一种智能视觉机器人专用柔性运动电缆的制作方法
1.本发明涉及电缆技术领域,具体涉及一种智能视觉机器人专用柔性运动电缆。
背景技术:
2.随着创新科技人工智能、大数据、5g、智能传感给人们的生活带来了翻天覆地的变化,以人工智能为核心的机器人领域正越来越突出“人的多关节随机而发的特征”,未来机器人将更为智能和灵活,机器人视觉,语音识别等细分领域初具规模,人工智能正从极具想像力的商业概念将成为具有超大发展前景的商业赛道,人工智能正深刻融入新一轮科技革命和产业变革大潮中,主导着未来商业发展的方向。
3.智能视觉机器人能够基于视觉信息来控制机器人末端执行器(机械臂)相对目标或是目标特征的相对位置和姿态。如八轴智能视觉焊接机器人是一种八自由度专用机器人,其中六轴属于焊接机器人,另外二轴属于焊接变位机,操作系统可以实现焊接机器人和变位机互相协调运动,采用运动控制卡的方式来实现对机器人空间位置与速度的控制。焊接变位机同焊接机器人配合,扩展了焊接机器人的工作空间,提高了焊接生产效率和焊接质量。上述机器人采用接触式焊缝跟踪和摄像机焊缝跟踪系统相结合,焊前对焊缝进行数据和图像采集,通过计算机软件对焊缝数据及图像进行处理,生成虚拟焊缝,由虚拟焊缝识别系统控制执行机构在焊接时进行焊缝跟踪,提高焊缝质量。在焊枪部分安装人体红外感应开关,保证工作人员安全;并且将视觉传感器作为测量工具来测量机器人末端或是目标的位置,利用视觉信息来控制机器人末端执行器相对目标或是目标特征的相对位置和姿态,从而减少抓取错误及失误。
4.通常,智能视觉机器人的动作都是由电机控制动作,实现机器人的精准定位动作,但是采用上述方案,动作缓慢,灵活度不够。为了提高灵活性能,现开发了一种新的机器人驱动方式,其原理是将机器人的机械臂通过气体管道与空压机连接,通过控制空压机的持续充放气实现气体管道的伸缩、弯曲动作,进而带动机械臂的精准运动,大大提高灵活性。
5.但是目前,作为智能视觉机器人的柔性电缆,当前主要是以独立单元存在的,就是以单独1根usb线独立存在,或者是以单独1根hdmi线独立存在,而不是统一体。其次,当前智能视觉机器人的柔性电缆,不具备自由伸展精准定位的特种功能,也就是说,常规柔性电缆只能被动地跟随机械人动作而动作,但是柔性电缆的位置变化会导致电缆与机器人之间的相对作用力产生变化,柔性电缆的动作与机器人的动作是难以保持稳定同步,从而会影响到智能视觉机器人运动的准确度。
技术实现要素:
6.为了克服背景技术的不足,本发明提供一种智能视觉机器人专用柔性运动电缆。
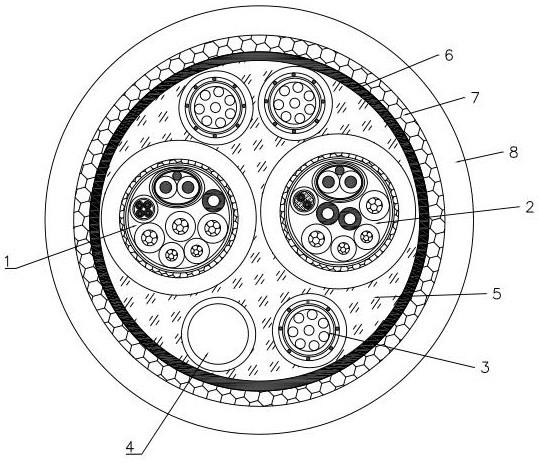
7.本发明所采用的技术方案:一种智能视觉机器人专用柔性运动电缆,包括从内至外依次设置的总缆芯、总线包带层、总线编织层以及总线外护套,所述总缆芯整体呈圆形,其包括一根音视频线、一根存储线、三根伸缩管、一根硅胶软管以及总填充材料。
8.所述伸缩管包括发泡绝缘体,所述发泡绝缘体上形成有多个均匀布置的中空管道,所述发泡绝缘体外包覆有伸缩管包带层,所述伸缩管包带层外设有钢丝编织层,所述钢丝编织层外设有伸缩管中被层。
9.所述音视频线包括从内至外依次设置的音视频线缆芯、音视频线包带层、音视频线编织层、音视频线护套;所述音视频线缆芯由第一差分信号线、第一音频传输线、三根第一电源线、二根第一视频控制线以及若干第一填充pe条组成,整体呈圆形。
10.所述存储线包括从内至外依次设置的存储线缆芯、存储线包带层、存储线编织层、存储线护套;所述存储线缆芯由第二差分信号线、第二音频传输线、二根第二电源线、二根第二视频控制线、若干第二填充pe条组成,整体呈圆形。
