机器人的制作方法
1.本公开涉及机器人技术领域,尤其涉及一种机器人。
背景技术:
2.随着科学技术和人工智能的不断发展进步,机器人作为一种新型的产业逐渐走向了人们的生活中,其应用越来越广。为了能够对机器人进行调试诊断,满足机器人售后fa(failure analysis,失效分析)需求,机器人通常配备对外的调试口。市场上的调试口多为单一的物理接口,或者是多个物理接口。然而,对于单一的物理接口,由于机器人整机通常是多系统的,单一的物理接口无法精确地定位整机内部每一个系统的问题。而对于调试口为多个物理接口的设计,无疑会导致调试口的尺寸较大,影响到机器人的工业美观。
技术实现要素:
3.本说明书实施方式提供一种机器人,能够提供一种具有多功能的调试口,同时,调试口尺寸较小,具有良好的工业美观效果。
4.本说明书实施方式的一个方面提供一种机器人。所述机器人包括主控系统、与所述主控系统通讯连接的交互系统、以及与所述主控系统通讯连接的驱动系统,所述机器人还包括用于对外调试诊断的对外连接器,其中,所述主控系统、所述交互系统及所述驱动系统分别通讯连接至所述对外连接器。
5.进一步地,所述对外连接器为type c接口,所述对外连接器具有第一排管脚和第二排管脚,所述第一排管脚与所述第二排管脚相同且管脚排布相互反向一一对应以用于支持正反插。
6.进一步地,所述机器人包括主控板、交互板以及调试口主板,其中,所述主控系统和所述驱动系统分别设置于所述主控板上,所述交互系统设置于所述交互板上,所述对外连接器设置于所述调试口主板上。
7.进一步地,所述主控板具有第一接口和第二接口,所述主控系统连接至所述第一接口,所述驱动系统连接至所述第二接口,所述交互板具有第三接口,所述交互系统连接至所述第三接口,所述第一接口、所述第二接口和所述第三接口分别连接至所述对外连接器。
8.进一步地,所述第一接口包括wlan网口,所述第二接口包括can口,所述第三接口包括usb接口。
9.进一步地,所述调试口主板上还包括第一对内连接器和第二对内连接器,所述第一对内连接器和所述第二对内连接器分别连接至与所述对外连接器,所述第一对内连接器还分别连接至所述主控系统的所述第一接口和所述驱动系统的所述第二接口,所述第二对内连接器还连接至所述交互板的所述第三接口。
10.进一步地,所述第一对内连接器和所述第二对内连接器通过所述调试口主板上的pcb走线与所述对外连接器连接。
11.进一步地,所述机器人还包括第一线缆连接器,所述第一对内连接器通过所述第
一线缆连接器分别连接至所述主控系统的所述第一接口和所述驱动系统的所述第二接口,所述第一线缆连接器的第一端包括分别用于与所述第一接口和所述第二接口相对接的第一匹配端口和第二匹配端口,所述第一对内连接器为第一插座连接器,所述第一线缆连接器的第二端包括用于与所述第一插座连接器相插接的第一插头连接器。
12.进一步地,所述机器人还包括第二线缆连接器,所述第二对内连接器通过所述第二线缆连接器连接至所述交互板的所述第三接口,所述第二线缆连接器的第一端包括用于与所述第三接口相对接的第三匹配端口,所述第二对内连接器为第二插座连接器,所述第二线缆连接器的第二端包括用于与所述第二插座连接器相插接的第二插头连接器。
13.进一步地,所述主控系统包括x86系统,所述交互系统包括安卓系统,所述驱动系统包括mcu系统。
14.本说明书一个或多个实施方式的机器人能够将主控系统、交互系统及驱动系统都通讯连接至一个对外连接器,提供了一种具有多功能的调试口,通过一个调试口即可进行主控系统、交互系统及驱动系统中每一个系统的故障定位。本说明书一个或多个实施方式的机器人通过对外连接器能够快速精确地定位内部每一个系统的失效问题。
15.另外,本说明书一个或多个实施方式的机器人采用这种多功能的调试口的设计,调试口尺寸可以做得较小,因此,具有良好的工业美观效果。
附图说明
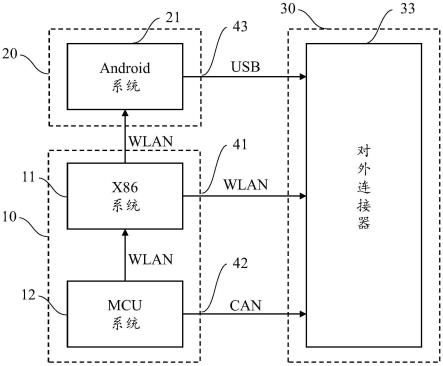
16.图1为本说明书一个实施方式的机器人的示意性系统框图;
17.图2为本说明书一个实施方式的第一对内连接器的示意图;
18.图3为本说明书一个实施方式的第二对内连接器的示意图;
19.图4为本说明书一个实施方式的对外连接器的示意图。
具体实施方式
20.这里将详细地对示例性实施方式进行说明。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。示例性实施方式中所描述的实施方式并不代表与本说明书相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所限定的、本说明书的一些方面相一致的装置的例子。
