用于在发生处理移位时使用经调整的卡紧电压进行卡紧操作的方法、系统和设备与流程
用于在发生处理移位时使用经调整的卡紧电压进行卡紧操作的方法、系统和设备
背景领域
1.本公开的实施例涉及半导体处理,且更具体地涉及静电地卡紧基板。
背景技术:
2.在静电卡盘的寿命期间,可发生工艺漂移。例如,静电卡盘上的污染物沉积和/或静电卡盘表面的粗糙化可导致施加至基板的卡紧力发生变化。工艺漂移可阻碍处理操作、可导致基板粘附和/或基板破裂、可导致处理期间基板弹出、可导致基板上的正面缺陷和背面缺陷、并且可限制静电卡盘的操作寿命。
3.因此,需要一种改良的静电卡盘及其使用方法。
技术实现要素:
4.本文描述了静电卡盘及其使用方法。在一个实施方式中,一种卡紧基板的方法包括在处理腔室中对基板进行第一处理操作。第一处理操作包括在基板被支撑在静电卡盘(esc)上时,向设置在处理腔室中的esc施加卡紧电压。所述方法包括确定处理移位已经发生。确定处理移位已经发生包括以下步骤中的一者或多者:确定基板的中心已经相对于所述中心在第一处理操作之前的预处理位置移动了后处理移位,或者确定基板背侧表面的缺陷计数超过缺陷阈值。所述方法包括基于处理移位的发生来确定经调整的卡紧电压。
5.在一个实施方式中,一种用于进行卡紧操作的非暂时性计算机可读介质包括指令,所述指令在被执行时使多个操作被进行。所述多个操作包括在处理腔室中对基板进行第一处理操作。第一处理操作包括在基板被支撑在的静电卡盘(esc)上时,将卡紧电压施加至处理腔室中的esc。所述多个操作包括确定处理移位已经发生。确定处理移位已经发生包括以下步骤中的一者或多者:确定基板的中心已经相对于所述中心在第一处理操作之前的预处理位置移动了后处理移位,或者确定基板背侧表面的缺陷计数超过缺陷阈值。所述多个操作包括基于处理移位的发生来确定经调整的卡紧电压。
6.在一个实施方式中,一种用于处理基板的系统包括处理腔室,所述处理腔室包括处理容积。所述系统包括设置在处理腔室中的静电卡盘(esc)。所述系统包括控制器,所述控制器包括指令,所述指令在被执行时使得处理腔室在处理腔室中对基板进行第一处理操作。第一处理操作包括在基板被支撑在esc上时向esc施加卡紧电压。所述指令在被执行时使得处理器确定处理移位已经发生。确定处理移位已经发生包括以下步骤中的一者或多者:确定基板的中心已经相对于所述中心在第一处理操作之前的预处理位置移动了后处理移位,或者确定基板背侧表面的缺陷计数超过缺陷阈值。所述指令在被执行时使得处理器基于处理移位的发生来确定经调整的卡紧电压。
附图说明
7.为便于详细理解本公开的上述特征,可通过参考实施例获得对上文简要概述的本公开的更具体描述,实施例中的一些实施例在附图中进行了说明。然而,要注意的是,附图仅示出了示例性实施例,因此不应被认为是对范围的限制,因为本公开可允许其他等效的实施例。
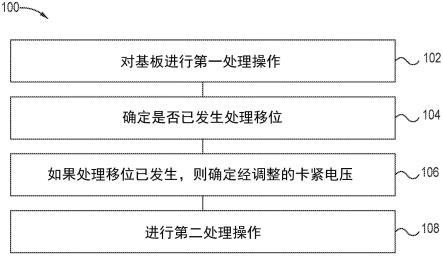
8.图1是根据一个实施方式的卡紧基板的方法的框图。
9.图2是根据一个实施方式的可用于执行图1所示的方法100的用于处理基板的系统的部分示意图。
10.图3a是根据一个实施方式的处理腔室的示意性局部剖视图。
11.图3b是根据一个实施方式的图3a所示的处理腔室的放大示意图。
12.图3c是根据一个实施方式的图3a所示的处理腔室的放大示意图,其中处理腔室中有传感器基板装置。
13.图4是根据一个实施方式的在第一处理操作后的基板背侧表面的缺陷计数图的示意图。
14.图5是根据一个实施方式的支撑在图3a所示的机器人的机器人叶片上的基板的示意性俯视图。
15.图6是根据一个实施方式的支撑在图3a所示的机器人的机器人叶片上的基板的示意性侧视图。
