一种抓舟机构及硅片加工系统的制作方法
1.本实用新型涉及新能源技术领域,具体而言,涉及一种抓舟机构及硅片加工系统。
背景技术:
2.有技术中石英舟装卸机多为单工位抓舟,效率低下,且设备占地体积也较大,导致空间利用率低,如何使得载有硅片的石英舟进行有效快捷的运输,成为提高生产硅片效率的关键之一。其次就是抓舟机构无法做到兼容多种石英舟托。
技术实现要素:
3.本实用新型解决的问题是现有抓舟机构效率慢导致的硅片整体生产效率过低。
4.一方面,为解决上述问题,本实用新型提供一种抓舟机构,所述抓舟机构包括连接件、第一抓手组件、第二抓手组件和驱动组件,所述第一抓手组件适于沿第一方向移动,所述第一抓手组件用于抓取石英舟;所述第二抓手组件适于沿所述第一方向移动,所述第二抓手组件用于抓取石英舟;所述驱动组件安装于所述连接件上,所述驱动组件分别与所述第一抓手组件和所述第二抓手组件驱动连接,所述驱动组件适于驱动所述第一抓手组件和所述第二抓手组件沿相反的方向移动。
5.可选地,所述驱动组件包括第一驱动机构、丝杆、第一丝杆螺母和第二丝杆螺母,所述第一驱动机构与所述丝杆驱动连接,所述第一丝杆螺母和所述第二丝杆螺母分别与所述丝杆转动连接,所述第一抓手组件与所述第一丝杆螺母连接,所述第二抓手组件与所述第二丝杆螺母连接,所述第一驱动机构适于驱动所述丝杆转动以带动所述第一丝杆螺母和所述第二丝杆螺母沿所述丝杆的轴向方向移动。
6.可选地,所述丝杆的周向表面设置有第一外螺纹和第二外螺纹,所述第一外螺纹与所述第二外螺纹的旋向相反,所述第一丝杆螺母上设置有第一内螺纹,所述第二丝杆螺母上设置有第二内螺纹,所述第一内螺纹与所述第二内螺纹的旋向相同。
7.可选地,所述丝杆的周向表面设置有第三外螺纹,所述第一丝杆螺母上设置有第三内螺纹,所述第二丝杆螺母上设置有第四内螺纹,所述第三内螺纹与所述第四内螺纹的旋向相反。
8.可选地,所述第一抓手组件包括第一夹爪和第二夹爪,所述第一夹爪和所述第二夹爪适于沿第二方向移动,且所述第一夹爪和所述第二夹爪的运动方向相反。
9.可选地,所述第一夹爪包括第一夹持部,所述第二夹爪包括第二夹持部,所述第一夹持部与所述第二夹持部适于与所述石英舟的表面相贴合。
10.可选地,所述第一夹爪还包括第一限位凸起结构,所述第二夹爪还包括第二限位凸起结构,所述第一限位凸起结构和所述第二限位凸起结构适于所述石英舟沿第三方向的限位。
11.另一方面,本实用新型实施例还提供一种动力硅片加工系统,包括石英舟、加热装置和如上所述的抓舟机构,所述抓舟机构适于将所述石英舟放置进所述加热装置中,所述
加热装置用于对所述石英舟中的硅片进行烘烤。
12.可选地,所述石英舟包括顶板、底板和支撑柱,所述支撑柱位于所述顶板和所述底板之间,且所述支撑柱分别与所述顶板和所述底板连接,所述支撑柱上开设有凹槽结构,所述硅片适于卡接在所述凹槽结构中。
13.可选地,所述石英舟还包括第一限位件和第二限位件,所述第一限位件和所述第二限位件分别与所述支撑柱连接,且所述支撑柱位于所述第一限位件和所述第二限位件之间,所述第一限位件适于与第一限位凸起结构止挡配合,所述第二限位件适于与第二限位凸起结构止挡配合。
14.相对于现有技术,本实用新型实施例提供的抓舟机构所具有的有益效果是:
15.通过驱动机构同时驱动第一抓手组件和第二抓手组件移动,以此改变第一抓手组件和第二抓手组件之间的间距,从而可以对前序工序中,处于不同位置的石英舟进行抓取,且每次可以抓取两个石英舟,极大地提高了效率。
