一种高压接地线安装装置的制作方法
1.本实用新型涉及电力安装领域,尤其涉及一种高压接地线安装装置。
背景技术:
2.高压接地线是将已停电设备临时短路接地用的一种安全用具,其作用是对高压设备进行停电检修或进行其他工作时,防止设备突然来电和邻近高压带电设备产生感应电压对人体的危害,同时泄放断电设备的剩余电荷,按照相关电力行业规范每根导线靠近杆塔端,都需要预留安装接地线夹方便检修时搭接地线。而目前很多使用的配网线路,都未安装接地线夹,需要人工带电补安装。人工安装接地线夹属于高空作业和带电作业范畴,存在极大的安全隐患。
3.目前在带电导线上加装接地线夹方法为利用绝缘斗臂车将工人输送至近导线端,操作工人穿好绝缘屏蔽服,利用夹具和扭力扳手等工具徒手安装。从操作上来说受到空间、高空作业环境等影响,难度系数较大。
4.例如,一种在中国专利文献上公开的“一种穿刺接地线夹安装机器人”,其公开号:cn210789936u,授权公告日:2020-06-19,包括有底座和电机支架,所述电机支架固定安装在底座上,底座上固定安装有升降台,电机支架上安装悬臂导向机构和携带穿刺接地线夹的线夹器,所述线夹器与升降台通过连杆实现联动;臂导向机构包括有至少两个行走轮、与行走轮数量匹配的导向钩以及第一电机,第一电机安装在电机支架上,第一电机的输出轴与一个行走轮传动连接,行走轮安装在导向钩上。该发明通过吊装绝缘绳绕过目标带电导线的方式进行升降,这样会使得安装效率和安装精确度大大降低,且会对导线产生摩擦消耗功率。
技术实现要素:
5.本实用新型主要解决作业人员在带电环境下安装配网输电线路接地线夹时人员安全问题和操作复杂等问题;提供一种高压接地线安装装置。
6.本实用新型的上述技术问题主要是通过下述技术方案得以解决的:
7.本实用新型包括机器人上平台、绝缘细绳、升降模块和主体模块,所述机器人上平台通过所述绝缘细绳与所述升降模块连接,所述升降模块与所述主体模块两端固定连接。采用本方案可以远程控制机器安装接地线夹,能保证人员的安全。
8.作为优选,所述机器人上平台包括横杆、导向钩和从动轮,所述横杆两端都固定连接有一个导向钩,所述导向钩底座与所述绝缘细绳连接,所述从动轮安装在导向钩上。采用此方案是为了先将机器人上平台挑装到目标导线,再将机器人主体上升到导线位置进行安装接地线夹。
9.作为优选,所述升降模块包括卷线器,所述卷线器安装在主体模块两端的下方,所述卷线器正上方中间位置设有一小孔。采用本方案是为了通过卷线器将机器人主体上升到导线附近。
10.作为优选,所述主体模块包括控制器、电机、接地线夹限位座、集线器、主体外壳和主动轮,所述主体外壳的两端上平面均安装有所述集线器,所述接地线夹限位座安装在所述主体外壳上平面中间位置,所述主动轮安装在所述接地线夹限位座和集线器中间,所述控制器和电机设置在所述主体外壳内,所述控制器与所述电机电连接。采用本方案是为了可以远程控制机器人安装接地线夹。
11.作为优选,所述主动轮表面设有凹凸条纹。采用本方案是为了可以使机器人在导线上进行移动,到合适位置安装接地线夹。
12.作为优选,所述接地线夹限位座包括螺栓头端线夹限位座、螺栓尾端线夹限位座和挂环限位壳,所述螺栓头端线夹限位座和螺栓尾端线夹限位座对立设置,所述挂环限位壳设置在螺栓头端线夹限位座和螺栓尾端线夹限位座中间位置平面的下方。采用本方案是为了更好的安装接地线夹,提高安装效率。
13.作为优选,所述卷线器上方还安装有阻块。采用本方案是为了利用阻块与导向钩底部接触,则说明机器人主体已经上升到了最终位置,同时也能让导线放入接地线夹夹紧的位置。
14.作为优选,所述螺栓头端线夹限位座一侧还安装有若干个安装工作头,所述安装工作头的一端安装有六角套筒。采用本方案是为了紧固接地线夹上的力矩螺栓。
15.作为优选,所述挂环限位壳包括内层壳体和外层壳体,所述内层壳体设置在所述外层壳体内,所述内层壳体和外层壳体通过一绳连接,所述外层壳体与主体外壳固定连接。采用本方案是为了便于固定和脱离接地线夹。
16.本实用新型的有益效果是:
17.1.带电安装接地线夹机器人可以代替工人进入高压电场,自动上下导线,并可自主在导线上完成行走、定位、安装接地线夹等系列工作;整个过程中操作人员无需进入电场,只需使用绝缘杆挑装机器人的轻质上平台至导线,然后在地面可完成剩下操作过程;
18.2.无需借助绝缘斗臂车等大型设备,能覆盖大部分复杂地形,适用性强;
