致对芯片111正面的缺陷控制带来困难。
45.并且,在图1和图2所示的键合装置中,每次芯片111与晶圆131键合之前都需要对准,导致键合效率低下,键合产能低。
46.因此,本发明提供了键合装置及键合方法,以在提高芯片与晶圆的对准精度的同时,还能提高键合产能。
47.为使本发明的目的、优点和特征更加清楚,以下对本发明提出的键合装置及键合方法作进一步详细说明。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
48.本发明一实施例提供一种键合装置,包括可水平向移动的第一承载台和第二承载台,所述键合装置包括:拾取机构,可垂向移动地设置于所述第一承载台的上方,所述拾取机构包括拾取部和翻转部,所述拾取部设置于所述翻转部的两端,所述拾取部用于从所述第一承载台上拾取第一待键合体,所述翻转部用于将拾取的所述第一待键合体从第一面向上翻转为第二面向上;传送机构,包括传送部和键合头下部,所述键合头下部可分离地设置于所述传送部上,以用于吸附翻转后的所述第一待键合体;键合机构,可垂向移动地设置于
所述第二承载台的上方,所述键合机构包括键合头上部,用于与所述键合头下部可分离地连接;所述传送部用于使得吸附有所述第一待键合体的所述键合头下部移动到所述键合头上部与所述第二承载台之间,进而在所述键合头上部与所述键合头下部连接之后,通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二承载台上的第二待键合体对准,所述键合头上部带动吸附有所述第一待键合体的所述键合头下部沿垂向移动,以将所述第一待键合体键合于所述第二待键合体上。
49.下面参阅图3~图4更为详细的介绍本实施例提供的键合装置。并且,建立垂直坐标系,下面内容中的水平向移动是指在水平面的x方向和y方向移动,x方向垂直于y方向,垂向移动是指在z方向移动。
50.所述键合装置能够用于芯片与晶圆键合、晶圆与晶圆键合或者芯片与芯片键合,或者也可以用于其他类型的载片之间的键合(例如芯片与玻璃键合),在此不做限制。
51.优选的,所述键合装置用于将芯片键合于晶圆上,芯片位于第一承载台上,晶圆位于第二承载台上,即所述第一待键合体为芯片,所述第二待键合体为晶圆。
52.下面以将第一承载台21上的芯片211键合于第二承载台25上的晶圆251上为例对所述键合装置进行说明。
53.多个所述芯片211位于第一承载台21上,所述第一承载台21可水平向移动,所述拾取机构可垂向移动地设置于所述第一承载台21的上方。通过所述第一承载台21在水平向的移动以及所述拾取机构的垂向移动,使得能够依次实现对所有的所述芯片211的拾取和翻转。
54.其中,可以将切割一晶圆(未图示)获得的多个芯片211放置于蓝膜(未图示)上,并采用机械臂(未图示)将放置有多个芯片211的蓝膜放置并固定于所述第一承载台21上。
55.优选的,所述拾取机构上集成有第一对准系统223,机械臂与所述第一对准系统223信号连接;在采用机械臂将放置有多个芯片211的蓝膜放置于所述第一承载台21上之前,先采用所述第一对准系统223识别所述第一承载台21上的对准标识,以使得所述蓝膜和所述芯片211能够与所述第一承载台21对准,确保所述蓝膜能够准确地放置于所述第一承载台21上的设定位置。并且,由于在切割一晶圆后,各个所述芯片211在所述蓝膜上的位置坐标已知,那么,在所述蓝膜放置于所述第一承载台21上的设定位置后,各个所述芯片211也会各自位于所述第一承载台21上对应的设定位置,即各个所述芯片211在所述第一承载台21上的位置也已知。
56.所述拾取机构包括拾取部221和翻转部222,所述拾取部221设置于所述翻转部222的两端,所述拾取部221用于从所述第一承载台21上的蓝膜上拾取所述芯片211,所述翻转部222用于将拾取的所述芯片211从第一面向上翻转为第二面向上。
57.优选的,在采用所述拾取部221拾取所述芯片211之前,先采用所述第一对准系统223识别所述第一承载台21上的对准标识,以使得所述拾取机构与所述第一承载台21对准。
58.由于所述芯片211与所述第一承载台21对准且所述拾取机构与所述第一承载台21对准,使得所述芯片211与所述拾取机构对准,从而使得所述拾取部221能够准确拾取所述蓝膜上的每个所述芯片211。
59.所述第一承载台21和所述拾取机构均能在水平向和垂向移动。优选的,在上述实现所述蓝膜和所述芯片211与所述第一承载台21对准以及实现所述拾取机构与所述第一承
载台21对准的过程中,所述拾取机构在水平向位移为0,所述第一承载台21在垂向位移为0,仅通过所述第一承载台21在水平向移动实现所述芯片211与所述拾取机构的对准。