附图说明
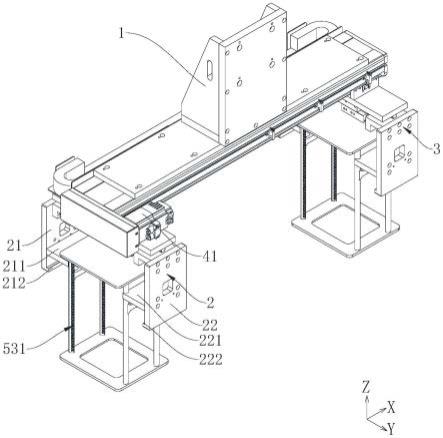
16.图1为本实用新型的抓舟机构的一实施例结构示意图;
17.图2为本实用新型的抓舟机构的另一实施例结构示意图;
18.图3为本实用新型的抓舟机构的另一实施例结构示意图。
19.附图标记说明:
20.1-连接件;2-第一抓手组件;21-第一夹爪;211-第一夹持部;212-第一限位凸起结构;22-第二夹爪;221-第二夹持部;222-第二限位凸起结构;3-第二抓手组件;31-第三夹爪;32-第四夹爪;4-驱动组件;41-第一驱动机构;42-丝杆;43-第一丝杆螺母;44-第二丝杆螺母;5-石英舟;51-顶板;52-底板;53-支撑柱;531-凹槽结构;54-第一限位件;55-第二限位件。
具体实施方式
21.术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或转动连接;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
22.本实用新型的实施例的附图中设置有坐标系xyz,其中x轴的正向代表右方,x轴的反向代表左方,z轴的正向代表上方,z轴的反向代表下方,y轴的正向代表前方,y轴的反方向代表后方,且术语“上”、“下”、“前”、“后”、“左”和“右”等指示的方向或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
23.术语“第一”、“第二”和“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”和“第三”的特征可以明示或者隐含地包括至少一个该特征。
24.为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本
实用新型的具体实施例做详细的说明。
25.如图1所示,本实用新型的一实施例提供一种抓舟机构。所述抓舟机构包括连接件1、第一抓手组件2、第二抓手组件3和驱动组件4,所述第一抓手组件2适于沿第一方向移动,所述第一抓手组件2用于抓取石英舟5;所述第二抓手组件3适于沿所述第一方向移动,所述第二抓手组件3用于抓取石英舟5;所述驱动组件4安装于所述连接件1上,所述驱动组件4分别与所述第一抓手组件2和所述第二抓手组件3驱动连接,所述驱动组件4适于驱动所述第一抓手组件2和所述第二抓手组件3沿相反的方向移动。
26.连接件1可以与外部机械臂连接,外部机械臂可以为六轴机械臂,从而通过六轴机械臂可以带动该抓舟机构在空间中移动。第一抓手组件2和第二抓手组件3可以分别抓取一个石英舟5,在石英舟5中可以放置有硅片,由于前序工序中,石英舟5所处的位置会存在一定区别。因此通过驱动机构同时驱动第一抓手组件2和第二抓手组件3移动,以此改变第一抓手组件2和第二抓手组件3之间的间距,从而可以对前序工序中,处于不同位置的石英舟5进行抓取,且每次可以抓取两个石英舟5,极大地提高了效率。与此同时,通过一个驱动组件4以带动第一抓手组件2和第二抓手组件3同时移动,驱动组件4的数量只有1个可以有效地节约空间,可以保障抓舟机构的体积在合适的范围内。