11.所述第一差分信号线与第二差分信号线的导体均采用镀银绞合铜线。
12.所述第一音频传输线与第二音频传输线的导体均采用单模光纤芯。
13.所述总线包带层、音视频线包带层、存储线包带层均包括两层结构,第一层采用eptfe包带,第二层采用铝箔麦拉包带。
14.所述总线编织层、音视频线编织层、存储线编织层均采用镀锡铜箔丝与镀锡铜丝混合编织。
15.所述总线外护套、音视频线护套、存储线护套均采用tpu材料护套。
16.所述总填充材料采用凯夫拉400d。
17.本发明的有益效果是:采用以上方案,将音视频线与存储线形成一个统一的整体结构,同时设置三根伸缩管与一根硅胶软管,伸缩管、硅胶软管能够用于与空压机分管的连接,通过控制空压机进行持续的充放气能够实现电缆的主动性动作以满足机器人动作要求,实现机器人精准动作,达到完成精细的抓取动作要求。
附图说明
18.图1为本发明实施例智能视觉机器人专用柔性运动电缆的纵向结构示意图。
19.图2为本发明实施例智能视觉机器人专用柔性运动电缆的结构示意图。
20.图3为本发明实施例音视频线的结构示意图。
21.图4为本发明实施例第一差分信号线的结构示意图。
22.图5为本发明实施例第一音频传输线的结构示意图。
23.图6为本发明实施例存储线的结构示意图。
24.图7为本发明实施例第二差分信号线的结构示意图。
25.图8为本发明实施例第二音频传输线的结构示意图。
26.图9为本发明实施例伸缩管的结构示意图。
具体实施方式
27.下面结合附图对本发明实施例作进一步说明。
28.如图1-2所示,一种智能视觉机器人专用柔性运动电缆,包括从内至外依次设置的总缆芯、总线包带层6、总线编织层7以及总线外护套8,所述总缆芯整体呈圆形,其包括一根音视频线1、一根存储线2、三根伸缩管3、一根硅胶软管4以及总填充材料5。
29.如图3-5所示,所述音视频线1包括从内至外依次设置的音视频线缆芯、音视频线
包带层16、音视频线编织层17、音视频线护套18;所述音视频线缆芯由第一差分信号线11、第一音频传输线12、三根第一电源线13、二根第一视频控制线14以及若干第一填充pe条15组成。
30.所述第一差分信号线11包括两根第一信号线111、一根第一信号地线112,所述第一信号线111采用28awg(7/0.127)镀银绞合铜线作为导体,采用fep材料作为绝缘,两根第一信号线111相互对绞,采用镀银绞合铜线作为第一信号线111的导体,使其具有极快的传输速度以及极高的导电率。
31.所述第一信号地线112则直接采用28awg(7/0.127)镀银绞合铜线,无外绝缘,所述第一信号线111与第一信号地线112外共同包覆有第一pet包带层113,其采用宽6mm/厚0.035mm的pet包带,包带遮蔽率135%,所述第一pet包带层113外包覆有第一al/my包带层114,其采用宽7mm/厚0.035mm的铝箔麦拉包带,包带遮蔽率135%,所述第一al/my包带层114外包覆有第一热融包带115,包带遮蔽率135%,多重包带结构,结构稳定,其中铝箔麦拉包带具有单面导电,单面绝缘的作用,使得第一差分信号线11具有较好的屏蔽效果,具有较好的高保真信号传输效果。