60.所述翻转部222可以有一个或者至少两个。当所述翻转部222只有一个时,所述翻转部222的中心固定在所述拾取机构上,并且,当位于所述翻转部222一端的拾取部221的拾取面向下时,位于所述翻转部222另一端的拾取部221的拾取面向上;并且,在翻转所述芯片211之后,位于所述翻转部222所述一端的拾取部221的拾取面翻转为向上,位于所述翻转部222所述另一端的拾取部221的拾取面翻转为向下。当所述翻转部222为至少两个时,每个所述翻转部222的中心均固定在所述拾取机构上,多个所述翻转部222的中心可以重合也可以不重合,多个所述翻转部222的中心重合时呈风车状交替拾取、并翻转所述芯片211。
61.在所述芯片211与所述拾取机构对准之后,所述拾取机构对所述芯片211拾取和翻转的步骤可以包括:首先,水平移动所述第一承载台21,以将待拾取的所述芯片211对准拾取面向下的所述拾取部221;然后,将所述拾取机构沿垂向下移,以使得所述拾取部221拾取所述芯片211;然后,将所述拾取机构沿垂向上移,且所述翻转部222带动拾取有所述芯片211的所述拾取部221在垂直面旋转,使得拾取的所述芯片211从第一面向上翻转为第二面向上,并在翻转后,所述翻转部222在水平面旋转,以带动拾取有所述芯片211的所述拾取部221旋转至后续与键合头下部232相对的位置。并且,在上述步骤之后,所述翻转部222继续在垂直面旋转带动拾取面向上的所述拾取部221(此时,此拾取面向上的所述拾取部221上的芯片211被后续的键合头下部232拾取走)翻转为拾取面向下,且将其旋转至被拾取走的所述芯片211在所述第一承载台21上所在的位置,以使得在所述第一承载台21通过水平向的移动将后续待拾取的所述芯片211移动到此位置之后,重复上述步骤,直至完成对所述第一承载台21上的所有芯片211的拾取。
62.另外,所述第一面可以为所述芯片211的正面,所述第二面为所述芯片211的背面,所述芯片211的正面形成有各种器件结构,所述芯片211的背面为衬底,所述第一面和所述第二面为相对的面。需要说明的是,在其他实施例中,所述第一面也可以为所述芯片211的背面,所述第二面为所述芯片211的正面。
63.所述拾取部221可以为伯努利吸嘴或真空吸嘴。其中,伯努利吸嘴利用压缩空气通过小孔产生高速射流,高速射流带走周围气体,从而产生负压来吸附芯片211,伯努利吸嘴对所述芯片211是非接触式的吸附;真空吸嘴是利用抽真空装置进行抽吸,使得真空吸嘴内产生负气压来吸附所述芯片211,真空吸嘴对所述芯片211是接触式的吸附。因此,当所述第一面为所述芯片211的正面时,优选所述拾取部221为伯努利吸嘴,以避免所述拾取部221拾取所述芯片211时与所述芯片211的正面接触,从而避免在所述芯片211的正面产生颗粒污染等缺陷。
64.所述传送机构包括传送部和键合头下部232,所述键合头下部232可分离地设置于传送部上,所述键合头下部232用于吸附翻转后的所述芯片211,所述传送部用于使得吸附有所述芯片211的所述键合头下部232移动到所述键合机构中的键合头上部241与所述第二承载台25之间。
65.优选的,所述传送部包括至少一个辐条231,所述键合头下部232可分离地设置于每个所述辐条231的两端,所述辐条231可在水平面或者垂直面旋转,以带动吸附有所述芯片211的所述键合头下部232旋转到所述键合机构中的键合头上部241与所述第二承载台25
之间。需要说明的是,在其他实施例中,所述传送部还可以为导轨(未图示),所述键合头下部232通过在导轨上移动,使得吸附有所述芯片211的所述键合头下部232移动到键合头上部241与第二承载台25之间。无论采用哪种方式使得吸附有所述芯片211的所述键合头下部232移到所述键合机构中的键合头上部241与所述第二承载台25之间,所述键合头下部232与后续的所述键合头上部241接触之前均可以移动所述键合头下部232以调整所述键合头下部232与所述键合头上部241之间的相对关系。
66.优选的,所述键合头下部232为真空吸嘴,所述键合头下部232真空吸附所述芯片211,即所述键合头下部232对所述芯片211为接触式的吸附,以使得在后续所述芯片211与晶圆251键合时,键合头上部241向下施加的力能够通过所述键合头下部232施加给所述芯片211,进而使得能够顺利完成键合。在其他实施例中,所述键合头下部232也可以为伯努利吸嘴。
67.并且,若所述键合头下部232对所述芯片211为接触式的吸附,则优选所述第一面为所述芯片211的正面,所述第二面为所述芯片211的背面,以使得所述键合头下部232与所述芯片211的背面接触,避免所述键合头下部232与所述芯片211的正面接触而导致所述芯片211的正面产生颗粒污染等缺陷。
