电池以及电池模组的制作方法
1.本技术涉及电池技术领域,具体涉及一种电池以及电池模组。
背景技术:
2.电池模组中的电池与电池之间一般通过汇流排进行电连接。电池的极柱与汇流排之间进行激光焊接时,通常需要依靠夹治具对极柱和汇流排进行定位。由于夹治具通常需要适配多种规格的极柱,因此夹治具与极柱之间往往预留有间隙而导致定位精度较低,并且夹治具多次重复装配使用而容易发生磨损,这进一步导致夹治具的定位精度较低。
技术实现要素:
3.本技术提供一种电池以及电池模组,能够提高电池的极柱与汇流排之间的定位精度,并且还能够提高电池的极柱与汇流排之间的焊接良率。
4.本技术提供一种电池模组。该电池模组包括至少两个电池,电池具有极柱;其中,极柱具有第一定位结构以及第一焊接区域,第一定位结构与第一焊接区域彼此间隔。该电池模组还包括汇流排,汇流排的相对两端分别具有第二定位结构以及第二焊接区域,第二定位结构与第二焊接区域彼此间隔。其中,汇流排两端的第二定位结构分别与相邻的电池上的第一定位结构配合连接,第一焊接区域与第二焊接区域相对焊接配合。
5.在本技术的一实施例中,电池模组具有高度方向,极柱沿高度方向延伸;第一焊接区域环设于第一定位结构的外周,且第一定位结构与第一焊接区域之间在垂直于高度方向的方向上彼此间隔;第二焊接区域环设于第二定位结构的外周,且第二定位结构与第二焊接区域之间在垂直于高度方向的方向上彼此间隔。
6.在本技术的一实施例中,第一定位结构与第一焊接区域之间的间距及第二定位结构与第二焊接区域之间的间距均为0.5mm至2mm。
7.在本技术的一实施例中,第一定位结构与第二定位结构中的一者包括定位柱,另一者包括定位孔,定位柱与定位孔配合插接,以固定电池与汇流排之间的相对位置。
8.在本技术的一实施例中,定位柱与定位孔中的一者凸设有凸部,另一者设有槽部,凸部与槽部凹凸嵌合设置,以限制极柱与汇流排之间的相对转动。
9.在本技术的一实施例中,凸部凸设于定位孔的孔壁;电池还包括:壳体,其上设有极柱;其中,定位柱具有背离壳体的目标端面,槽部自目标端面朝向壳体延伸。
10.在本技术的一实施例中,定位柱的数量及定位孔的数量均为至少两个,且两两定位柱之间彼此间隔,两两定位孔之间彼此间隔。
11.在本技术的一实施例中,定位柱的侧壁及定位孔的孔壁均为锥面,以引导定位柱与定位孔配合插接。
12.在本技术的一实施例中,定位柱的高度小于或等于定位孔的深度;和/或定位柱的高度为0.1mm至5mm,定位孔的孔径为0.1mm至5mm。
13.相应地,本技术还提供一种电池。该电池为上述实施例中阐述的电池。
14.本技术的有益效果是:区别于现有技术,本技术提供一种电池以及电池模组。电池的极柱上具有第一定位结构,汇流排上具有第二定位结构,汇流排两端的第二定位结构分别与相邻的电池上的第一定位结构配合连接,实现极柱与汇流排之间的定位。本技术通过第一定位结构与第二定位结构配合,能够实现极柱与汇流排之间的精确定位。本技术省去了现有技术中的夹治具,也就避免了夹治具与极柱之间预留间隙以及夹治具多次重复装配使用而磨损等问题对定位精度的影响,因而本技术能够提高电池的极柱与汇流排之间的定位精度。
15.并且,考虑到第一定位结构和第二定位结构二者所在位置的表面形貌不平整,本技术中电池极柱上的第一定位结构与第一焊接区域彼此间隔以及汇流排上的第二定位结构与第二焊接区域彼此间隔,以在第一焊接区域与第二焊接区域相对焊接配合后,使得电池的极柱与汇流排之间具有良好的焊接效果,能够提高电池的极柱与汇流排之间的焊接良率。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1是本技术电池模组一实施例的结构示意图;