32.所述第一音频传输线12包括四根第一音频光纤121,所述四根第一音频光纤121分别采用om1.5、om2或om2+、om3和om4单模光纤芯,采用了单模光纤传输,信号不受外界任何rfi/emi干扰,光纤芯外形成有两层绝缘结构,分别为fep材料的内绝缘与采用hdpe材料的外绝缘,四根第一音频光纤121相互绞合,且四根音频光纤121外共同包覆有第一eptfe包带层122,其采用宽8mm/厚0.005mm的eptfe包带,包带遮蔽率135%,eptfe包带具有超强的防水性,透湿性,防风性,不受任何化学试剂腐蚀,不吸潮,不燃烧,对氧气,紫外线均极稳定,具有超强的生物适应性,所述eptfe包带层122外形成第一中被层123,所述第一中被层123采用气相型混炼型工业级硅橡胶。
33.所述第一电源线13采用24awg(19/0.12)镀锡绞合铜线作为导体,采用tpee材料作为绝缘。
34.所述第一视频控制线14采用26awg(11/0.12)镀锡绞合铜线作为导体,采用fep材料作为绝缘。
35.所述第一填充pe条15设有1-3根,按实际圆整度填充,保证音视频线缆芯整体呈圆形。
36.所述音视频线包带层16包括音视频线pet包带层与音视频线al/my包带层,所述音视频线pet包带层16采用宽10mm/厚0.035mm的pet包带,并包覆在音视频线缆芯外,包带遮蔽率135%,所述音视频线al/my包带层采用宽12mm/厚0.035mm的铝箔麦拉包带,并包覆在音视频线pet包带层,包带遮蔽率135%。其中铝箔麦拉包带具有单面导电,单面绝缘的作用,使得音视频线1具有较好的屏蔽效果,具有较好的高保真信号传输效果。
37.所述音视频线编织层17采用8锭30awg镀锡铜箔丝和8锭镀锡铜丝共同编制而成,组合编织极大地提升了编织的柔软度及弯曲摇摆性能,同时有效隔离了外界电磁波和机器人设备辐射源及无线电波的干扰。
38.所述音视频线护套18采用tpu材料,tpu护套具有优异的高张力和高拉力,高强韧性抗撕裂,极强的耐曲折性能,而且耐磨耐寒耐油,耐水耐老化,耐气候耐霉菌;同时,具有防风防寒,保暖抗紫外线和能量释放功能。其次,机械强度高,承载能力强,抗冲击性和减震
性能好。
39.上述音视频线1主要用于传输智能视觉机器人操作过程中的高清信号,同时也可实现高清信号音视频效果转换,完成精准识别与动作,支持8k等更高分辨率的视频和更好的音频效果。
40.如图6-8所示,所述存储线2包括从内至外依次设置的存储线缆芯、存储线包带层26、存储线编织层27、存储线护套28;所述存储线缆芯由第二差分信号线21、第二音频传输线22、二根第二电源线23、二根第二视频控制线24、若干第二填充pe条25组成。
41.所述第二差分信号线21包括两根第二信号线211、一根第二信号地线212,所述第二信号线211采用28awg(7/0.127)镀银绞合铜线作为导体,采用fep材料作为绝缘,两根第二信号线211相互对绞,采用镀银绞合铜线作为第二信号线211的导体,使其具有极快的传输速度以及极高的导电率。
42.所述第二信号地线212则直接采用28awg(7/0.127)镀银绞合铜线,无外绝缘,所述第二信号线211与第二信号地线212外共同包覆有第二pet包带层213,其采用宽6mm/厚0.035mm的pet包带,包带遮蔽率135%,所述第二pet包带层213外包覆有第二al/my包带层214,其采用宽7mm/厚0.035mm的铝箔麦拉包带,包带遮蔽率135%,所述第二al/my包带层214外包覆有第二热融包带215,包带遮蔽率135%,多重包带结构,其中铝箔麦拉包带具有单面导电,单面绝缘的作用,使得第二差分信号线21具有较好的屏蔽效果,具有较好的高保真信号传输效果。