27.如图1和图2所示,在本实用新型的一种实施方式中,所述驱动组件4包括第一驱动机构41、丝杆42、第一丝杆螺母43和第二丝杆螺母44,所述第一驱动机构41与所述丝杆42驱动连接,所述第一丝杆螺母43和所述第二丝杆螺母44分别与所述丝杆42转动连接,所述第一抓手组件2与所述第一丝杆螺母43连接,所述第二抓手组件3与所述第二丝杆螺母44连接,所述第一驱动机构41适于驱动所述丝杆42转动以带动所述第一丝杆螺母43和所述第二丝杆螺母44沿所述丝杆42的轴向方向移动。
28.在一种实施例中,所述丝杆42的周向表面设置有第一外螺纹和第二外螺纹,所述第一外螺纹与所述第二外螺纹的旋向相反,所述第一丝杆螺母43上设置有第一内螺纹,所述第二丝杆螺母44上设置有第二内螺纹,所述第一内螺纹与所述第二内螺纹的旋向相同。
29.沿丝杆42的轴向方向,丝杆42其中一半的周向表面设置有第一外螺纹,而丝杆42的另外一半的周向表面设置有第二外螺纹,第一丝杆螺母43和第二丝杆螺母44可以与丝杆42螺纹连接,且随着丝杆42转动,第一丝杆螺母43和第二丝杆螺母44可以沿着丝杆42的轴向方向移动。例如,当丝杆42绕顺时针方向转动时,第一丝杆螺母43可以沿x轴负方向移动,而第二丝杆螺母44沿x轴正方向转动;当丝杆42绕逆时针方向转动时,第一丝杆螺母43可以沿x轴正方向移动,而第二丝杆螺母44可以沿x轴负方向移动。
30.因此当第一驱动机构41驱动丝杠转动时,第一丝杆螺母43和第二丝杆螺母44可以由丝杆42的中间位置向丝杠的两端移动,第一丝杆螺母43和第二丝杆螺母44还可以由丝杠的两端向丝杆42的中间位置移动。随着第一丝杆螺母43和第二丝杆螺母44的移动进而可以实现第一抓手组件2和第二抓手组件3的移动。
31.在另一种实施例中,所述丝杆42的周向表面设置有第三外螺纹,所述第一丝杆螺母43上设置有第三内螺纹,所述第二丝杆螺母44上设置有第四内螺纹,所述第三内螺纹与所述第四内螺纹的旋向相反。
32.由于第三内螺纹与第四内螺纹的旋向相反,因此在丝杆42转动时,第一丝杆螺母43与第二丝杆螺母44的移动方向相反。例如,当丝杆42绕顺时针方向转动时,第一丝杆螺母
43可以沿x轴正方向移动,而第二丝杆螺母44沿x轴负方向转动;当丝杆42绕逆时针方向转动时,第一丝杆螺母43可以沿x轴负方向移动,而第二丝杆螺母44可以沿x轴正方向移动。随着第一丝杆螺母43和第二丝杆螺母44的移动进而可以实现第一抓手组件2和第二抓手组件3的移动。
33.在本实用新型的另一种实施方式中,驱动组件4可以包括第一带轮、第二带轮和皮带,所述皮带可以部分环绕设置在所述第一带轮和所述第二带轮的周向表面。电机可以与第一带轮或者第二带轮驱动连接,例如,当电机与第一带轮驱动连接时,随着电机驱动第一带轮转动,第二带轮和皮带会同步转动。
34.皮带可以分别与第一抓手组件2和第二抓手组件3连接,且皮带位于第一抓手组件2和第二抓手组件3之间,第一抓手组件2和第二抓手组件3位于第一带轮和第二带轮之间。第一带轮和第二带轮可以将皮带分成两段,且两段皮带的运动方向相反,第一抓手组件2和第二抓手组件3分别与其中一段皮带连接。随着电机驱动第一带轮转动,第一抓手组件2和第二抓手组件3可以沿相反的方向移动,以调节第一抓手组件2和第二抓手组件3之间的间距。即当第一抓手组件2沿x轴正方向移动时,第二抓手组件3可以沿着x轴负方向移动;当第一抓手组件2沿x轴负方向移动时,第二抓手组件3可以沿着x轴正方向移动。
35.如图1和图2所示,所述第一抓手组件2包括第一夹爪21和第二夹爪22,所述第一夹爪21和所述第二夹爪22适于沿第二方向移动,且所述第一夹爪21和所述第二夹爪22的运动方向相反。