19.3.机器人借助可靠的夹具定位以及同步紧固两个线夹螺栓的安装策略,保证了安装质量的一致性。
附图说明
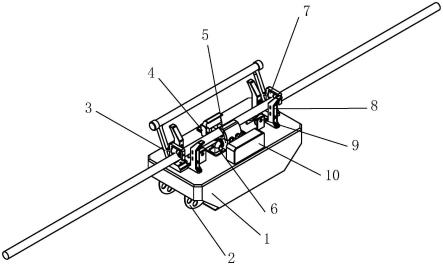
20.图1是本实用新型的结构图。
21.图中1.主体外壳,2.卷线器,3.导向钩,4. 螺栓尾端线夹限位座,5. 螺栓头端线夹限位座,6. 挂环限位壳,7. 从动轮,8. 集线器,9. 主动轮,10. 安装工作头。
具体实施方式
22.下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
23.实施例:
24.本实施例的一种高压接地线安装装置,如图1所示,包括机器人上平台和机器人主体,机器人上平台包括横杆、导向钩3和从动轮7,横杆两端都固定连接有一个导向钩3,导向钩3底座与绝缘细绳连接,从动轮7安装在导向钩3上。机器人主体包括控制器、电机、主体外壳1、卷线器2、螺栓尾端线夹限位座4、螺栓头端线夹限位座5、挂环限位壳6、集线器8、主动
轮9和安装工作头10,卷线器2安装在主体外壳1两端的下方,导向钩3底部通过绝缘细绳与卷线器2连接,卷线器2正上方中间位置设有一小孔,其上方还安装有阻块。主体外壳1的两端上平面各安装有一个集线器8,集线器8包括两根绝缘支架,绝缘支架之间设有空隙,绝缘支架上端越往上厚度越小且向外倾斜,并构成一个“y”字形。螺栓头端线夹限位座5、螺栓尾端线夹限位座4、和挂环限位壳6设置在主体外壳1上平面中间位置,螺栓头端线夹限位座5和螺栓尾端线夹限位座4对立设置,挂环限位壳6设置在螺栓头端线夹限位座5和螺栓尾端线夹限位座4中间位置平面的下方。挂环限位壳6包括内层壳体和外层壳体,内层壳体和外层壳体都是绝缘的,内层壳体设置在外层壳体内,内层壳体和外层壳体通过一绳连接,内层壳体可在外层壳体内上下移动,外层壳体与主体外壳1固定连接。螺栓头端线夹限位座5一侧还安装有2个安装工作头10,安装工作头10一端安装有六角套筒,六角套筒正对着接地线夹的力矩螺栓。主动轮9安装在所述接地线夹限位座和集线器8中间,主动轮9与电机电连接,主动轮9表面设有凹凸条纹。控制器和电机设置在主体外壳1内,控制器与电机电连接,卷线器2、主动轮9、安装工作头10和都与电机电连接。
25.操作时,作业人员首先将接地线夹的螺栓头端线夹安装在螺栓头端线夹限位座5上,将接地线夹的螺栓尾端线夹安装在螺栓尾端线夹限位座4上,将接地线夹的挂环安装在挂环限位壳6内,作业人员通过控制控制器给机器人下达指令。作业人员爬至横担以下安全距离外,利用绝缘杆将机器人上平台挑装到目标导线。作业人员给控制器下达上升指令,控制器接收到指令后,启动电机,电机给卷线器2输出动力,卷线器2开始工作,将绝缘细绳收卷,机器人主体开始上升。当阻块与导向钩3底部接触时,机器人主体已无法再上升,卷线器2也无法再进行收卷绝缘细绳,则卷线器2停止工作。此时从动轮7与导线接触且位于导线上方。同时集线器8会将导线导入到其中间的狭窄空隙中,主动轮9也会与导线接触且位于导线下方。卷线器2停止工作后,将会给控制器传递上升停止信号,控制器接收到上升停止信号后,将控制从动轮7和主动轮9对导线就形成了上下夹持的状态,电机为主动轮9提供动力并利用夹紧后材料提供的弹力为主动轮的行走提供摩擦力,从动轮7是可以灵活滚动的。
26.作业人员可控制机器人在导线上移动,作业人员下达安装指令,控制器收到指令后会再次启动电机,通过电机控制安装工作头10上的六角套筒同步旋转,紧固接地线夹的2个力矩螺栓,在螺栓收紧的作用下,两片线夹开始继续合拢,刀片开始刺破导线绝缘层。待刀片完全刺入接触导线,力矩达到设定值时,螺栓上的螺母力矩机构断裂脱落,主线和支线被接通。刀片穿刺过程中,垂直角度刺入是最佳的。
27.机器人安装好接地线夹后,控制机器人主体下移,此时接地线夹的挂环与内层壳体通过内部卡扣依然结合在一起。挂环内外壳体通过细绳连接,机器人继续往下,挂环上的内层壳体被绳子拽下。接地线夹留在导线上,安装完成。当机器人下降至地面后,作业人员爬至横担以下安全距离外,利用绝缘杆将机器人上平台从导线上取下。
28.本实施例使用机器代替人工带电高空作业,极大程度减少跌落、触电伤亡事故发生。机器人轻便便携,上下线方便无需依靠吊装设备。适用范围广泛节省人力物力,机动性好。
29.应理解,实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1