基板清洗线及包括该基板清洗线的基板清洗系统的制作方法
1.以下的实施例涉及一种基板清洗线及包括该基板清洗线的基板清洗系统。
背景技术:
2.通常,半导体是反复进行光刻、蒸镀及蚀刻等一系列工艺而制造出来的。由于反复的工艺,在构成这些半导体的基板的表面残存有各种颗粒、金属杂质或有机物等污染物。基板上残存的污染物会使得制造出来的半导体的可靠性降低,因此为了改善这一现象,在半导体制造工艺中要求进行清洗基板的工艺。
3.另一方面,根据工艺配方,清洗药液的处理顺序可能会发生变化。在这种情况下,问题在于,如果变更供应到喷嘴的药液,喷嘴可能会受到污染。因此,实情是需要一种具有在不变更供给的药液的同时可灵活地变更腔室的移动顺序的结构的基板清洗线及包括该基板清洗线的基板清洗系统。
4.前述的背景技术是发明者在导出本技术的公开内容的过程中拥有或掌握的,并不一定是在本技术前向一般公众公开的公知技术。
技术实现要素:
5.根据一个实施例的目的在于提供一种基板清洗线及包括该基板清洗线的基板清洗系统,其能够变更腔室的移送顺序,并灵活地应对工艺。
6.根据一个实施例的目的在于提供一种基板清洗线及包括该基板清洗线的基板清洗系统,其提供基板的有效动线。
7.根据一个实施例的目的在于提供一种基板清洗线及包括该基板清洗线的基板清洗系统,其能够快速清洗基板。
8.根据一个实施例的目的在于提供一种基板清洗线及包括该基板清洗线的基板清洗系统,其能够有效应对故障。
9.根据一个实施例的基板清洗线,包括:腔室部,其包括用于清洗基板的多个清洗腔室;以及第一搬运机器人,其将基板相对于多个清洗腔室搬入、搬出或移送;多个清洗腔室可分别沿垂直方向叠层。
10.腔室部可包括:第一腔室部;及第二腔室部,其沿水平方向与第一腔室部隔开配置。
11.第一搬运机器人可配置在第一腔室部及第二腔室部之间。
12.第一搬运机器人可沿垂直及水平方向移动,能够以垂直于地面的轴为中心旋转。
13.第一腔室部可包括第一清洗腔室、第二清洗腔室及第三清洗腔室,第二腔室部可包括第四清洗腔室及第五清洗腔室。
14.第一清洗腔室、第二清洗腔室及第三清洗腔室可从下侧向上侧依次叠层,第四清洗腔室及第五清洗腔室可从上侧向下侧依次叠层。
15.第一搬运机器人可按第一清洗腔室、第二清洗腔室、第三清洗腔室、第四清洗腔室
及第五清洗腔室的顺序移送基板。
16.第一搬运机器人可按第一清洗腔室、第三清洗腔室、第二清洗腔室、第四清洗腔室及第五清洗腔室的顺序移送基板。
17.根据一个实施例的基板清洗系统,可包括:至少一个基板清洗线;以及第二搬运机器人,其将已研磨的基板移送至基板清洗线。
18.基板清洗线可包括沿水平方向隔开配置的第一基板清洗线及第二基板清洗线。
19.第二搬运机器人可配置于第一基板清洗线和第二基板清洗线之间。
20.如果第一基板清洗线和第二基板清洗线中的某一个发生故障,则第二搬运机器人可将已研磨的基板移送至另一个基板清洗线。
21.第二搬运机器人可将已研磨的基板移送至基板清洗线的多个清洗腔室中的任意一个。
22.基板清洗线还包括移送台,其用于接收已研磨的基板的移送,第二搬运机器人可将已研磨的基板移送至移送台。
23.移送台可位于多个清洗腔室中相邻的两个清洗腔室之间。
24.根据一个实施例的目的在于可通过变更腔室的移送顺序而灵活地应对工艺。
25.根据一个实施例的基板清洗线及包括该基板清洗线的基板清洗系统可有效地清洗基板。
26.根据一个实施例的基板清洗线及包括该基板清洗线的基板清洗系统能够有效地应对故障。
附图说明
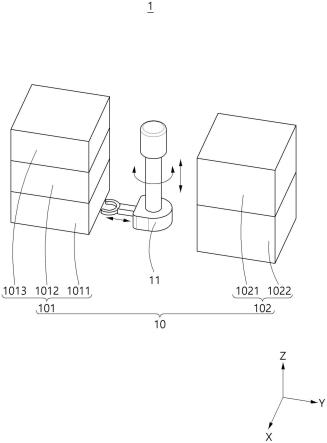
