一种机器人充电对接系统的制作方法
1.本实用新型涉及机器人充电技术领域,尤其是指一种机器人充电对接系统。
背景技术:
2.随着科技的发展,越来越多机器人进入大众的视野,诸如银行,餐厅,医院等都能见到他们的身影,甚至有部分服务型机器人已经进入我们的家庭。因为服务型机器人绝大部分由蓄电池提供动力,因此,在日常的使用中,当机器人电量耗尽或将耗尽时,我们需将其移动回充电场所并为其充电,现有的机器人充电对接系统主要有两种:1.在机器人的正面车头设置圆棒状的充电公头,在地面支架上设置圆环状的充电母头,通过充电公头和充电母头的水平连接进行充电,此充电对接系统主要适用于形状方正的机器人,对于异形机器人来说,其正面或尾部依据服务需要设定为曲面或凹凸不平状,不易于安装充电公头,因此该充电对接系统不适用于异形机器人使用;2.在机器人底部设置电极片,在地面充电桩上设置电极头,机器人行驶至充电位置后,当电极片接触到电极头后电路导通,对机器人进行充电,然而通常为了为了降低充电位置的精度要求,保证充电对接成功率,电极片的尺寸设定较大而电极头的尺寸较小,电极片的尺寸通常为60x100mm,此充电对接系统适用于底部空间开阔且平整的机器人,对于一些底部结构紧凑或者体积较小的机器人来说,底部空间尤为重要,不适合也不会选择安装如此大尺寸的电极片;因此,对于异形且底部结构紧凑的机器人来说,现有常规的充电对接系统均不太适配。
技术实现要素:
3.为此,本实用新型所要解决的技术问题在于克服现有技术中充电对接系统与异形且底部结构紧凑的机器人不适配的问题,因此,有必要提供一种可适配异形且底部结构紧凑的机器人的充电对接系统。
4.为解决上述技术问题,本实用新型提供了一种机器人充电对接系统,包括:
5.机器人,其包括底板;
6.固定块,其设置于所述底板上;
7.电极头,其设置于所述固定块底端且穿设所述底板设置;
8.充电座,其用于为所述机器人充电;
9.电极片,其水平设置于所述充电座上,当所述机器人运行至所述充电座上方,所述电极头抵接所述电极片后,所述充电座为所述机器人充电;
10.其中,所述电极片的横截面积大于所述电极头的横截面积。
11.在本实用新型的一个实施例中,还包括弹簧,其用于复位所述电极头,所述弹簧抵接于所述电极头上方。
12.在本实用新型的一个实施例中,所述弹簧上方设置有压板,所述压板通过多根螺柱固定于所述固定块上。
13.在本实用新型的一个实施例中,所述充电座的边缘设置有斜坡,所述斜坡低于所
述电极片高度。
14.在本实用新型的一个实施例中,所述充电座上设置有限位块,所述限位块用于对所述机器人限位。
15.在本实用新型的一个实施例中,所述充电座的正面设置有标识部,所述标识部用于所述机器人定位所述充电座。
16.在本实用新型的一个实施例中,所述充电座上竖直设置有防撞部,所述防撞部用于防止所述机器人撞击所述充电座发生损坏。
17.在本实用新型的一个实施例中,所述电极头呈球状。
18.在本实用新型的一个实施例中,所述充电座呈l型。
19.在本实用新型的一个实施例中,所述电极片横截面积为60x100mm。
20.本实用新型的上述技术方案相比现有技术具有以下优点:
21.本实用新型所述的机器人充电对接系统:
22.1.通过将电极片水平设置,电极头设置在机器人底部,当电极头纵向抵接电极片后,充电座开始为机器人充电,机器人底部纵向通常留有车轮的高度空间,因此纵置的充电对接系统可以适配绝大多数机器人,尤其是异形机器人。
23.2.通过将大尺寸的电极片设置在充电座上,小尺寸的电极头设置在机器人底部,不仅适配绝大多数机器人,尤其对于底部结构紧凑或体积小巧的机器人来说也可适配。
附图说明
24.为了使本实用新型的内容更容易被清楚的理解,下面根据本实用新型的具体实施例并结合附图,对本实用新型作进一步详细的说明,其中
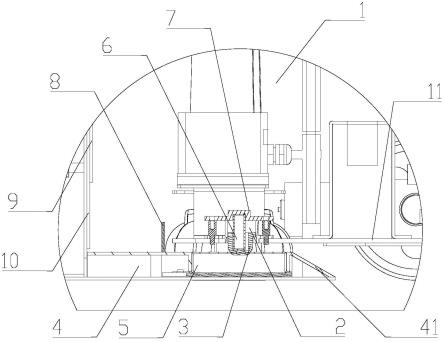
25.图1是本实用新型优选实施例中机器人充电对接系统的侧视剖面图;
26.图2是图1中机器人充电对接系统的俯视剖面图。
27.说明书附图标记说明:1、机器人;2、固定块;3、电极头;4、充电座; 5、电极片;6、弹簧;7、压板;8、限位块;9、标识部;10、防撞部;11、底板;41、斜坡。