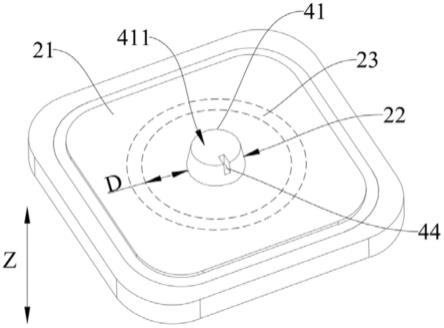
18.图2是本技术电池第一实施例的结构示意图;
19.图3是图2所示电池的极柱的结构示意图;
20.图4是本技术汇流排第一实施例的结构示意图;
21.图5是图4所示汇流排a-a方向的剖面结构示意图;
22.图6是本技术汇流排第二实施例的结构示意图;
23.图7是图6所示汇流排b-b方向的剖面结构示意图;
24.图8是本技术电池第二实施例的结构示意图;
25.图9是图8所示电池的极柱的结构示意图;
26.图10是本技术汇流排第三实施例的结构示意图。
27.附图标记说明:
28.10电池模组;20电池;21极柱;22第一定位结构;23第一焊接区域;24壳体;30汇流排;31第二定位结构;32第二焊接区域;41定位柱;411目标端面;42定位孔;43凸部;44槽部。
具体实施方式
29.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。此外,应当理解的是,此处所描述的具体实施方式仅用于说明和解释本技术,并不用于限制本技术。在本技术中,在未作相反说明的情况下,使用的方位词如“上”、“下”、“左”、“右”通常是指装置实际使用或工作状态下的上、下、左和右,具体
为附图中的图面方向。
30.本技术提供一种电池以及电池模组,以下分别进行详细说明。需要说明的是,以下实施例的描述顺序不作为对本技术实施例优选顺序的限定。且在以下实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其它实施例的相关描述。
31.在现有技术中,电池的极柱与汇流排之间进行激光焊接时,通常需要依靠夹治具对极柱和汇流排进行定位。由于极柱的形状、大小不一,夹治具通常又需要适配多种规格的极柱,这就要求夹治具与极柱之间需要预留间隙,尤其是对于尺寸较小的极柱而言,夹治具与极柱之间的间隙较大,导致夹治具的定位精度较低,并且极柱容易被夹治具破坏,容易发生焊接轨迹偏离极柱区域或者焊接轨迹靠近极柱边缘而熔化顶盖绝缘件等问题。并且,夹治具重复应用于不同极柱和汇流排之间的定位环节,夹治具多次重复装配使用而容易发生磨损,磨损后的夹治具更难保证定位精度,这进一步导致现有技术中夹治具的定位精度较低。
32.为解决现有技术中电池与汇流排之间的定位精度较低的技术问题,本技术的一实施例提供一种电池模组。该电池模组包括至少两个电池,电池具有极柱;其中,极柱具有第一定位结构以及第一焊接区域,第一定位结构与第一焊接区域彼此间隔。该电池模组还包括汇流排,汇流排的相对两端分别具有第二定位结构以及第二焊接区域,第二定位结构与第二焊接区域彼此间隔。其中,汇流排两端的第二定位结构分别与相邻的电池上的第一定位结构配合连接,第一焊接区域与第二焊接区域相对焊接配合。下文进行详细阐述。
33.请参阅图1,图1是本技术电池模组一实施例的结构示意图。
34.在一实施例中,电池模组10包括至少两个电池20。电池20包括但不限于锂离子二次电池、锂离子一次电池、锂硫电池、钠锂离子电池、钠离子电池或镁离子电池等,本公开实施例对此不作限定。电池20用于向用电装置提供电能。用电装置可以是手机、便携式设备、笔记本电脑、电瓶车、电动汽车、轮船、航天器、电动玩具和电动工具等。例如,航天器包括飞机、火箭、航天飞机和宇宙飞船等;电动玩具包括固定式或移动式的电动玩具,例如游戏机、电动汽车玩具、电动轮船玩具和电动飞机玩具等;电动工具包括金属切削电动工具、研磨电动工具、装配电动工具和铁道用电动工具,例如电钻、电动砂轮机、电动扳手、电动螺丝刀、电锤、冲击电钻、混凝土振动器和电刨等。