27.图1是根据一个实施例的基板清洗线的概略立体图。
28.图2是用于示出根据一个实施例的基板的清洗过程的基板清洗线的概略侧面图。
29.图3是根据一个实施例的基板清洗系统的概略平面图。
30.图4是根据一个实施例的第一腔室部及第二搬运机器人的概略图。
31.标号说明
32.1:基板清洗线
33.10:腔室部
34.11:第一搬运机器人
35.12:移送台
36.2:基板清洗系统
37.20:第二搬运机器人
具体实施方式
38.以下,参照附图对实施例进行详细的说明。但是,由于实施例可进行多种变更,因此专利申请的权利范围并不受这些实施例的限制或限定。而是应当理解为对实施例进行的所有变更、均等物乃至替代物包含于权利范围内。
39.实施例中使用的术语仅用于说明目的,不应被解释为想要限定的意图。单数的表达包括多数的表达,除非上下文中有明显不同的意思。在本说明书中,“包括”或“具有”等术
语应理解为要指定说明书中所记载的特征、数字、步骤、动作、构成要素、元件或它们组合的存在,不是事先排除一个或一个以上的其他特征或数字、步骤、动作、构成要素、元件或它们组合的存在或者附加可能性。
40.除非另有定义,否则包括技术的或科学的术语在内,在这里使用的所有术语都与在实施例所属的技术领域中具有一般知识的人通常所理解的含义具有相同的意义。通常使用的词典中定义的那些术语,应解释为具有与在相关技术的上下文中所具有的含义一致的意义,除非在本技术中明确定义,否则不能解释为理想的或过于形式上的意思。
41.另外,在参照附图进行说明时,不管附图标号如何,同一构成要素赋予相同的参照标号,并省略其重复的说明。在说明实施例时,当判断对相关的公知技术的具体的说明可能会不必要地模糊实施例的要旨时,将省略其详细的说明。
42.另外,在说明实施例的构成要素时,可以使用第一、第二、a、b、(a)、(b)等术语。这些术语只是为了将该构成要素与其他构成要素区别开来,并不因该术语而限制相关构成要素的本质或顺序或步骤等。当某个构成要素被记载为“连接”、“结合”或“接入”于其他构成要素时,应理解为虽然该构成要素可以直接连接或接入于其他构成要素,但在各构成要素之间也可以“连接”、“结合”或“接入”有另外的构成要素。
43.在某一个实施例中包含的构成要素和包含共同功能的构成要素,在其他实施例中使用相同的名称来进行说明。如果没有相反的记载,任何一个实施例中记载的说明都可以适用于其他实施例,并在重复的范围内省略具体说明。
44.图1是根据一个实施例的基板清洗线1的概略立体图。
45.参照图1,根据一个实施例的基板清洗线1可用于对已研磨的基板进行清洗的基板清洗工艺。根据一个实施例,基板清洗线1可包括腔室部10及第一搬运机器人11。
46.基板(未示出)可以是成为半导体基板的硅晶片。但是,本实用新型并不限于此,基板可以是液晶显示器(liquid crystal display,lcd)和等离子显示板(plasmadisplay panel)等平板显示装置用的玻璃基板。另外,基板形状及大小不限,实际上可具有圆形及四边形板等多种形状和大小。
47.腔室部10可提供对基板进行清洗工艺的空间。基板清洗工艺可包括清洗基板的工艺和干燥基板的工艺。在一个实施例中,腔室部10可形成有多个。例如,腔室部10可包括第一腔室部101和沿水平方向与第一腔室部101隔开配置的第二腔室部102。但是,这是示例性的,腔室部10的数量并不限于此。