36.第一夹爪21和第二夹爪22可以分别由一个气缸进行驱动,通过气缸可以驱动第一夹爪21和第二夹爪22移动,且第一夹爪21和第二夹爪22的移动方向可以为y轴方向。例如当需要夹取石英舟5时,第一夹爪21可以沿y轴正方向移动,而第二夹爪22可以沿y轴负方向移动,第一夹爪21和第二夹爪22之间的间距减小,以将石英舟5夹紧;当将石英舟5移动至指定的位置时,第一夹爪21可以沿y轴负方向移动,而第二夹爪22可以沿y轴正方向移动,第一夹爪21和第二夹爪22之间的间距增大,以将石英舟5放下。
37.如图1和图2所示,所述第一夹爪21包括第一夹持部211,所述第二夹爪22包括第二夹持部221,所述第一夹持部211与所述第二夹持部221适于与所述石英舟5的表面相贴合。第一夹持部211和第二夹持部221可以采用非金属材料制成,例如,塑料、橡胶等,通过非金属材料制成的第一夹持部211和第二夹持部221可以避免石英舟5被夹伤损坏。
38.所述第二抓手组件3包括第三夹爪31和第四夹爪32,所述第三夹爪31和所述第四夹爪32适于沿第二方向移动,且所述第三夹爪31和所述第四夹爪32的运动方向相反。
39.第三夹爪31和第四夹爪32可以分别由一个气缸进行驱动,通过气缸可以驱动第三夹爪31和第四夹爪32移动,且第三夹爪31和第四夹爪32的移动方向可以为y轴方向。例如当需要夹取石英舟5时,第三夹爪31可以沿y轴正方向移动,而第四夹爪32可以沿y轴负方向移动,第三夹爪31和第四夹爪32之间的间距减小,以将石英舟5夹紧;当将石英舟5移动至指定的位置时,第三夹爪31可以沿y轴负方向移动,而第四夹爪32可以沿y轴正方向移动,第三夹爪31和第四夹爪32之间的间距增大,以将石英舟5放下。
40.所述第三夹爪31包括第三夹持部,所述第四夹爪32包括第四夹持部,所述第三夹持部与所述第四夹持部适于与所述石英舟5的表面相贴合。第三夹持部和第四夹持部可以采用非金属材料制成,例如,塑料、橡胶等,通过非金属材料制成的第三夹持部和第四夹持
部可以避免石英舟5被夹伤损坏。
41.如图1和图2所示,所述第一夹爪21还包括第一限位凸起结构212,所述第二夹爪22还包括第二限位凸起结构222,所述第一限位凸起结构212和所述第二限位凸起结构222适于所述石英舟5沿第三方向的限位。
42.第三方向可以为图中z轴的方向,第一限位凸起结构212和第二限位凸起结构222可以起到对石英舟5沿z轴方向限位的作用,例如在石英舟5上可以挡块结构,而挡块结构可以放置在第一限位凸起结构212和第二限位凸起结构222上,以此避免石英舟5沿z轴方向向下掉落。
43.所述第三夹爪31还包括第三限位凸起结构,所述第四夹爪32还包括第四限位凸起结构,所述第三限位凸起结构和所述第四限位凸起结构适于所述石英舟5沿第三方向的限位。
44.第三方向可以为图中z轴的方向,第三限位凸起结构和第四限位凸起结构可以起到对石英舟5沿z轴方向限位的作用,例如在石英舟5上可以挡块结构,而挡块结构可以放置在第三限位凸起结构和第四限位凸起结构上,以此避免石英舟5沿z轴方向向下掉落。
45.本实用新型的另一实施例提供一种动力硅片加工系统,其特征在于,包括石英舟5、加热装置和如上所述的抓舟机构,所述抓舟机构适于将所述石英舟5放置进所述加热装置中,所述加热装置用于对所述石英舟5中的硅片进行烘烤。