35.具体地,请一并参阅图2和图3,电池20具有极柱21。极柱21具有第一定位结构22以及第一焊接区域23,第一定位结构22与第一焊接区域23彼此间隔。
36.请一并参阅图4和图5,电池模组10还包括汇流排30。相邻的电池20之间通过汇流排30进行电性连接。具体地,汇流排30的相对两端分别具有第二定位结构31以及第二焊接区域32,第二定位结构31与第二焊接区域32彼此间隔。
37.本实施例中汇流排30两端的第二定位结构31分别与相邻的电池20上的第一定位结构22配合连接,通过第一定位结构22与第二定位结构31配合,能够实现极柱21与汇流排30之间的精确定位。本技术在每个极柱21上设置第一定位结构22且在每个汇流排30上设置第二定位结构31,第一定位结构22与第二定位结构31之间一一对应匹配,避免了夹治具与极柱21之间预留间隙导致定位精度较低的问题,因而能够提高电池20的极柱21与汇流排30之间的定位精度。并且,极柱21与汇流排30之间通过第一定位结构22与第二定位结构31配合连接后即进行焊接固定,第一定位结构22与第二定位结构31之间不存在多次重复装配的
问题,即本实施例避免了夹治具多次重复装配使用而磨损等问题对定位精度的影响,同样能够提高电池20的极柱21与汇流排30之间的定位精度。
38.并且,考虑到第一定位结构22和第二定位结构31二者所在位置的表面形貌不平整(极柱21上第一定位结构22所在的位置表面形貌不平整,汇流排30上第二定位结构31所在的位置表面形貌不平整),本技术中电池20极柱21上的第一定位结构22与第一焊接区域23彼此间隔以及汇流排30上的第二定位结构31与第二焊接区域32彼此间隔,意味着第一焊接区域23和第二焊接区域32二者所在位置的表面形貌较为平整(极柱21上第一焊接区域23所在的位置表面形貌较为平整,汇流排30上第二焊接区域32所在的位置表面形貌较为平整),以在第一焊接区域23与第二焊接区域32相对焊接配合后,使得电池20的极柱21与汇流排30之间具有良好的焊接效果,能够提高电池20的极柱21与汇流排30之间的焊接良率。
39.需要说明的是,电池模组10具有高度方向(如图3至图5中箭头z所示,下同),极柱21沿高度方向延伸。第一焊接区域23环设于第一定位结构22的外周,且第一定位结构22与第一焊接区域23之间在垂直于高度方向的方向上彼此间隔;同理,第二焊接区域32环设于第二定位结构31的外周,且第二定位结构31与第二焊接区域32之间在垂直于高度方向的方向上彼此间隔。
40.进一步地,第一定位结构22与第一焊接区域23之间的间距d为0.5mm至2mm,例如0.5mm、1mm、1.5mm、2mm等。如此一来,能够保证第一焊接区域23足够远离第一定位结构22,有利于保证第一焊接区域23所在位置具有足够平整的表面形貌,同时第一定位结构22与第一焊接区域23之间的间距d不宜过大,避免第一焊接区域23偏离极柱21的端面区域。同理,第二定位结构31与第二焊接区域32之间的间距d为0.5mm至2mm,例如0.5mm、1mm、1.5mm、2mm等。如此一来,能够保证第二焊接区域32足够远离第二定位结构31,有利于保证第二焊接区域32所在位置具有足够平整的表面形貌,同时第二定位结构31与第二焊接区域32之间的间距d不宜过大,保证汇流排30上的第二焊接区域32与极柱21上的第一焊接区域23保持对应关系,便于二者之间焊接配合。
