一种位移台的控制方法及装置与流程
本技术涉及电子,尤其涉及一种位移台的控制方法及装置。
背景技术:
1、目前,通过半导体系统实现样品的刻蚀或者检测,比如,该半导体系统可以为光刻机(lithography,litho)系统、电子显微镜(scanning electron microscope,sem)系统或明场检测仪(bright field inspection,bfi)系统等。通常,半导体系统可以包括:镜组、位于镜组下方的位移台、与该位移台连接的控制器和位于位移台远离镜组一侧的促动器。其中,镜组可用于刻蚀或者检测样品,位移台可用于放置样品,比如,该位移台靠近镜组的一侧可用于放置样品,位移台也可以称为工件台,控制器可用于控制促动器运动以促动位移台移动。比如,镜组在对样品的待测区域进行检测时,由于镜组的焦点深度(depthoffocus,dof)和视场较小,控制器需要控制位移台运动,使得样品的待测区域与镜组平行,且使得待测区域在镜组的dof和视场中,以保证检测的质量。
技术实现思路
1、本技术提供一种位移台的控制方法及装置,电子技术领域,用于在提高位移台转动中心的精确度。
2、为达到上述目的,本技术采用如下技术方案:
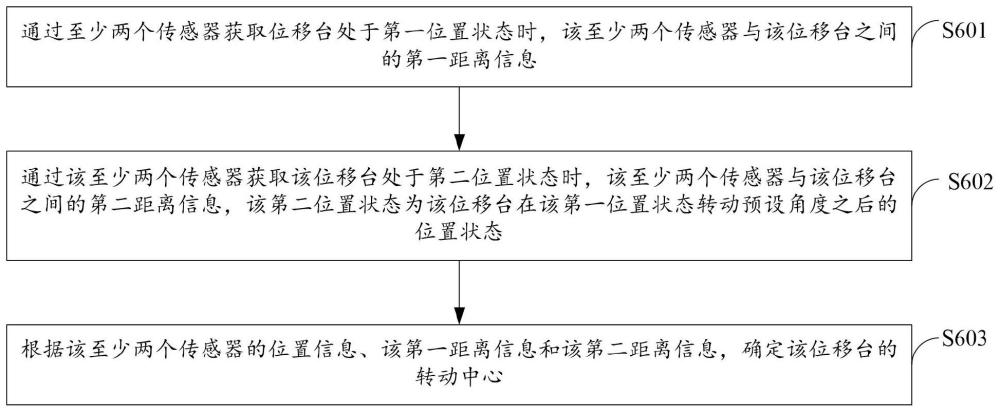
3、第一方面,提供一种位移台的控制方法,该方法应用于半导体系统中,该半导体系统包括位移台和设置在该位移台上方的至少两个传感器,该方法包括:通过该至少两个传感器获取该位移台处于第一位置状态时,该至少两个传感器与该位移台之间的第一距离信息;通过该至少两个传感器获取该位移台处于第二位置状态时,该至少两个传感器与该位移台之间的第二距离信息,该第二位置状态为该位移台在该第一位置状态转动预设角度之后的位置状态;根据该至少两个传感器的位置信息、该第一距离信息和该第二距离信息,确定该位移台的转动中心。
4、上述技术方案中,通过设置在该位移台上方的至少两个传感器分别测量位移台处于第一位置状态和第二位置状态时,该至少两个传感器与位移台之间的第一距离信息和第二距离信息,根据实际测量得到的第一距离信息、第二距离信息和该至少两个传感器的位置信息,确定位移台的转动中心,提高了转动中心的精确度;进一步的,当镜组在对样品的待测区域进行检测时,利用该转动中心控制位移台运动,使得待测区域在镜组的焦深和视场中,在提高了运动的准确性的同时,保证了检测的质量。
5、在第一方面的一种可能的实现方式中,根据该至少两个传感器的位置信息、该第一距离信息和该第二距离信息,确定该位移台的转动中心,包括:根据该至少两个传感器的位置信息,确定该至少两个传感器的中心位置;根据该第一距离信息、该第二距离信息和该至少两个传感器之间的距离,确定该中心位置与该转动中心之间的第一偏距;根据该第一偏距,确定该转动中心。上述可能的实现方式中,通过至少两个传感器的位置信息,确定该至少两个传感器的中心位置,根据第一距离信息、该第二距离信息和该至少两个传感器之间的距离,确定中心位置与转动中心的第一偏距,根据该第一偏距确定该转动中心,提高了转动中心的精确度。
6、在第一方面的一种可能的实现方式中,该至少两个传感器包括第一传感器和第二传感器,该第一距离信息包括该第一传感器和该第二传感器分别与该位移台之间的高度值h1和高度值h2,该第二距离信息包括该第一传感器和该第二传感器分别与该位移台之间的高度值h3和高度值h4,该至少两个传感器之间的距离包括该第一传感器与该第二传感器之间的距离l1,该第一偏距δx1满足:上述可能的实现方式中,根据位移台位于不同位置状态时,实际测量得到的高度值以及第一传感器与该第二传感器之间的距离l1,确定该第一偏距,根据第一偏距确定该转动中心,提高了转动中心的精确度。