43.所述第二音频传输线22包括二根第二音频光纤221,所述二根第二音频光纤221分别采用om1.5、om2或om2+的单模光纤芯,采用了单模光纤传输,信号不受外界任何rfi/emi干扰,光纤芯外形成有两层绝缘结构,分别为fep材料的内绝缘与采用hdpe材料的外绝缘,二根第二音频光纤221相互绞合,并采用400d凯夫拉*多束纤维进行填充,二根第二音频光纤221外共同包覆有第二eptfe包带层222,其采用宽8mm/厚0.005mm的eptfe包带,包带遮蔽率135%,所述第二eptfe包带层222外形成第二中被层223,所述第二中被层223采用气相型混炼型工业级硅橡胶。
44.所述第二电源线23采用24awg(19/0.12)镀锡绞合铜线作为导体,采用tpee材料作为绝缘。
45.所述第二视频控制线24采用26awg(11/0.12)镀锡绞合铜线作为导体,采用fep材料作为绝缘。
46.所述第二填充pe条25设有1-3根,按实际圆整度填充,保证存储线缆芯整体呈圆形。
47.所述存储线包带层26包括存储线pet包带层与存储线al/my包带层,所述存储线pet包带层采用宽10mm/厚0.035mm的pet包带,并包覆在存储线缆芯外,包带遮蔽率135%,所述存储线al/my包带层采用宽12mm/厚0.035mm的铝箔麦拉包带,并包覆在存储线pet包带层,包带遮蔽率135%。其中铝箔麦拉包带具有单面导电,单面绝缘的作用,使得存储线1具有较好的屏蔽效果,具有较好的高保真信号传输效果。
48.所述存储线编织层27采用8锭30awg镀锡铜箔丝和8锭镀锡铜丝共同编制而成,组合编织极大地提升了编织的柔软度及弯曲摇摆性能,同时有效隔离了外界电磁波和机器人设备辐射源及无线电波的干扰。
49.所述存储线护套28采用tpu材料,tpu护套具有优异的高张力和高拉力,高强韧性抗撕裂,极强的耐曲折性能,而且耐磨耐寒耐油,耐水耐老化,耐气候耐霉菌;同时,具有防风防寒,保暖抗紫外线和能量释放功能。其次,机械强度高,承载能力强,抗冲击性和减震性能好。
50.上述存储线2最高能够达到80gbps数据运行,覆盖40gbps 无源电缆和新定义的80gbps 有源电缆,平向兼容雷电3,向下兼容usb3.0/usb3.1/usb3.0/usb2.0;支持更好的视频和数据带宽分配,同时传输机器人指令操作中的视频和数据信息,20%带宽用于视频传输,80%用于数据传输。
51.如图7所示,所述伸缩管3包括发泡绝缘体31,所述发泡绝缘体31外包覆有伸缩管包带层33,所述伸缩管包带层33外设有钢丝编织层34,所述钢丝编织层34外设有伸缩管中被层35。
52.所述发泡绝缘体31采用ldpe或改性pe优质材料,通过电子交联技术对主要原料聚乙烯,加热发泡到5~35倍,形成板状高密度发泡体,所述发泡绝缘体31上形成有多个均匀布置的1.6mm中空管道32,用于连接空压机气管的分管进行充放气,可以实现适应智能视觉机器人完成整体动态的伸缩和弯曲动作;其次,通过精密的算法定位,能够满足机器人的细节精密动作,满足智能化完美定位需求。
53.所述伸缩管包带层33采用ptfe包带,ptfe包带具有高稳定性,高阻燃性和低损耗因子,耐侯耐热摩擦系数小,化学性能稳定,电绝缘性良好,能使音视频线1和存储线2的介电强度、介电常数、体积电阻率和表面电阻率保持良好,具有低吸湿性,使线缆的介电性能不逐级湿度影响,并使线缆在高温和压力下保持低衰减。
54.所述钢丝编织层34采用8根0.2mm的编织钢丝,采用16锭编织机完成,上下锭各放4根0.2mm钢丝,通过8根编织钢丝能够承受上述电缆在完成各种动作和扭转及往复前进的运动力。