41.在一实施例中,第一定位结构22与第二定位结构31中的一者包括定位柱41,另一者包括定位孔42,定位柱41与定位孔42配合插接,以固定电池20与汇流排30之间的相对位置,实现精确定位,进而便于后续电池20与汇流排30之间进行焊接,可以有效避免焊接轨迹偏离极柱21或者焊接轨迹靠近极柱21边缘而熔化电池20顶盖绝缘件等问题。
42.需要说明的是,本技术实施例以第一定位结构22包括定位柱41、第二定位结构31包括定位孔42为例进行阐述,仅为论述需要,并非因此造成限定。当然,在本技术的其它实施例中,也可以是第一定位结构22包括定位孔42、第二定位结构31包括定位柱41,在此不作限定。
43.在一实施例中,通过定位柱41与定位孔42配合插接,能够限制电池20与汇流排30之间相对移动。并且,定位柱41与定位孔42中的一者凸设有凸部43,另一者设有槽部44。在定位柱41与定位孔42配合插接后,凸部43与槽部44凹凸嵌合设置,以限制极柱21与汇流排30之间的相对转动。具体地,在极柱21与汇流排30沿高度方向进行对接的过程中,定位柱41嵌入定位孔42中,定位孔42中的凸部43同步嵌入定位柱41上的槽部44中,实现电池20与汇流排30之间的精确定位。
44.通过上述方式,本实施例通过定位柱41与定位孔42配合插接以及通过凸部43与槽
部44凹凸嵌合,既能够限制电池20与汇流排30之间相对移动,又能够限制极柱21与汇流排30之间的相对转动,如此实现电池20与汇流排30之间的精确定位。尤其是对于电池20与汇流排30之间通过一个定位柱41和一个定位孔42进行定位的情况,定位柱41与定位孔42配合插接仅能限制电池20与汇流排30之间的相对移动,而凸部43与槽部44凹凸嵌合能够进一步限制极柱21与汇流排30之间的相对转动。
45.进一步地,定位柱41的侧壁及定位孔42的孔壁均为锥面,以引导定位柱41与定位孔42配合插接。具体地,定位柱41为顶部小、底部大的锥台结构,定位孔42为锥孔,定位柱41的侧壁与定位孔42的孔壁二者形状相适配,以在定位柱41与定位孔42配合插接的过程中,定位柱41与定位孔42之间通过锥度配合,能够引导二者之间配合插接的动作,便于定位柱41与定位孔42进行插接而实现电池20与汇流排30之间的定位。
46.可选地,定位柱41的高度小于或等于定位孔42的深度。本实施例优选是定位柱41的高度等于定位孔42的深度。定位柱41的高度为0.1mm至5mm,例如0.1mm、0.5mm、1mm、2mm、3mm、4mm、5mm。定位孔42的孔径为0.1mm至5mm,例如0.1mm、0.5mm、1mm、2mm、3mm、4mm、5mm。
47.定位柱41的形状可以是圆台等。凸部43的形状可以是方形、圆柱,或是其它规则、不规则形状,槽部44的形状与凸部43的形状相适配。并且,凸部43的数量及槽部44的数量可以为一个或多个,当凸部43的数量及槽部44的数量为多个时,该多个凸部43和槽部44沿定位柱41的周向依次间隔分布。定位孔42沿高度方向贯穿汇流排30,即定位孔42为通孔。