7、在第一方面的一种可能的实现方式中,该根据该第一偏距,确定该转动中心之前,该方法还包括:若第一数值大于第二数值,确定该转动中心在该第一传感器和该第二传感器的中心位置的右侧;若该第一数值小于该第二数值,确定该转动中心在该第一传感器和该第二传感器的中心位置的左侧,其中,该高度值h1与该高度值h3的差值的绝对值为该第一数值,该高度值h2与该高度值h4的差值的绝对值为该第二数值。上述可能的实现方式中,根据第一传感器处于第一位置状态和第二位置状态时的高度值的差值,以及该第二传感器处于第一位置状态和第二位置状态时的高度值的差值,确定转动中心与该中心位置的位置关系,提高了后续确定转动中心的速度。
8、在第一方面的一种可能的实现方式中,该至少两个传感器还包括第三传感器,该第一传感器、该第二传感器和该第三传感器不在一条直线上,该第一距离信息还包括该第三传感器与该位移台之间的高度值h5,该第二距离信息还包括该第三传感器与该位移台之间的高度值h6,该至少两个传感器之间的距离还包括该第二传感器和该第三传感器之间的距离l2;该根据该至少两个传感器的位置信息、该第一距离信息和该第二距离信息,确定该位移台的转动中心,包括:根据该高度值h1、该高度值h2、该高度值h3、该高度值h4和该距离l1,确定该第一传感器与该第二传感器的中心位置与该转动中心的第一子偏距;根据该高度值h2、该高度值h4、该高度值h5、该高度值h6和该距离l2,确定该第二传感器与该第三传感器的中心位置与该转动中心的第二子偏距;根据该第一子偏距和该第二子偏距,确定该转动中心。上述可能的实现方式中,通过三个传感器分别测量位移台处于不同位置状态时,三个传感器与位移台之间的距离信息,根据实际测量得到的距离信息和三个传感器的位置信息,确定位移台的转动中心,与两个传感器相比,进一步提高了转动中心的精确度。
9、在第一方面的一种可能的实现方式中,该半导体系统还包括镜组,该至少两个传感器位于该镜组的四周,该根据该转动中心,控制该位移台运动,包括:根据该镜组的位置信息,确定该镜组与该中心位置之间的第二偏距;根据该第一偏距和该第二偏距之和,控制该位移台运动。上述可能的实现方式中,当镜组在对样品的待测区域进行检测时,根据该第一偏距和该第二偏距之和控制该位移台运动,即根据该镜组与该转动中心的偏差控制该位移台运动,消除了该镜组与该转动中心之间的偏差,使得待测区域在镜组的焦深和视场中,提高了运动的准确性,且保证了检测的质量。
10、第二方面,提供一种移台的控制装置,该装置位于半导体系统中,该半导体系统包括位移台和设置在该位移台上方的至少两个传感器,该装置包括:获取单元,用于通过该至少两个传感器获取该位移台处于第一位置状态时,该至少两个传感器与该位移台之间的第一距离信息;该获取单元,还用于通过该至少两个传感器获取该位移台处于第二位置状态时,该至少两个传感器与该位移台之间的第二距离信息,该第二位置状态为该位移台在该第一位置状态转动预设角度之后的位置状态;确定单元,用于根据该至少两个传感器的位置信息、该第一距离信息和该第二距离信息,确定该位移台的转动中心。
11、在第二方面的一种可能的实现方式中,该确定单元还用于:根据该至少两个传感器的位置信息,确定该至少两个传感器的中心位置;根据该第一距离信息、该第二距离信息和该至少两个传感器之间的距离,确定该中心位置与该转动中心之间的第一偏距;根据该第一偏距,确定该转动中心。