68.并且,当所述传送部包括至少一个辐条231时,所述传送部还可包括驱动轴233和固定环234,所述辐条231的两端与所述固定环234连接,且所述辐条231经过所述固定环234的中心,所述固定环234用于稳定所述辐条231,避免所述辐条231变形;所述驱动轴233垂向设置于所述辐条231的中心,以驱动所述辐条231在水平面或者垂直面旋转。
69.并且,当所述传送部包括至少一个辐条231时,为了提高效率,所述传送部可以包括至少两个沿所述固定环234的径向分布的辐条231,此时,所有的所述辐条231的中心相交连接,所有的所述辐条231的中心相交于所述驱动轴233,以使得所述驱动轴233驱动所有的所述辐条231在水平面或者垂直面旋转,进而带动所有的所述键合头下部232旋转,以不断更替用于从所述拾取部221上吸附所述芯片211的键合头下部232以及用于与所述键合头上部241连接的键合头下部232。
70.并且,所述键合头下部232与所述传送部之间可以通过真空吸附或磁力吸附,以使得所述键合头下部232可分离地设置于所述传送部上。其中,所述键合头下部232与所述传送部中的一个或两个部件上可以设置有用于实现二者之间真空吸附的部件(例如真空管路和吸盘等)和用于实现二者之间磁力吸附的部件(例如电磁铁等)。
71.所述键合机构可垂向移动地设置于所述第二承载台25的上方,所述键合机构中的键合头上部241用于与所述键合头下部232可分离地连接。
72.所述键合头上部241与所述键合头下部232之间可以通过真空吸附或者磁力吸附,以使得所述键合头上部241与所述键合头下部232之间可分离地连接。其中,所述键合头上部241和所述键合头下部232中的一个或两个部件上可以设置有用于实现二者之间真空吸附的部件(例如真空管路和吸盘等)和用于实现二者之间磁力吸附的部件(例如电磁铁等)。
73.在吸附有所述芯片211的所述键合头下部232移动到所述键合头上部241与所述第二承载台25之间之后,将所述芯片211键合于位于第二承载台25上的所述晶圆251上的步骤包括:首先,将所述键合头上部241沿垂向下移,直至所述键合头上部241与所述键合头下部232接触后连接,连接后,所述键合头下部232与所述传送部之间分离;然后,所述键合头上
部241带动吸附有所述芯片211的所述键合头下部232继续沿垂向下移,直至所述芯片211与所述晶圆251接触后,继续向下施力将所述芯片211键合于所述晶圆251上。
74.并且,在将所述芯片211键合于所述晶圆251上之后,所述键合头上部241带动所述键合头下部232沿远离所述晶圆251的方向移动,所述键合头下部232与所述传送部接触后连接,连接后,所述键合头上部241与所述键合头下部232分离;然后,所述传送部将位于所述键合头上部241与所述第二承载台25之间的所述键合头下部232移走,使得所述键合头下部232继续从所述拾取机构上吸附翻转后的芯片211。其中,若所述传送部包括至少两个辐条231,则在所述键合头上部241与所述键合头下部232分离之后,各个所述辐条231在水平面或者垂直面旋转,带动位于所述键合头上部241与所述第二承载台25之间的所述键合头下部232离开,并将另一个吸附有所述芯片211的所述键合头下部232旋转到所述键合头上部241与所述第二承载台25之间,以继续执行上述将所述芯片211键合于所述晶圆251上的步骤,使得效率得到明显提高。
75.并且,在更换位于所述键合头上部241与所述第二承载台25之间的键合头下部232的过程中,也将所述第二承载台25沿水平向移动,以将所述晶圆251上的下一待键合位置移动到与更换后的所述芯片211对准的位置。因此,通过所述第二承载台25在水平向的移动、所述传送部的传送以及所述键合头上部241的垂向移动,使得能够依次实现对所有的所述芯片211键合于所述晶圆251上。
76.并且,当所述传送部包括至少一个辐条231时,位于同一所述辐条231两端的两个所述键合头下部232中,当其中一个键合头下部232位于所述键合头上部241与所述第二承载台25之间时,另一个键合头下部232正位于拾取面向上的所述拾取部221的上方。因此,位于同一所述辐条231两端的两个所述键合头下部232需要分别与吸附有所述芯片211的拾取部221和所述键合头上部241对准,确保这两个所述键合头下部232每次停在可接受的范围内;并且,若从所述拾取机构拾取和翻转所述芯片211至所述其中一个键合头下部232吸附所述芯片211所需的时间为第一时间,从所述键合头上部241与所述另一个键合头下部232连接、所述另一个键合头下部232上的芯片211与所述晶圆251键合至所述键合头上部241与所述另一个键合头下部232分离所需的时间为第二时间,那么,通过减小第一时间和第二时间的差异,即可使得整个过程中没有等待时间,以达到最优效率。