16.为便于理解,尽量使用相同的附图标记来表示图中共享的相同要素。设想一个实施例的要素和特征可有利地并入其他实施例中,而无需进一步叙述。
具体实施方式
17.本公开的各方面涉及用于在处理移位发生时使用经调整的卡紧电压进行卡紧操作的方法、系统和设备。
18.图1是根据一个实施方式卡紧基板的方法100的框图。在操作102处,在处理腔室中对基板进行第一处理操作。第一处理操作包括在基板被支撑在静电卡盘(esc)上时,将卡紧电压施加至处理腔室中的esc。卡紧电压是被选择来产生目标卡紧力的预定卡紧电压。第一处理操作包括在基板被支撑在esc上时进行蚀刻操作、沉积操作、氧化操作、退火操作和/或离子注入操作中的一者或多者。
19.在操作102之后,执行操作104,以确定是否发生了处理移位。处理移位的发生指示由于esc条件的变化,预定的卡紧电压不再产生目标卡紧力。允许处理移位的esc可被称为已移位的esc。确定处理移位是否已经发生包括以下步骤中的一者或多者:确定基板的中心是否已经相对于中心在第一处理操作之前的预处理位置移动了后处理移位,和/或确定基板背侧表面的污染是否超过缺陷阈值。可使用基板背侧表面上存在的缺陷(诸如颗粒)的计数来确定背侧表面的污染。后处理移位是在x-y平面(例如,水平面)中从初始预处理位置(例如,中心)起的预定阈值的位移。预定阈值在0.5mm至10mm的范围内,诸如1mm至5mm。确定基板的中心是否已经移动了后处理移位包括将基板从esc举起,以及在进行第一处理操作之后移动基板经过由一个或多个激光传感器发射的光。移动基板经过由一个或多个激光传感器发射的光包括在基板被支撑在机器人叶片上时移动基板。确定基板的中心是否已经移
动了后处理移位还包括确定沿着基板的外周的多个位置,所述多个位置位于x-y平面中,以及使用所述多个位置计算中心的后处理位置。确定基板的中心是否已经移动了后处理移位还包括确定后处理位置与前处理位置之间的后处理移位。
20.在一个示例中,缺陷阈值在5,000个缺陷至10,000个缺陷的范围内,诸如在8,000个缺陷至10,000个缺陷的范围内。在一个示例中,缺陷阈值大于10,000个缺陷。在操作104处,在处理腔室和/或第二腔室(诸如装载锁定腔室、移送腔室、缓冲腔室、接口腔室或工厂接口腔室)中的一者或多者中,进行确定是否发生了处理移位。
21.在操作106处,如果发生了处理移位,则确定经调整的卡紧电压。在可与其他实施例结合的一个实施例中,确定经调整的卡紧电压包括将传感器基板装置移送到处理腔室中和esc上,并在传感器基板装置被支撑在esc上时测量施加至传感器基板装置的卡紧力。传感器基板装置包括多个嵌入式传感器,所述传感器测量由esc施加至传感器基板装置的施加静电力。选择经调整的卡紧电压以产生具有移位的esc的目标卡紧力。在可与其他实施例结合的一个实施例中,确定经调整的卡紧电压包括对移送到第一处理腔室中的已移位的esc上的工件进行弹出操作。工件包括基板或第二基板。
22.弹出操作包括向esc施加初始卡紧电压,并使背侧气体流向工件的背侧表面。初始卡紧电压是背侧气体以低于泄漏阈值的泄漏速率泄漏经过工件外边缘的电压。初始卡紧电压可与在操作102施加的卡紧电压相同,或者可低于或高于在操作102施加的卡紧电压。弹出操作还包括,在使背侧气体流向背侧表面时,将初始卡紧电压斜升或斜降至泄漏电压,在所述泄漏电压下,背侧气体以超过泄漏阈值的泄漏速率泄漏经过工件的外边缘。在一个示例中,背侧气体在约16托的背面压力下流动,同时处理腔室的处理容积保持在约10毫托。初始卡紧电压以电压增量(诸如25伏或100伏的增量)斜升或斜降。泄漏阈值在每分钟2.0标准立方厘米(sccm)至5.0sccm的范围内,诸如2.0sccm。通过将安全电压裕量(margin)添加至泄漏电压或从泄漏电压中减去安全电压裕量,来确定经调整的卡紧电压。如果通过将初始卡紧电压斜降到泄漏电压来确定泄漏电压,则将安全电压裕量添加至泄漏电压,以提供高于泄漏电压的工作裕量(用于产生目标卡紧电压)。如果通过将初始卡紧电压斜升到泄漏电压来确定泄漏电压,则从泄漏电压中减去安全电压裕量,以提供低于泄漏电压的工作裕量(用于产生目标卡紧电压)。安全电压裕量由泄漏电压乘以比率因子确定,并且所述比率因子为0.2或更大。安全电压裕量可以是例如200伏或300伏。