21.在本说明书实施方式使用的术语是仅仅出于描述特定实施方式的目的,而非旨在限制本说明书。除非另作定义,本说明书实施方式使用的技术术语或者科学术语应当为本说明书所属领域内具有一般技能的人士所理解的通常意义。本说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“多个”或者“若干”表示两个及两个以上。“包括”或者“包含”等类似词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而且可以包括电性的连接,不管是直接的还是间接的。在本说明书和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个
或多个相关联的列出项目的任何或所有可能组合。
22.本说明书的一个实施方式提供了一种机器人。图1揭示了本说明书一个实施方式的机器人的示意性系统框图。如图1所示,本说明书一个实施方式的机器人包括主控系统11、交互系统21以及驱动系统12。
23.主控系统11例如可以包括但不限于x86系统。主控系统11一般用于主控导航计算中心,负责机器人的行动及计算导航等。
24.交互系统21例如可以包括但不限于android(安卓)系统。交互系统21可以与主控系统11通讯连接。在一个实施方式中,交互系统21与主控系统11通过wlan(wireless local area network,无线局域网)进行通讯连接。交互系统21一般用于机器人与外部的交互使用。
25.驱动系统12例如可以包括但不限于mcu(microcontroller unit,微控制单元)系统。驱动系统12与主控系统11通讯连接。在一个实施方式中,驱动系统12与主控系统11通过wlan进行通讯连接。驱动系统12一般用于电源管理和传感器信息控制等。
26.继续参照图1所示,本说明书一个实施方式的机器人还包括用于对外调试诊断的对外连接器33。其中,主控系统11、交互系统21及驱动系统12分别通讯连接至对外连接器33。对外连接器33可以设置在机器人的机身外部,对外开放。本说明书实施方式的对外连接器33可以作为机器人的一个统一的对外调试口,用于对机器人进行外部调试诊断,方便对机器人进行售后失效分析。
27.本说明书实施方式的机器人能够将主控系统11、交互系统21及驱动系统12都通讯连接至一个对外连接器33,提供了一种具有多功能的调试口,通过一个调试口即可进行主控系统11、交互系统21及驱动系统12中每一个系统的故障定位,同时,采用这种多功能的调试口的设计,调试口尺寸可以做得较小,因此,具有良好的工业美观效果。
28.机器人的内部包括主控板10、交互板20以及调试口主板30。其中,主控系统11和驱动系统12分别设置于主控板10上,交互系统21设置于交互板20上,对外连接器33设置于调试口主板30上。在一些实施方式中,主控板10具有第一接口41和第二接口42,主控系统11连接至第一接口41,驱动系统12连接至第二接口42。交互板20具有第三接口43,交互系统21连接至第三接口43。第一接口41、第二接口42和第三接口43分别连接至对外连接器33,从而,分别通过第一接口41、第二接口42和第三接口43,将主控系统11、驱动系统12和交互系统21分别连接至对外连接器33。
29.在一个实施方式中,对于调试诊断需求,主控系统11一般选择网口,因此,第一接口41包括wlan网口。
30.在一个实施方式中,对于调试诊断需求,驱动系统12一般选择can(controller area network,控制器局域网络),因此,第二接口42包括can口。
31.在一个实施方式中,对于调试诊断需求,交互系统21一般选择usb(universal serial bus,通用串行总线)接口,因此,第三接口43包括usb接口。
32.在一些实施方式中,调试口主板30上可以包括第一对内连接器31(如图2所示)和第二对内连接器32(如图3所示),第一对内连接器31和第二对内连接器32分别连接至与对外连接器33。例如,对外连接器33可以设置于调试口主板30的一侧面,而第一对内连接器31和第二对内连接器32可以设置于调试口主板30的相对的另一侧面,第一对内连接器31和第
二对内连接器32位于机器人的内部。第一对内连接器31和第二对内连接器32可以通过调试口主板30上的pcb(printed circuit board,印制电路板)走线与对外连接器33连接。第一对内连接器31还分别连接至主控系统11的第一接口41和驱动系统12的第二接口42,第二对内连接器32还连接至交互板20的第三接口43。
33.图2揭示了本说明书一个实施方式的第一对内连接器31的示意图。如图2所示,在一个实施方式中,第一对内连接器31包括八个管脚,第1管脚为tx+,第2管脚为tx-,第3管脚为rx+,第4管脚为rx-,第5和第6管脚接地,第7管脚为can_h,第8管脚为can_l。其中,第1管脚至第4管脚用于网络传输,用于连接至主控板10的wlan网口,第7管脚和第8管脚用于连接至主控板10的can口。