77.并且,所述辐条231的个数越多,则更换位于所述键合头上部241与所述第二承载台25之间的键合头下部232所需的时间越少,例如所述辐条231的个数可以小于100,
78.另外,若所述第一面为所述芯片211的正面,所述第二面为所述芯片211的背面,则所述芯片211的正面与所述晶圆251键合;若所述第一面为所述芯片211的背面,所述第二面为所述芯片211的正面,则所述芯片211的背面与所述晶圆251键合。
79.并且,为了使得所述芯片211在所述晶圆251上的键合位置更加准确,所述第二承载台25的移动精度大于所述第一承载台21的移动精度,所述第二承载台25为高精度的承载台,使得所述芯片211与所述晶圆251的键合精度达到纳米级。
80.并且,可以采用机械臂将所述晶圆251放置于所述第二承载台25上。
81.并且,优选的,所述键合头上部241上集成有第二对准系统242,机械臂与所述第二对准系统242信号连接;在采用机械臂将所述晶圆251放置于所述第二承载台25上之前,先采用所述第二对准系统242识别所述第二承载台25上的对准标识,以使得所述晶圆251与所
述第二承载台25对准,确保所述晶圆251能够准确地放置于所述第二承载台25上的设定位置。
82.并且,优选的,采用所述第二对准系统242识别所述第二承载台25上的对准标识,使得所述键合头上部241与所述第二承载台25对准。
83.由于所述晶圆251与所述第二承载台25对准且所述键合头上部241与所述第二承载台25对准,使得所述晶圆251与所述键合头上部241对准,避免所述键合头上部241与所述晶圆251出现对准偏差。
84.另外,由于每次所述键合头下部232从所述拾取部221上吸附所述芯片211时,所述芯片211在所述键合头下部232的底面的位置不固定,且每次所述键合头下部232吸附在所述键合头上部241上的位置不固定,所述传送部对所述键合头下部232的运送也会导致所述键合头下部232的位置出现偏差,所以,在所述键合头上部241与所述键合头下部232连接之后,通过所述第二承载台25在水平向的移动使得所述芯片211与所述晶圆251对准,具体地,可以通过所述第二对准系统242识别所述键合头下部232吸附的所述芯片211与所述键合头上部241上的固定基准点之间的水平距离,以在将所述芯片211键合于所述晶圆251上时补偿所述芯片211与所述晶圆251之间的偏差,使得所述芯片211在所述晶圆251上的键合位置的准确性得到提高。
85.其中,识别所述键合头下部232吸附的所述芯片211与所述键合头上部241上的固定基准点之间的水平距离的方法包括但不限于:在所述键合头下部232的底面设置刻度标记,并在所述第二承载台25的外围设置至少一反射镜(未图示),采用反射镜将所述芯片211位于所述键合头下部232底面处对应的刻度标记信息反射给所述第二对准系统242,进而根据刻度标记信息确认所述芯片211与所述固定基准点之间的水平距离。
86.并且,由于所述键合头上部241与所述晶圆251是对准的,那么,所述固定基准点与所述晶圆251也是对准的,因此,所述固定基准点可以为所述键合头上部241上的任一位置。
87.所述第二承载台25和所述键合头上部241均能在水平向和垂向移动。优选的,在上述实现所述晶圆251与所述键合头上部241对准以及实现所述芯片211与所述晶圆251对准的过程中,所述键合头上部241在水平向位移为0,所述第二承载台25在垂向位移为0,仅通过所述第二承载台25在水平向移动来实现。
88.因此,本发明在所述传送部与所述键合头下部232可分离地连接以及所述键合头上部241与所述键合头下部232可分离地连接的基础上,通过所述第二承载台25在水平向移动实现所述芯片211与所述晶圆251对准以及通过所述键合头上部241垂向移动实现所述芯片211键合于所述晶圆251上,使得能够避免所述键合头上部241水平移动发生惯性而产生水平偏差,从而能够减小所述芯片211与所述晶圆251的对准偏差。
89.并且,优选的,所述第二对准系统242的分辨率大于所述第一对准系统223的分辨率,所述第二对准系统242具有高倍清晰镜头。虽然高倍清晰镜头的体积和重量均比较大,但是,由于是通过所述第二承载台25在水平向移动实现所述芯片211与所述晶圆251对准,而所述键合头上部241在水平向位移为0,从而能够避免集成高倍清晰镜头对对准精度产生影响,进而能够避免所述芯片211与所述晶圆251上的待键合位置之间的对准精度降低。
90.另外,优选的,在所述键合头上部241与所述键合头下部232连接之后,还可以以所述晶圆251的圆心为原点建立坐标系,再采用所述第二对准系统242识别所述晶圆251上的