23.在操作108处,在处理腔室中进行第二处理操作。第二处理操作在基板、第二基板或第三基板上进行。第二处理操作包括当基板、第二基板或第三基板被支撑在esc上时,向esc施加经调整的卡紧电压。在第二处理操作期间,经调整的卡紧电压用于将基板、第二基板或第三基板卡紧到esc。第二处理操作包括蚀刻操作、沉积操作、氧化操作、退火操作和/或离子注入操作中的一者或多者。
24.图2是根据一个实施方式的可用于执行图1所示的方法100的用于处理基板的系统200的部分示意图。系统200包括处理腔室201和第二腔室203。控制器220耦合到处理腔室201和第二腔室203,以控制处理腔室201和第二腔室203的操作。第二腔室203包括容积218和机器人227,机器人227具有机器人叶片226,并被配置为将机器人叶片226伸入和撤出处理腔室201的处理容积206。第二腔室203可以是装载锁定腔室、移送腔室、缓冲腔室、接口腔室或工厂接口腔室。第二腔室203可直接附接到处理腔室201,或者第二腔室203可与处理腔
室201分离(例如,间接附接到处理腔室201)。机器人叶片226用于在腔室201、203之间移动基板。
25.系统200包括一个或多个传感器,所述一个或多个传感器监测系统200的一个或多个方面的条件和/或性质,诸如第二腔室203的容积118、处理腔室201的处理容积206和/或基板表面。系统200包括一个或多个模块290(示出了一个模块),所述一个或多个模块290具有设置在第二腔室203中的一个或多个传感器291a-291d(示出了四个模块)。一个或多个传感器291a-291d中的至少一者是颗粒传感器,所述颗粒传感器被配置为测量基板背侧表面上的缺陷(诸如污染物)的缺陷计数。在一个示例中,缺陷计数是在不直接连接到处理腔室201的工具或腔室中测量的。传感器291a-291d可以是计量传感器、基板上光谱传感器(诸如x射线荧光光谱(xrf)传感器和/或x射线光电子光谱(xps)传感器)、颗粒计数器、相机、光学传感器和/或位置传感器。
26.系统200包括耦合至第二腔室203的一个或多个激光传感器280。激光传感器280中的每一者是第二腔室203的局部中心探测器(lcf)的一部分。一个或多个激光传感器280可设置在容积218中或在容积218的外部。激光传感器280用于检测基板(当被承载在机器人叶片226上时)的外周上的至少三个位置,从这些位置确定基板的中心。可将测得的基板中心与基于机器人运动的预期位置进行比较,以确定esc上是否已经发生了位置移位。本公开设想一个或多个激光传感器280可设置在处理腔室201或第三腔室205中。
27.系统200包括与第二腔室203直接或间接连接的第三腔室205(测量腔室)。第三腔室205包括颗粒传感器293a,所述颗粒传感器293a被配置为在处理腔室201中对基板进行第一处理操作之后,测量基板背面上的缺陷的缺陷计数。颗粒传感器293a是计量传感器、基板上光谱传感器(诸如x射线荧光光谱(xrf)传感器和/或x射线光电子光谱(xps)传感器)、颗粒计数器、相机、光学传感器和/或位置传感器。在可与其他实施例结合的一个实施例中,被配置为测量缺陷计数的颗粒传感器293a被设置在不同于处理腔室201的第三腔室205中,且不直接附接到处理腔室201。