34.图3揭示了本说明书一个实施方式的第二对内连接器32的示意图。如图3所示,在一个实施例中,第二对内连接器32包括四个管脚,第1管脚为vbus,第2管脚为d+,第3管脚为d-,第4管脚为gnd_usb。其中,第1管脚用于提供电压,第2管脚和第3管脚为数据管脚,第4管脚为接地管脚,第二对内连接器32中的第1管脚至第4管脚分别与交互板20上的usb接口中的对应管脚连接。
35.图4揭示了本说明书一个实施方式的对外连接器33的示意图。如图4所示,在一些实施方式中,对外连接器33可以为一种type c接口。对外连接器33具有第一排管脚和第二排管脚,第一排管脚与第二排管脚相同且管脚排布相互反向一一对应以用于支持正反插。例如,第一排管脚从上至下依次为管脚a1-a12,其中,管脚a1为gnd_usb,管脚a2为tx+,管脚a3为tx-,管脚a4为vbus,管脚a5为can_h,管脚a6为d+,管脚a7为d-,管脚a8为can_l,管脚a9为vbus,管脚a10为rx-,管脚a11为rx+,管脚a12为gnd_usb。第二排管脚从上至下依次为管脚b12-b1,其中,管脚b12为gnd_usb,管脚b11为rx+,管脚b10为rx-,管脚b9为vbus,管脚b8为can_l,管脚b7为d-,管脚b6为d+,管脚b5为can_h,管脚b4为vbus,管脚b3为tx-,管脚b2为tx+,管脚b1为gnd_usb。第一排管脚a1-a12与第二排管脚b12-b1反向对称排布,从而保证了type c接口的正反插功能都能兼容。并且,本说明书实施方式将wlan网口,usb接口,can口都集成在type c接口,type c接口一出三,可以兼容多种协议接口设计,而且,type c接口很小巧,不会影响机器人的工业美观。
36.需要说明的是,以上图4所示的type c接口的第一排管脚和第二排管脚的排布顺序并不限于图4所示,实际上,可以根据实际需要来进行管脚的灵活排布。
37.在一些实施方式中,本说明书实施方式的机器人还包括第一线缆连接器(未图示)和第二线缆连接器(未图示)。第一对内连接器31通过第一线缆连接器分别连接至主控系统11的第一接口41和驱动系统12的第二接口42,第二对内连接器32通过第二线缆连接器连接至交互板20的第三接口43。
38.例如,第一线缆连接器的第一端包括分别用于与第一接口41和第二接口42相对接的第一匹配端口和第二匹配端口,第一对内连接器31为第一插座连接器,第一线缆连接器的第二端包括用于与第一插座连接器相插接的第一插头连接器。从而,通过第一线缆连接器,将第一接口41和第二接口42连接至第一对内连接器31,进而将主控系统11和驱动系统12连接至第一对内连接器31。第一对内连接器31连接对外连接器33,因此,继而将主控系统11和驱动系统12连接至对外连接器33。
39.第二线缆连接器的第一端包括用于与第三接口43相对接的第三匹配端口,第二对
内连接器32为第二插座连接器,第二线缆连接器的第二端包括用于与第二插座连接器相插接的第二插头连接器。从而,通过第二线缆连接器,将第三接口43连接至第二对内连接器32,进而将交互系统21连接至第二对内连接器32。第二对内连接器32连接对外连接器33,因此,继而将交互系统21连接至对外连接器33。
40.本说明书实施方式的机器人在售后诊断时,还可以配备将type c接口转usb接口的接头、type c接口转wlan网口的接头、以及type c接口转can口的接头,从而,通过使用这些接头,可以快速精确地定位机器人内部的每一个系统的失效问题。
41.返回参照图1所示,当本说明书实施方式的机器人在售后调试诊断时,例如当机器人中的x86系统与android系统之间的网线断掉或者x86系统本身出现问题时,则售后维修人员通过对外连接器33,将无法通过x86系统来访问android系统,而只能通过usb接口来访问android系统。类似地,当机器人中的mcu系统与x86系统之间的网线断掉或者mcu系统本身出现问题时,则售后维修人员通过对外连接器33,将无法通过mcu系统来访问x86系统,而只能通过wlan网口来访问x86系统。只能通过can口来访问mcu系统。因此,可以精确地定位每一个系统的问题。
42.本说明书实施方式的机器人提供了一种具有多功能的调试口,同时,调试口尺寸较小,具有良好的工业美观效果。
43.以上实施方式的说明只是用于帮助理解本说明书的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本说明书的精神和原理的前提下,还可以对本说明书进行若干改进和修饰,这些改进和修饰也均应落入本说明书所提出的权利要求书的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1