多个对准标识,读取各个对准标识在所述晶圆251上的实际位置与在所述坐标系中的理论位置,并计算实际位置与理论位置之间的偏差,接着根据此偏差拟合出所述晶圆251上的各个实际待键合位置与所述坐标系中对应的各个理论待键合位置之间的偏差,以在将所述芯片211键合于所述晶圆251上时补偿所述芯片211与所述晶圆251上的实际待键合位置之间的偏差,进而使得所述芯片211在所述晶圆251上的键合位置的准确性得到进一步提高。
91.其中,实际位置与理论位置之间的偏差包含:在水平向(即x方向和y方向)的移动偏差以及旋转偏差等。
92.综上所述,本发明提供的键合装置,包括拾取机构、传送机构和键合机构,所述拾取机构包括拾取部和翻转部,所述传送机构包括传送部和键合头下部,所述键合机构包括键合头上部,通过所述拾取部从第一承载台上拾取第一待键合体,通过所述翻转部将拾取的所述第一待键合体从第一面向上翻转为第二面向上,通过所述键合头下部吸附翻转后的所述第一待键合体,并通过所述传送部将吸附有所述第一待键合体的所述键合头下部移动到所述键合头上部与所述第二承载台,进而在所述键合头上部与所述键合头下部连接之后,通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二承载台上的第二待键合体对准,所述键合头上部带动吸附有所述第一待键合体的所述键合头下部沿垂向移动,以将所述第一待键合体键合于所述第二待键合体上。由于将用于吸附翻转后的所述第一待键合体的所述键合头下部与所述键合头上部可分离地连接,且通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二待键合体对准,所述键合头上部在水平向上的位移为0,使得所述键合头上部上能够集成体积和重量均比较大的高倍清晰镜头的同时,也不会对所述键合头上部产生影响,进而使得所述第一待键合体与所述第二待键合体的对准精度得到提高(例如,芯片与晶圆的对准精度可达到200nm以内)。
93.进一步的,在每次将所述第一待键合体键合于所述第二待键合体上之前,只需采用所述键合头上部上集成的所述第二对准系统识别所述键合头下部吸附的所述第一待键合体与所述键合头上部上的固定基准点之间的水平距离,无需每次识别所述第一待键合体与所述第二待键合体之间的相对位置。其中,由于前者所述第二对准系统只需识别所述第一待键合体在所述键合头下部底面的一个位置点,并将此位置点与固定基准点之间的水平距离进行计算即可,速度很快;而后者需要在所述第一待键合体和所述第二待键合体上均识别多个位置点,并对多个位置点进行分析计算,导致速度很慢,因此,本发明的方法减少了第一待键合体与第二待键合体对准的时间,使得在确保所述第一待键合体与所述第二待键合体对准的同时,还使得键合效率得到大幅度的提高(例如芯片键合晶圆的产量从每小时低于1000个芯片提高到大于2000个芯片)。
94.本发明一实施例提供了一种键合方法,采用所述的键合装置将第一待键合体键合于第二待键合体上,所述键合装置参见上述内容,在此不再赘述。参阅图5,图5是本发明一实施例的键合方法的流程图,从图5中可看出,所述键合方法包括:
95.步骤s1,采用所述拾取部从所述第一承载台上拾取所述第一待键合体;
96.步骤s2,采用所述翻转部将拾取的所述第一待键合体从第一面向上翻转为第二面向上;
97.步骤s3,采用所述键合头下部吸附翻转后的所述第一待键合体;
98.步骤s4,采用所述传送部将吸附有所述第一待键合体的所述键合头下部移动到所
述键合头上部与所述第二承载台之间;
99.步骤s5,将所述键合头上部沿垂向移动,以使得所述键合头上部与所述键合头下部连接后,所述键合头下部与所述传送部分离,并通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二待键合体对准,所述键合头上部带动吸附有所述第一待键合体的所述键合头下部沿垂向移动,以将所述第一待键合体键合于所述第二待键合体上。
100.下面参阅图1~图4更为详细的介绍本实施例提供的键合方法。
101.其中,所述键合方法能够将芯片与晶圆键合、晶圆与晶圆键合或者芯片与芯片键合,或者也可以将其他类型的载片之间键合(例如芯片与玻璃键合),在此不做限制。
102.优选的,所述键合方法将芯片键合于晶圆上,芯片位于第一承载台上,晶圆位于第二承载台上,即所述第一待键合体为芯片,所述第二待键合体为晶圆。
103.下面以将第一承载台21上的芯片211键合于第二承载台25上的晶圆251上为例对所述键合方法进行说明。
104.按照步骤s1,采用所述拾取部221从所述第一承载台21上拾取所述芯片211。
105.在采用所述拾取部221从所述第一承载台21上拾取所述芯片211之前,所述键合方法还包括:采用所述拾取机构上集成的第一对准系统223识别所述第一承载台21上的对准标识,以使得所述芯片211和所述拾取机构分别与所述第一承载台21对准。