55.所述伸缩管中被层35采用tpu材料,tpu材料具有良好的耐磨和耐撕裂能力,耐矿物油,耐臭氧,耐老化(适用温度-45~+150℃环境工作),耐辐射,耐低温,耐紫外线,耐化学品,生物相容性优秀(耐水解和耐微生物),无气味,无挥发物,具有优良的拉伸和柔韧性能,机械强度很高(即使处于150℃热空气和高温老化后时),与其他材料相融性好,回弹性好,防水等级高,抗污性强,表面不易吸附灰尘,不易受到污染。非常适合智能视觉机器人的灵活多位变化和变位往复动作,同时具有超强耐扭转动作和运动状态下的持续高强度运行。
56.另外,硅胶软管4高弹性高抗撕裂气相型混炼透明硅胶主要原料,内径为4mm,其同样连接空压机气管的分管进行充放气,协调视觉信息来控制机器人末端执行器相对目标或是目标特征的相对位置和姿态,从而减少抓取失误或抓取错误,达到完成精细的抓取动作要求。
57.所述总填充材料5采用凯夫拉400d,其能够增强整条电缆的机械抗拉强度,同时减缓电缆在动态运行过程中在外力突发状态下的急骤瞬间拉力;还可以化解整条电缆在工作状态中的突发扭转弯折作用力及来自不同方向的机械应力。
58.所述总线包带层6同样设有两层结构,包括总线eptfe包带层与总线al/my屏蔽包带层,总线eptfe包带层采用宽45mm/厚0.05mm的eptfe包带,总线al/my屏蔽包带层采用宽45mm/厚0.025mm的铝箔麦拉包带,包覆率130%~135%,eptfe包带具有超强的防水性,透湿
性,防风性,不受任何化学试剂腐蚀,不吸潮,不燃烧,对氧气,紫外线均极稳定,具有超强的生物适应性,铝箔麦拉包带具有单面导电,单面绝缘的作用,可以抵抗设备和设备之间,电缆和电缆之间,电缆和设备之间的杂讯干扰和电磁波干扰,为工作环境和电缆信号传输保持较好的信号全面传输。
59.所述总线编织层7采用镀锡铜箔丝与镀锡铜丝混合编织,采用24锭高速静音式编织机作业,具体由8束/30awg镀锡铜箔丝+16/10/0.12mm镀锡铜丝混合编织,组合编织极大地提升了编织的柔软度及弯曲摇摆性能,同时有效隔离了外界电磁波和机器人设备辐射源及无线电波的干扰。
60.所述总线外护套8选用tpu护套,具有优异的高张力和高拉力,高强韧性抗撕裂,极强的耐曲折性能,高度环保。而且耐磨耐寒耐油,耐水耐老化,耐气候耐霉菌;同时,具有防风防寒,保暖抗紫外线和能量释放功能。其次,机械强度高,承载能力强,抗冲击性和减震性能突出。
61.上述智能视觉机器人专用柔性运动电缆专用于智能视觉机器人,比如八轴智能视觉焊接机器人,其具有以下优点:1、将音视频线与存储线形成一个统一的整体结构;2、同时设置三根伸缩管与一根硅胶软管,伸缩管与硅胶软管均能够用于与空压机分管的连接,通过控制空压机进行持续的充放气,能够实现电缆伸缩和弯曲动作,结合机器人的视觉系统能够实现精准定位,通过电缆的主动性动作以满足机器人动作要求,实现机器人精准动作,达到完成精细的抓取动作要求;3、所述第一差分信号线与第二差分信号线的导体均采用28awg镀银绞合铜线,传输速度极快,导电率极高,另外音视频线与存储线的各层结构不管是在材质选择还是生产工艺,都基本保持一致,使得两者在通信信号传输上寻求到了一个最佳平衡传输,动作上也形成稳定的一致性;4、第一音频传输线与第二音频传输线军采用单模光纤传输,信号不受外界任何rfi/emi干扰;其次音视频线、存储线以及总线均形成多重屏蔽效果,能够实现高保真信号传输效果。
62.各位技术人员须知:虽然本发明已按照上述具体实施方式做了描述,但是本发明的发明思想并不仅限于此发明,任何运用本发明思想的改装,都将纳入本专利专利权保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1