48.在一个实施例中,腔室部10可包括用于清洗基板的清洗腔室。在清洗腔室内部可设置有供应用于清洗基板的清洗液的喷嘴。在一个实施例中,清洗腔室可形成多个。例如,腔室部10可包括第一清洗腔室1011、第二清洗腔室1012、第三清洗腔室1013、第四清洗腔室1021、第五清洗腔室1022。另外,可在第一清洗腔室1011、第二清洗腔室1012、第三清洗腔室1013、第四清洗腔室1021、第五清洗腔室1022分别设置供应不同种类的清洗液的喷嘴。在一个实施例中,第一腔室部101可包括第一清洗腔室1011、第二清洗腔室1012、第三清洗腔室1013,第二腔室部102可包括第四清洗腔室1021及第五清洗腔室1022。但是,这是示例性的,腔室的数量及配置并不限于此。在一个实施例中,多个清洗腔室可分别沿垂直方向叠层。例如,第一腔室部101的第一清洗腔室1011、第二清洗腔室1012、第三清洗腔室1013可以以地面为基准从下侧到上侧(例如:+z轴方向) 依次层叠。另外,第二腔室部102的第四清洗腔室
1021及第五清洗腔室1022可以以地面为基准从上侧到下侧(例如:-z轴方向)依次叠层。
49.第一搬运机器人11可将基板相对于多个清洗腔室搬入、搬出或移送。在一个实施例中,第一搬运机器人11可支撑基板的下面。例如,第一搬运机器人11可包括用于通过夹住基板来稳定地移送的抓握部。在一个实施例中,第一搬运机器人11可配置在第一腔室部和第二腔室部102之间。例如,第一腔室部101、第一搬运机器人11及第二腔室部102可配置于一条直线上。但是,这是示例性的,腔室部10及第一搬运机器人11的配置并不限于此。例如,当腔室部10设置有多个时,多个腔室部10可沿着第一搬运机器人11的周围方向隔开配置。
50.在一个实施例中,第一搬运机器人11可沿垂直和水平方向移动,并且可以以垂直于地面的轴为中心旋转。因此,第一搬运机器人11可自由地接近沿垂直方向叠层的多个清洗腔室,也可自由地接近沿水平方向隔开配置的第一腔室部101和第二腔室部102。
51.图2是用于示出根据一个实施例的基板的清洗过程的基板清洗线1的概略侧面图。
52.参照图2,根据一个实施例的基板清洗线1可利用第一搬运机器人11从多个腔室部 10清洗基板。
53.在一个实施例中,清洗腔室至少可在一个方向上设置出入口(未示出),以便可使得基板进出。在一个实施例中,第一搬运机器人11可将基板搬入第一清洗腔室1011、第二清洗腔室1012、第三清洗腔室1013、第四清洗腔室1021、第五清洗腔室1022中的任意一个地方。另外,在清洗腔室内清洗基板期间,第一搬运机器人11可待机。并且,当在清洗腔内完成基板清洗时,第一搬运机器人11可搬出基板,可将基板移送到第一清洗腔室1011、第二清洗腔室1012、第三清洗腔室1013、第四清洗腔室1021、第五清洗腔室1022中的另外一个地方。例如,如图2的(a)所示,第一搬运机器人11可按第一清洗腔室1011、第二清洗腔室1012、第三清洗腔室1013、第四清洗腔室1021及第五清洗腔室的1022的顺序移送基板。另外,如图2的(b)所示,第一搬运机器人可按第一清洗腔室1011、第三清洗腔室1013、第二清洗腔室1012、第四清洗腔室1021及第五清洗腔室1022的顺序移送基板。因此,当根据清洗工艺变更暴露于基板的清洗液的顺序时,可以在不变更清洗腔室或清洗液的位置的情况下,通过变更基板被移送的路径来进行清洗工艺。但是,在图2的(a)和(b)中的实施例只是一个示例,并不限于此。例如,第一搬运机器人11可以按多种顺序经由多个清洗腔室。另一方面,可固定开始清洗工艺的清洗腔室和结束清洗工艺的清洗腔室的位置。例如,清洗工艺可以从第一清洗腔室1011开始到第五清洗腔室1022结束。
54.图3是根据一个实施例的基板清洗系统2的概略平面图。