106.其中,可以将切割一晶圆(未图示)获得的多个芯片211放置于蓝膜(未图示)上,并采用机械臂(未图示)将放置有多个芯片211的蓝膜放置并固定于所述第一承载台21上。机械臂与所述第一对准系统223信号连接;在采用机械臂将放置有多个芯片211的蓝膜放置于所述第一承载台21上之前,先采用所述第一对准系统223识别所述第一承载台21上的对准标识,以使得所述蓝膜和所述芯片211能够与所述第一承载台21对准,确保所述蓝膜能够准确地放置于所述第一承载台21上的设定位置。并且,由于在切割一晶圆后,各个所述芯片211在所述蓝膜上的位置坐标已知,那么,在所述蓝膜放置于所述第一承载台21上的设定位置后,各个所述芯片211也会各自位于所述第一承载台21上对应的设定位置,即各个所述芯片211在所述第一承载台21上的位置也已知。
107.由于所述芯片211与所述第一承载台21对准且所述拾取机构与所述第一承载台21对准,使得所述芯片211与所述拾取机构对准,从而使得所述拾取部221能够准确拾取所述蓝膜上的每个所述芯片211。
108.所述第一承载台21和所述拾取机构均能在水平向和垂向移动。优选的,在上述实现所述芯片211与所述第一承载台21对准以及实现所述拾取机构与所述第一承载台21对准的过程中,所述拾取机构在水平向位移为0,所述第一承载台21在垂向位移为0,仅通过所述第一承载台21在水平向移动实现所述芯片211与所述拾取机构的对准。
109.采用所述拾取部221从所述第一承载台21上拾取所述芯片211的步骤可以包括:首先,水平移动所述第一承载台21,以将待拾取的所述芯片211对准拾取面向下的所述拾取部221;然后,将所述拾取机构沿垂向下移,以使得所述拾取部221拾取所述芯片211;然后,将所述拾取机构沿垂向上移。
110.按照步骤s2,采用所述翻转部222将拾取的所述芯片211从第一面向上翻转为第二面向上。
111.其步骤包括:首先,所述翻转部222带动拾取有所述芯片211的所述拾取部221在垂
直面旋转,使得拾取的所述芯片211从第一面向上翻转为第二面向上;然后,所述翻转部222在水平面旋转,以带动拾取有所述芯片211的所述拾取部221旋转至后续与键合头下部232相对的位置。并且,在上述步骤之后,所述翻转部222继续在垂直面旋转带动拾取面向上的所述拾取部221(此时,此拾取面向上的所述拾取部221上的芯片211被后续的键合头下部232拾取走)翻转为拾取面向下,且将其旋转至被拾取走的所述芯片211在所述第一承载台21上所在的位置,以使得在所述第一承载台21通过水平向的移动将后续待拾取的所述芯片211移动到此位置之后,重复上述步骤,直至完成对所述第一承载台21上的所有芯片211的拾取。
112.并且,所述第一面可以为所述芯片211的正面,所述第二面为所述芯片211的背面,所述芯片211的正面形成有各种器件结构,所述芯片211的背面为衬底,所述第一面和所述第二面为相对的面。需要说明的是,在其他实施例中,所述第一面也可以为所述芯片211的背面,所述第二面为所述芯片211的正面。
113.另外,所述拾取部221可以为伯努利吸嘴或真空吸嘴,伯努利吸嘴对所述芯片211是非接触式的吸附,真空吸嘴对所述芯片211是接触式的吸附。因此,当所述第一面为所述芯片211的正面时,优选所述拾取部221为伯努利吸嘴,以避免所述拾取部221拾取所述芯片211时与所述芯片211的正面接触,从而避免在所述芯片211的正面产生颗粒污染等缺陷。
114.按照步骤s3,采用所述键合头下部232吸附翻转后的所述芯片211。
115.优选的,所述键合头下部232为真空吸嘴,所述键合头下部232真空吸附所述芯片211,即所述键合头下部232对所述芯片211为接触式的吸附,以使得在后续所述芯片211与晶圆251键合时,键合头上部241向下施加的力能够通过所述键合头下部232施加给所述芯片211,进而使得能够顺利完成键合。在其他实施例中,所述键合头下部232也可以为伯努利吸嘴。
116.并且,若所述键合头下部232对所述芯片211为接触式的吸附,则优选所述第一面为所述芯片211的正面,所述第二面为所述芯片211的背面,以使得所述键合头下部232与所述芯片211的背面接触,避免所述键合头下部232与所述芯片211的正面接触而导致所述芯片211的正面产生颗粒污染等缺陷。
117.按照步骤s4,采用所述传送部将吸附有所述芯片211的所述键合头下部232移动到所述键合头上部241与所述第二承载台25之间。
118.若所述传送部包括至少一个辐条231,则通过在水平面或者垂直面旋转所述辐条231,以带动吸附有所述芯片211的所述键合头下部232旋转到所述键合头上部241与所述第二承载台25之间。