具体实施方式
28.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
29.本实用新型的一种机器人充电对接系统优选的一实施例。
30.参照图1至图2所示,一种机器人充电对接系统,包括:
31.机器人1,其包括底板11,底板11的底部通常留有机器人1的车轮的高度空间。
32.固定块2,其通过多根螺柱固定于底板11上。
33.电极头3,其通常设置为球状,电极头3设置于固定块2底端且穿设底板11设置,此时电极头3凸出底板11并位于底板11底部的高度空间内,但电极头3凸出的高度不会高于底部的高度空间。
34.充电座4,其用于为机器人1充电,充电座4通常为l型设置。
35.电极片5,其横截面积通常设定为60x100mm,电极片5设置于充电座4 的水平端上,电极片5与电极头3为纵向接触,当机器人1运行至充电座4 上方,电极头3抵接电极片5后,
充电座4为所述机器人1充电。
36.其中,电极片5的横截面积大于电极头3的横截面积,可优化电极头3 与电极片5的对接难度,降低了对机器人1充电的位置精度要求,有效提高充电对接成功率。
37.具体的,还包括用于复位电极头3的弹簧6,弹簧6一端抵接在电极头 3的上方,使电极头3可以弹性纵向移动,弹簧6的另一端连接压板7,压板7通过多个螺栓固定在固定块2上,为了使电极头3与电极片5能够紧密接触,提高充电对接成功率,避免接触不良的情况,需要利用弹簧6的预紧力使电极头3与电极片5紧密贴合,当机器人1运行至充电座4的水平端上方时,电极头3竖直向上运动抵接电极片5后,压板7固定不动,此时弹簧 6被压缩,由于弹簧6的预紧力使得电极头3受到弹簧6的弹力,从而将电极头3紧紧的压在电极片5上,待充电完成后,机器人1运动离开充电座4,电极头3在弹簧6的作用下完成复位,另外,弹簧6的设置也使得该机器人 1可以适配不同高度的充电座4。
38.具体的,充电座4的边缘设置有斜坡41,斜坡41高度低于电极片5高度,斜坡41具有缓冲功能,电极片5本身具有一定高度,斜坡41的设置可以使得电极头3顺着斜坡41到达电极片5,并在弹簧6的作用下紧密抵接在电极片5上。
39.具体的,充电座4上设置有限位块8,限位块8用于对机器人1限位,限位块8选用柔性材料,如硅胶块等,限位块8设置于电极头3在电极片5 的前进方向上且位于电极片5外,机器人1运动至充电座4上方缓慢滑动,电极头3与电极片5抵接并导通后开始充电,但机器人1通常会由于惯性不会立即停止,还会继续往前运动一小段位移,当电极头3与电极片5无法导通时,机器人1持续前进可能会与充电座4的竖直端发生碰撞,限位块8用于防止机器人1出现上述情况时碰撞现象的发生。
40.具体的,充电座4的竖直端的正面设置有标识部9,用于机器人1定位充电座4,标识部9可以为异形造型的反光板,使得不同的机器人1选用与其设配的充电座4进行充电,避免充电系统不匹配的情况发生,提高充电效率。
41.具体的,充电座4上竖直设置有防撞部10,防撞部10用于防止机器人 1撞击充电座4发生损坏,防撞部10选用柔性材料,如缓冲棉等,当异形机器人1正面或尾部凸出时,在其充电对接过程中,机器人1凸出的部分可能会与充电座4的竖直端产生接触,为避免两者接触对彼此产生磨损等情况,柔性材料的防撞部10可在双方接触时提供接触位的保护,避免了互相摩擦产生磨损等情况的发生。
42.具体的,当机器人1需要进行充电时,机器人1运动至充电座4附近,对充电座4的标识部9进行识别,确认该充电座4为适配充电座4后,机器人1运动至充电座4的水平端上方,在斜坡41的导向作用下,电极头3顺利到达充电座4水平端上的电极片5,并在弹簧6的预紧力的作用下,电极头3紧密抵接在电极片5上,并在机器人1的带动下载电极片5上缓慢滑动,当电极头3与电极片5成功导通后,机器人1停止运动,充电座4开始为机器人1充电,待充电完成后,机器人1运动退出充电座4,电极头3在弹簧 6的作用下完成复位,如此反复,实现机器人1的反复充电。
43.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1