55.参照图3,根据一个实施例的基板清洗系统2可用于清洗已研磨的基板的基板清洗工艺。根据一个实施例,基板清洗系统2可包括基板清洗线(例如:图1的基板清洗线1)和第二搬运机器人20。
56.在一个实施例中,基板清洗线1可设置有多个。例如,基板清洗线1可包括第一基板清洗线1a和第二基板清洗线1b。第一基板清洗线1a和第二基板清洗线1b可相对于地面在水平方向上隔开配置。例如,第一基板清洗线1a和第二基板清洗线1b可以以相互平行的形式配置。第一基板清洗线1a和第二基板清洗线1b与通过图1和图2说明的基板清洗线1实质上相同,因此省略了与此相关的具体内容。
57.第二搬运机器人20可将在研磨部已研磨的基板移送至基板清洗线1。在一个实施例中,第二搬运机器人20可支撑基板的下面。例如,第二搬运机器人20可包括用于通过夹住
基板来稳定地移送的抓握部。第二搬运机器人20可配置在第一基板清洗线1a和第二基板清洗线1b之间。第二搬运机器人20可包括臂,其以都可接近第一基板清洗线1a 和第二基板清洗线1b的形式旋转及/或延长。第二搬运机器人20可选择性地将在研磨部已研磨的基板移送至第一基板清洗线1a和第二基板清洗线1b中的任何一个。在一个实施例中,当第一基板清洗线1a和第二基板清洗线1b中的任何一个出现故障时,第二搬运机器人20可将已研磨的基板移送至另一个基板清洗线。例如,当第一基板清洗线 1a发生故障时,第二搬运机器人20只能将已研磨的基板从研磨部移送至第二基板清洗线1b。在一个实施例中,当清洗工艺结束时,第一搬运机器人11或第二搬运机器人20 可将已完成清洗的基板移送至设备前端模块(efem,equipment front end module)。
58.图4是根据一个实施例的第一腔室部101及第二搬运机器人20的概略图。
59.参照图4,根据一个实施例的第一腔室部101可通过第二搬运机器人20接收已研磨的基板的移送。
60.在一个实施例中,第二搬运机器人20可将已研磨的基板从研磨部移送至基板清洗线 1的多个清洗腔室中的任何一个。例如,在图4的(a)中,第二搬运机器人20可将已研磨的基板从研磨部移送至第一腔室部101的第一清洗腔室1011。但是,图4的(a) 只是为了便于理解的示例,从第二搬运机器人20接收基板的移送的地方并不限于第一清洗腔室1011。
61.在一个实施例中,基板清洗线1还可包括移送台12。在一个实施例中,第二搬运机器人20可将已研磨的基板从研磨部移送至移送台12。移送台12可以以与清洗腔室相邻的形式设置。另外,传送台12可位于多个清洗腔室中相邻的两个清洗腔室之间。例如,在图4的(b)中,移送台12可位于第一清洗腔室1011和第二清洗腔室1012之间。但是,图4的(b)只是为了便于理解的示例,无需限制移送台12位于第一清洗腔室1011 及第二清洗室1012之间。例如,移送台12也可位于第一清洗腔室1011的下侧。在一个实施例中,当第二搬运机器人20将已研磨的基板移送至移送台12时,第一搬运机器人11可将移送至移送台12的基板移送至多个清洗腔室中的任何一个。
62.如上所述,实施例虽然借助于有限的图进行了说明,但在相应的技术领域具有一般知识的人,可以在上述基础上进行多种技术修改和变形。例如,即使说明的技术按照与说明的方法不同的顺序来进行,以及/或者说明的系统、结构、装置、电路等构成要素以与说明的方法不同的形态结合或组合,或者被其他构成要素或均等物代替或置换,也可以实现适当的结果。
63.因此,其他体现、其他实施例以及与专利权利要求书均等的事项也属于权利要求书的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1