12、在第二方面的一种可能的实现方式中,该至少两个传感器包括第一传感器和第二传感器,该第一距离信息包括该第一传感器和该第二传感器分别与该位移台之间的高度值h1和高度值h2,该第二距离信息包括该第一传感器和该第二传感器分别与该位移台之间的高度值h3和高度值h4,该至少两个传感器之间的距离包括该第一传感器与该第二传感器之间的距离l1,该第一偏距δx1满足:
13、在第二方面的一种可能的实现方式中,该确定单元还用于:若第一数值大于第二数值,确定该转动中心在该第一传感器和该第二传感器的中心位置的右侧;若该第一数值小于该第二数值,确定该转动中心在该第一传感器和该第二传感器的中心位置的左侧,其中,该高度值h1与该高度值h3的差值的绝对值为该第一数值,该高度值h2与该高度值h4的差值的绝对值为该第二数值。
14、在第二方面的一种可能的实现方式中,该至少两个传感器还包括第三传感器,该第一传感器、该第二传感器和该第三传感器不在一条直线上,该第一距离信息还包括该第三传感器与该位移台之间的高度值h5,该第二距离信息还包括该第三传感器与该位移台之间的高度值h6,该至少两个传感器之间的距离还包括该第二传感器和该第三传感器之间的距离l2,该确定单元还用于:根据该高度值h1、该高度值h2、该高度值h3、该高度值h4和该距离l1,确定该第一传感器与该第二传感器的中心位置与该转动中心的第一子偏距;根据该高度值h2、该高度值h4、该高度值h5、该高度值h6和该距离l2,确定该第二传感器与该第三传感器的中心位置与该转动中心的第二子偏距;根据该第一子偏距和该第二子偏距,确定该转动中心。
15、在第二方面的一种可能的实现方式中,该半导体系统还包括镜组,该至少两个传感器位于该镜组的四周,该装置还包括控制单元,该控制单元用于:根据该镜组的位置信息,确定该镜组与该第一传感器和该第二传感器的中心位置之间的第二偏距;根据该第一偏距和该第二偏距之和,控制该位移台运动。
16、第三方面,提供一种半导体系统,该系统包括固定框架、镜组、设置在该镜组四周的至少两个传感器,控制器和设置在该镜组下方的位移台,该固定框架用于固定所述镜组,该控制器和该位移台通过线缆连接,该控制器和所述至少两个传感器通过线缆连接,该至少两个传感器用于测量该位移台与该至少两个传感器之间的高度值,该控制器用于控制该位移台运动,该控制器为上述第二方面或者第二方面的任一种可能的实现方式所提供的位移台的控制装置。
17、在第三方面的一种可能的实现方式中,该至少两个传感器固定连接于该固定框架上。
18、在第三方面的一种可能的实现方式中,该半导体系统还包括与该位移台分开设置的测量框架,该至少两个传感器固定连接于该测量框架上,该至少两个传感器与该位移台之间存在一定距离。
19、在本技术的又一方面,提供一种计算机可读存储介质,该计算机可读存储介质包括计算机指令,当该计算机指令在位移台的控制装置上运行时,使得该位移台的控制装置执行如上述第一方面或者第一方面的任一种可能的实现方式所提供的位移台的控制方法。
20、在本技术的又一方面,提供一种包含指令的计算机程序产品,当计算机程序产品在计算机设备上运行时,使得位移台的控制装置执行如上述第一方面或者第一方面的任一种可能的实现方式所提供的位移台的控制方法。
21、可以理解地,上述提供的一种位移台的控制装置、计算机可读存储介质和计算机程序产品可用于执行上文所提供的对应的方法,因此,其所能达到的有益效果可参考上文所提供的对应的方法中的有益效果,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!