48.举例而言,图3展示了槽部44设于定位柱41,图5展示了凸部43设于定位孔42的情况。凸部43凸设于定位孔42的孔壁。电池20还包括壳体24,壳体24上设有极柱21。定位柱41具有背离壳体24的目标端面411,槽部44自目标端面411朝向壳体24延伸。槽部44还沿垂直于高度方向的方向贯穿定位柱41的侧壁。在极柱21与汇流排30对接后,定位柱41嵌入定位孔42中,定位孔42中的凸部43同步嵌入定位柱41上的槽部44中,实现电池20与汇流排30之间的精确定位。汇流排30的下表面与极柱21端面紧贴,汇流排30的上表面与定位柱41的目标端面411平齐。极柱21与汇流排30定位之后,在汇流排30的上表面进行激光焊接。并且,凸部43的高度小于或等于定位孔42的深度,且槽部44的深度小于或等于定位柱41的高度。图3示例性地展示了槽部44的深度小于定位柱41的高度,且图5示例性地展示了凸部43的高度小于定位孔42的深度。
49.请一并参阅图6和图7,图6是本技术汇流排第二实施例的结构示意图,图7是图6所示汇流排b-b方向的剖面结构示意图。
50.在一替代实施例中,本实施例与上述实施例的不同之处在于,定位孔42在高度方向上并未贯穿汇流排30,即定位孔42为盲孔。凸部43凸设于定位孔42的孔壁。极柱21与汇流排30沿高度方向进行对接,定位柱41的目标端面411抵接定位孔42的底壁,同时凸部43与槽部44凹凸嵌合设置,之后在汇流排30的上表面进行激光焊接。
51.请一并参阅图8至图10,图8是本技术电池第二实施例的结构示意图,图9是图8所示电池的极柱的结构示意图,图10是本技术汇流排第三实施例的结构示意图。
52.在另一替代实施例中,本实施例与上述实施例的不同之处在于,定位柱41和定位孔42并未设置凸部43和槽部44,取而代之的是定位柱41的数量及定位孔42的数量均为至少两个,且两两定位柱41之间彼此间隔,两两定位孔42之间彼此间隔。如此一来,在极柱21与汇流排30对接后,各个定位柱41与对应的定位孔42配合插接,既能够限制电池20与汇流排
30之间相对移动,又能够限制极柱21与汇流排30之间的相对转动,如此实现电池20与汇流排30之间的精确定位。
53.可选地,定位柱41的数量、形状与定位孔42的数量、形状相匹配。各个定位柱41及各个定位孔42可以沿极柱21的周向依次间隔分布,如图9和图10所示。当然,在本技术的其它实施例中,各个定位柱41及各个定位孔42可以任意离散分布,在此不作限定。
54.举例而言,在极柱21与汇流排30对接后,各个定位柱41与对应的定位孔42配合插接,实现电池20与汇流排30之间的精确定位。汇流排30的下表面与极柱21端面紧贴,汇流排30的上表面与定位柱41的目标端面411平齐。极柱21与汇流排30定位之后,在汇流排30的上表面进行激光焊接。
55.综上所述,本技术提供的电池以及电池模组,电池的极柱上具有第一定位结构,汇流排上具有第二定位结构,汇流排两端的第二定位结构分别与相邻的电池上的第一定位结构配合连接,实现极柱与汇流排之间的定位。本技术通过第一定位结构与第二定位结构配合,能够实现极柱与汇流排之间的精确定位。本技术省去了现有技术中的夹治具,也就避免了夹治具与极柱之间预留间隙以及夹治具多次重复装配使用而磨损等问题对定位精度的影响,因而本技术能够提高电池的极柱与汇流排之间的定位精度。
56.并且,考虑到第一定位结构和第二定位结构二者所在位置的表面形貌不平整,本技术中电池极柱上的第一定位结构与第一焊接区域彼此间隔以及汇流排上的第二定位结构与第二焊接区域彼此间隔,以在第一焊接区域与第二焊接区域相对焊接配合后,使得电池的极柱与汇流排之间具有良好的焊接效果,能够提高电池的极柱与汇流排之间的焊接良率。
57.以上对本技术提供的电池以及电池模组进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1