119.若所述传送部为导轨(未图示),则所述键合头下部232通过在导轨上移动,使得吸附有所述芯片211的所述键合头下部232移动到键合头上部241与所述第二承载台25之间。
120.当所述传送部包括至少一个辐条231时,所述传送部还可包括驱动轴233和固定环234,所述辐条231的两端与所述固定环234连接,且所述辐条231经过所述固定环234的中心,所述固定环234用于稳定所述辐条231,避免所述辐条231变形;所述驱动轴233垂向设置于所述辐条231的中心,以驱动所述辐条231在水平面或者垂直面旋转。
121.并且,当所述传送部包括至少一个辐条231时,为了提高效率,所述传送部可以包括至少两个沿所述固定环234的径向分布的辐条231,此时,所有的所述辐条231的中心相交
连接,所有的所述辐条231的中心相交于所述驱动轴233,以使得所述驱动轴233驱动所有的所述辐条231在水平面或者垂直面旋转,进而带动所有的所述键合头下部232旋转,以不断更替用于从所述拾取部221上吸附所述芯片211的键合头下部232以及用于与所述键合头上部241连接的键合头下部232。
122.所述键合头下部232与所述传送部之间可以通过真空吸附或磁力吸附,以使得所述键合头下部232可分离地设置于所述传送部上。
123.按照步骤s5,将所述键合头上部241沿垂向移动,以使得所述键合头上部241与所述键合头下部232连接后,所述键合头下部232与所述传送部分离,并通过所述第二承载台25在水平向的移动使得所述芯片211与所述晶圆251对准,所述键合头上部241带动吸附有所述芯片211的所述键合头下部232沿垂向移动,直至所述芯片211与所述晶圆251接触后,继续向下施力将所述芯片211键合于所述晶圆251上。
124.所述键合头上部241与所述键合头下部232之间可以通过真空吸附或者磁力吸附,以使得所述键合头上部241与所述键合头下部232之间可分离地连接。
125.并且,在将所述芯片211键合于所述晶圆251上之后,所述键合头上部241带动所述键合头下部232沿远离所述晶圆251的方向移动,所述键合头下部232与所述传送部接触后连接,连接后,所述键合头上部241与所述键合头下部232分离;然后,所述传送部将位于所述键合头上部241与所述第二承载台25之间的所述键合头下部232移走,使得所述键合头下部232继续从所述芯片拾取机构上吸附翻转后的芯片211。
126.并且,在更换位于所述键合头上部241与所述第二承载台25之间的键合头下部232的过程中,也将所述第二承载台25沿水平向移动,以将所述晶圆251上的下一待键合位置移动到与更换后的所述芯片211对准的位置。因此,通过所述第二承载台25在水平向的移动、所述传送部的传送以及所述键合头上部241的垂向移动,使得能够依次实现对所有的所述芯片211键合于所述晶圆251上。
127.并且,当所述传送部包括至少一个辐条231时,位于同一所述辐条231两端的两个所述键合头下部232中,当其中一个键合头下部232位于所述键合头上部241与所述第二承载台25之间时,另一个键合头下部232正位于拾取面向上的所述拾取部221的上方。
128.并且,为了使得所述芯片211在所述晶圆251上的键合位置更加准确,所述第二承载台25的移动精度大于所述第一承载台21的移动精度,所述第二承载台25为高精度的承载台,使得所述芯片211与所述晶圆251的键合精度达到纳米级。
129.优选的,在将所述键合头上部241沿垂向移动之前,所述键合方法还包括:采用所述键合头上部241上集成的第二对准系统242识别所述第二承载台25上的对准标识,使得所述晶圆251和所述键合头上部241分别与所述第二承载台25对准,进而使得所述晶圆251与所述键合头上部241对准,从而使得能够避免所述键合头上部241与所述晶圆251出现对准偏差。
130.另外,在所述键合头上部241与所述键合头下部232连接之后,所述键合方法还包括:通过所述第二承载台25在水平向的移动使得所述芯片211与所述晶圆251对准,具体地,采用所述第二对准系统242识别所述键合头下部232吸附的所述芯片211与所述键合头上部241上的固定基准点之间的水平距离,以在将所述芯片211键合于所述晶圆251上时补偿所述芯片211与所述晶圆251之间的偏差,使得所述芯片211在所述晶圆251上的键合位置的准
确性得到提高。
131.其中,识别所述键合头下部232吸附的所述芯片211与所述键合头上部241上的固定基准点之间的水平距离的方法包括但不限于:在所述键合头下部232的底面设置刻度标记,并在所述第二承载台25的外围设置至少一反射镜(未图示),采用反射镜将所述芯片211位于所述键合头下部232底面处对应的刻度标记信息反射给所述第二对准系统242,进而根据刻度标记信息确认所述芯片211与所述固定基准点之间的水平距离。