在此类实施例中,在进行缺陷计数测量之前,将基板从处理腔室201中取出,且在基板被放置在不直接连接到处理腔室201的第三腔室205中时测量缺陷计数。在可与其他实施例结合的一个实施例中,翻转基板,使得基板的背侧表面朝上,并进行缺陷计数测量,诸如通过使用第三腔室205中的颗粒传感器293a。第三腔室205可以是装载锁定腔室、移送腔室、缓冲腔室、接口腔室或工厂接口腔室。本公开设想颗粒传感器293a可设置在第二腔室203或处理腔室205中。本公开设想第二腔室203中的传感器291a-291d中的一者或多者可被配置为进行针对颗粒传感器293a描述的操作。
28.第三腔室205可包括翻转装置,所述翻转装置翻转基板,使得背侧表面朝上。第三腔室205还可包括机器人,诸如类似于设置在第二腔室203中的机器人227的机器人。
29.图3a是根据一个实施方式的处理腔室300的示意性部分剖视图。处理腔室300可用作图2所示的系统200的处理腔室201。处理腔室300是被配置为在基板303上进行蚀刻操作的蚀刻腔室。可适用于本文所公开方面的合适的处理腔室包括例如可从加利福尼亚州圣克拉拉市的应用材料公司获得的或处理腔室。处理腔室300包括封闭处理容积306的腔室主体302和盖304。腔室主体302由铝、不锈钢或其他合适的材料制成。腔室主体302包括侧壁308和底部320。基板出入口331被限定在侧壁308中,并被狭缝阀333选择性地密封,以便于将基板303移送进出处理腔室300。排气口326被限
定在腔室主体302中,并将处理容积306耦合到泵系统328。泵系统328通常包括一个或多个泵和节流阀以用于抽空和调节处理腔室300的处理容积306的压力。在一个实施方式中,泵系统328将处理容积306内的压力保持在通常介于约10毫托至约500托之间的工作压力。
30.盖304密封地支撑在腔室主体302的侧壁308上。盖304可被打开以允许过量进入处理腔室300的处理容积306。盖304包括便于光学流程监测的窗口324。在一个实施方式中,窗口324由石英或可透射安装在处理腔室300外部的光学监测系统340所使用的信号的其他合适的材料构成。光学监测系统340被定位成通过窗口324观察腔室主体302的处理容积306和/或位于基板支撑基座组件348上的基板303中的至少一者。基板303包括前侧表面305和背侧表面307。光学监测系统340耦合到盖304,并用于测量基板303的各方面,诸如前侧表面305上形成的结构和/或背侧表面307上的缺陷(诸如颗粒,例如污染物)的缺陷计数。光学监测系统340可用于创建背侧表面307上的缺陷(诸如颗粒)的缺陷图。光学监测系统340可用作终点检测器、光发射光谱(oes)、二次离子质谱(sims)、信号检测器、光学检测器、上述各项的组合、和/或与处理腔室300相关联的其他合适的传感器或检测器。终点检测器可用于检测处理腔室300中的物质,诸如处理容积306中的物质,例如接近基板303的前侧表面305。在操作中,光学监测系统340可向控制器220传输信号,以促进其操作和确定。
31.气体面板358耦合至处理腔室300,以向处理容积306提供处理气体和/或清洁气体。在图3a所示的实施方式中,一个或多个入口332(入口332’、332”)设置在盖304中,以允许气体从气体面板358输送到处理腔室300的处理容积306。在一个实施方式中,气体面板358适配成通过入口332’、332”将氟化处理气体提供到处理腔室300的处理容积306中。在一个实施方式中,从气体面板358提供的处理气体至少包括氟化气体、氯、含碳气体、氧气、含氮气体和含氯气体。氟化和含碳气体的示例包括chf3、ch2f2和cf4。其他氟化气体可包括c2f、c4f6、c3f8和c5f8中的一种或多种。含氧气体的示例包括o2、co2、co、n2o、no2、o3、h2o等。含氮气体的示例包括n2、nh3、n2o、no2等。含氯气体的示例包括hcl、cl2、ccl4、chcl3、ch2cl2、ch3cl等。含碳气体的合适示例包括甲烷(ch4)、乙烷(c2h6)、乙烯(c2h4)等。