46.在硅基太阳能电池的生产过程中,硅片扩散工艺是必不可少的,常见的采用固态热扩散(soild-state thermal diffusion)工艺形成p-n结需要两步。第一步称为淀积(deposition),第二步称为推进(drive-in)。
47.扩散工艺的第一步是淀积,也称预淀积(pre-deposition)。硅片位于扩散炉内恒温区,掺杂源按规定的浓度以气体形式导入扩散炉内。在炉内掺杂源经过化学反应在硅片表面形成一层含有掺杂原子的薄层。该过程中由于氧气的作用,在硅片表面生成一层sio2薄层。掺杂源的选择由很多,常见制备n型薄层的是pocl3,制备p型薄层的是bbr3,它们与氧气反应分别生成p2o5或b2o3。p2o5、b2o3在结构上类似sio2,很容易溶入sio2薄层,并与si反应生成p或b。形成一层浓度高但薄的掺杂层。
48.扩散工艺的第二步是推进,也称扩散。这一步的目的是掺杂原子在硅片中向更深处的再分布。在预淀积过程中,形成浓度高但薄的杂质薄层。在推进过程,不再有新的掺杂原子达到硅片,在高温下掺杂原子由高浓度区域向低浓度区域发生更深的扩散。扩散中,引入的掺杂原子数量不变,硅片表面浓度降低,掺杂原子形成新的分布。
49.通过将硅片放入加热装置中,通以氮气和pocl3等气体,在高温下分解后在硅片表面形成p-n结。扩散过程是将未处理的硅片从花篮中转载在石英舟5上,然后将载有硅片的小石英舟5运输至舟托中再送入加热装置中进行烘烤。
50.如图2和图3所示,所述石英舟5包括顶板51、底板52和支撑柱53,所述支撑柱53位于所述顶板51和所述底板52之间,且所述支撑柱53分别与所述顶板51和所述底板52连接,所述支撑柱53上开设有凹槽结构531,所述硅片适于卡接在所述凹槽结构531中。
51.支撑柱53的数量可以为4个,每个支撑柱53上均可以开设有凹槽结构531,每片硅片可以由4个支撑柱53对其进行固定,且硅片可以堆叠放置在顶板51和底板52之间。在进行硅片的放置时,可以将硅片沿水平方向卡接入支撑柱53的凹槽结构531内,此时就可以完成
硅片的固定,在加热装置对硅片烘烤完成后,可以将烘烤完成的硅片沿水平方向取出。
52.如图2和图3所示,所述石英舟5还包括第一限位件54和第二限位件55,所述第一限位件54和所述第二限位件55分别与所述支撑柱53连接,且所述支撑柱53位于所述第一限位件54和所述第二限位件55之间,所述第一限位件54适于与第一限位凸起结构212止挡配合,所述第二限位件55适于与第二限位凸起结构222止挡配合。
53.第一限位件54和第二限位件55可以分别搭在第一限位凸起结构212和第二限位凸起结构222上,从而可以避免石英舟5向下掉落。而如果石英舟5只通过第一抓手组件2或第二抓手组件3进行固定时,由于随着石英舟5上硅片的放置数量增加,石英舟5的整体重量会增加。而为了保障对石英舟5的夹紧,需要第一抓手组件2或第二抓手组件3加大对石英舟5的夹持力,而夹持力过大容易导致石英舟5损坏。所以通过设置第一限位件54和第二限位件55,使得第一限位件54和第二限位件55分别搭在第一限位凸起结构212和第二限位凸起结构222上就可以避免石英舟5向下脱落的同时,第一抓手组件2和第二抓手组件3也不用对石英舟5提供过大的夹持力,以避免将石英舟5夹坏。
54.虽然本技术披露如上,但本技术的保护范围并非仅限于此。本领域技术人员在不脱离本技术的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1