132.并且,由于所述键合头上部241与所述晶圆251是对准的,那么,所述固定基准点与所述晶圆251也是对准的,因此,所述固定基准点可以为所述键合头上部241上的任一位置。
133.所述第二承载台25和所述键合头上部241均能在水平向和垂向移动。优选的,在上述实现所述晶圆251与所述键合头上部241对准以及实现所述芯片211与所述晶圆251对准的过程中,所述键合头上部241在水平向位移为0,所述第二承载台25在垂向位移为0,仅通过所述第二承载台25在水平向移动来实现。
134.因此,本发明在所述传送部与所述键合头下部232可分离地连接以及所述键合头上部241与所述键合头下部232可分离地连接的基础上,通过所述第二承载台25在水平向移动实现所述芯片211与所述晶圆251对准以及通过所述键合头上部241垂向移动实现所述芯片211键合于所述晶圆251上,使得能够避免所述键合头上部241水平移动发生惯性而产生水平偏差,从而能够减小所述芯片211与所述晶圆251的对准偏差。
135.并且,优选的,所述第二对准系统242的分辨率大于所述第一对准系统223的分辨率,所述第二对准系统242具有高倍清晰镜头。虽然高倍清晰镜头的体积和重量均比较大,但是,由于是通过所述第二承载台25在水平向移动实现所述芯片211与所述晶圆251对准,而所述键合头上部241在水平向位移为0,从而能够避免集成高倍清晰镜头对对准精度产生影响,进而能够避免所述芯片211与所述晶圆251上的待键合位置之间的对准精度降低。
136.另外,优选的,在所述键合头上部241与所述键合头下部232连接之后,所述键合方法还可包括:首先,以所述晶圆251的圆心为原点建立坐标系;然后,采用所述第二对准系统242识别所述晶圆251上的多个对准标识,读取各个对准标识在所述晶圆251上的实际位置与在所述坐标系中的理论位置,并计算实际位置与理论位置之间的偏差,接着根据此偏差拟合出所述晶圆251上的各个实际待键合位置与所述坐标系中对应的各个理论待键合位置之间的偏差,以在将所述芯片211键合于所述晶圆251上时补偿所述芯片211与所述晶圆251上的实际待键合位置之间的偏差,进而使得所述芯片211在所述晶圆251上的键合位置的准确性得到进一步提高。
137.其中,实际位置与理论位置之间的偏差包含:在水平向(即x方向和y方向)的移动偏差以及旋转偏差等。
138.综上所述,本发明提供的键合方法,采用所述的键合装置将第一待键合体键合于第二待键合体上,具体包括:采用所述拾取部从所述第一承载台上拾取所述第一待键合体;采用所述翻转部将拾取的所述第一待键合体从第一面向上翻转为第二面向上;采用所述键合头下部吸附翻转后的所述第一待键合体;采用所述传送部将吸附有所述第一待键合体的所述键合头下部移动到所述键合头上部与所述第二承载台之间;将所述键合头上部沿垂向移动,以使得所述键合头上部与所述键合头下部连接后,所述键合头下部与所述传送部分离,并通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二待键合体对
准,所述键合头上部带动吸附有所述第一待键合体的所述键合头下部沿垂向移动,以将所述第一待键合体键合于所述第二待键合体上。由于将用于吸附翻转后的所述第一待键合体的所述键合头下部与所述键合头上部可分离地连接,且通过所述第二承载台在水平向的移动使得所述第一待键合体与所述第二待键合体对准,所述键合头上部在水平向上的位移为0,使得所述键合头上部上能够集成体积和重量均比较大的高倍清晰镜头的同时,也不会对所述键合头上部产生影响,进而使得所述第一待键合体与所述第二待键合体的对准精度得到提高(例如,芯片与晶圆的对准精度可达到200nm以内)。
139.进一步的,在每次将所述第一待键合体键合于所述第二待键合体上之前,只需采用所述键合头上部上集成的所述第二对准系统识别所述键合头下部吸附的所述第一待键合体与所述键合头上部上的固定基准点之间的水平距离,无需每次识别所述第一待键合体与所述第二待键合体之间的相对位置。其中,由于前者所述第二对准系统只需识别所述第一待键合体在所述键合头下部底面的一个位置点,并将此位置点与固定基准点之间的水平距离进行计算即可,速度很快;而后者需要在所述第一待键合体和所述第二待键合体上均识别多个位置点,并对多个位置点进行分析计算,导致速度很慢,因此,本发明的方法减少了第一待键合体与第二待键合体对准的时间,使得在确保所述第一待键合体与所述第二待键合体对准的同时,还使得键合效率得到大幅度的提高(例如芯片键合晶圆的产量从每小时低于1000个芯片提高到大于2000个芯片)。
140.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1