32.喷淋头组件330耦合至盖304的内表面314。喷淋头组件330包括多个孔,所述多个孔允许气体从入口332’、332”流经喷淋头组件330进入处理腔室300的处理容积306,在处理腔室300中正在处理的基板303的整个表面上形成预定义的分布。远程等离子体源377可以可选地耦合到气体面板358,以便于在进入处理容积306进行处理之前,从远程等离子体中分离气体混合物。rf源功率343通过匹配网络341耦合到喷淋头组件330。rf源功率343可在从约50khz到约200mhz范围内的可调谐频率下产生高达约3000瓦的功率。喷淋头组件330包括透射光学计量信号的区域。光学透射区域或通道338适于允许光学监测系统340观察处理容积306和/或位于基板支撑基座组件348上的基板303。通道338可以是形成或设置在喷淋头组件330中的材料、孔或多个孔,其可大体上透射由光学监测系统340产生和反射回的能量的波长。
33.基板支撑基座组件348设置在喷淋头组件330下方的处理腔室300的处理容积306中。基板支撑基座组件348在处理期间保持并卡紧基板303。基板支撑基座组件348通常包括穿过其设置的多个升降杆(未示出),所述多个升降杆被配置为从基板支撑基座组件348举起基板303,并便于用通过基板出入口331延伸到处理腔室300中的机器人227交换基板303。内衬318可紧密围绕基板支撑基座组件348的外周。
34.在一个实施方式中,基板支撑基座组件348包括安装板362、底板364和静电卡盘(esc)366。一种或多种材料(诸如结合材料)可设置在esc 366与底板364之间。esc 366由诸如aln或al2o3之类的陶瓷材料形成。替代地,esc 366可以是层压在聚合物片之间的电极。安装板362耦合至腔室主体302的底部320,并包括用于将诸如流体、电源线和传感器引线等公用设施布线到底板364和esc 366的通道。esc 366包括至少一个电极380,以用于将基板303卡紧到esc 366,以将基板303保持在喷淋头组件330下方。卡紧电源382耦合到esc 366,并可操作以向电极380施加卡紧电压,以产生将基板303卡紧到esc 366的卡紧界面311的静电力(卡紧力)。卡紧电源382被配置成向esc 366施加高达5000伏、诸如在0伏至2000伏的范围内的卡紧电压(例如,目标卡紧电压、初始卡紧电压和经调整的卡紧电压)。
35.底板364或esc 366中的至少一者可包括至少一个可选的嵌入式加热器376、至少一个可选的嵌入式隔离件374和多个导管368、370,以控制基板支撑基座组件348的横向温度分布。导管368、370流体耦合到流体源372,流体源372使温度调节流体在其中循环。加热器376由电源378调节。导管368、370和加热器376用于控制底板364的温度,从而加热和/或冷却esc 366,并最终控制设置在其上的基板303的温度分布。可使用多个温度传感器390、392来监测esc 366和底板364的温度。在一个实施方式中,基板支撑基座组件348被配置为阴极,且电极380或第二电极耦合到多个rf偏置电源384、386。rf偏置电源384、386耦合在设置在基板支撑基座组件348中的电极380与另一个电极(诸如喷淋头组件330或腔室主体302的顶板(盖304))之间。rf偏置功率激发并维持由设置在腔室主体302的处理区域中的气体形成的等离子体放电。双rf偏置电源384、386通过匹配电路388耦合到设置在基板支撑基座组件348中的电极380。由rf偏置电源384、386产生的信号通过匹配电路388经由单个馈电器递送到基板支撑基座组件348,以使处理腔室300中提供的气体混合物离子化,从而提供执行沉积操作、蚀刻操作或其他操作所需的离子能量。rf偏置电源384、386能够产生具有从约50khz到约200mhz的频率和在约0瓦到约5000瓦之间的功率的rf信号。额外的偏置电源389可耦合到电极380,以控制等离子体的特性。
36.在一种操作模式中,基板303支撑在处理腔室300中基板支撑基座组件348的esc 366上。处理气体和/或气体混合物通过喷淋头组件330从气体面板358引入到腔室主体302中。真空泵系统328维持腔室主体302内部的压力,同时移除副产品。
37.图3b是根据一个实施方式的图3a所示的处理腔室300的放大示意图。卡紧接口311包括外部支撑表面344。esc 366包括设置在外部支撑表面344内侧的凹陷表面345和相对于凹陷表面345向上突出的多个凸台346。卡紧接口311包括多个凸台346的上表面347。esc 366包括多个凸台346之间的多个气体通道349,诸如凹槽。多个气体通道349用于将背侧气体g1流至基板303的背侧表面307。多个气体通道349流体连接到供应背侧气体g1的气体源。背侧气体g1可以是氦气或其他合适的气体。在操作中,在受控压力下将背侧气体g1提供到气体通道中,以增强esc 366与基板303之间的热传递。可在方法100的(操作102的)第一处理操作、方法100的(操作108的)第二处理操作和方法100的弹出操作期间提供背侧气体g1。多个气体通道349可通过形成在esc 366中的至少一个或多个气体开口351流体连接到气体源。
38.在方法100所述的弹出操作期间,使用卡紧电源382施加的初始卡紧电压斜升或斜降,直至卡紧电压达到泄漏电压,在所述泄漏电压下,背侧气体g1以超过泄漏阈值的泄漏速
率泄漏经过基板303的外边缘309。当背侧表面307至少部分地与外部支撑表面344分离时,背侧气体g1在背侧表面307与外部支撑表面344之间泄漏(如图3b中的虚线所示)。在弹出操作之后,基板303可从处理腔室300中移出,且第二基板(类似于基板303)可放置在esc 366上,使得在处理腔室300中的第二基板上进行第二处理操作。
39.如上所述,可在处理腔室300外部和不同的工具或腔室(诸如测量腔室)中测量缺陷计数。颗粒计数可用于创建缺陷计数图。缺陷可从图2b中讨论的背侧气体g1沉积在背侧表面307上,和/或作为背侧表面307与其他部件(诸如升降杆、凸台346和/或外部支撑表面344)之间接触的结果。颗粒传感器293b被配置为在弹出操作期间测量泄漏的背侧气体g1的泄漏率。设置在系统200的第二腔室203中的一个或多个激光传感器280在基板出入口331下方对齐,使得当基板303朝向(例如,进入)和远离(例如,离开)处理腔室300移送时,基板303移动经过由一个或多个激光传感器280发射的光。一个或多个激光传感器280被配置为每当基板303移动经过由一个或多个激光传感器280发射的光时确定基板303的中心。当基板朝向(例如,进入)处理腔室300移送时,使用一个或多个激光传感器280来确定基板303的中心的预处理位置。当基板被移送远离(例如,离开)处理腔室300时,使用一个或多个激光传感器280来确定基板303的中心的后处理位置。本公开设想颗粒传感器293a、颗粒传感器293b和/或一个或多个激光传感器280的传感器和/或操作可并入光学监测系统340中。
40.本公开设想可将一个或多个激光传感器280设置在处理腔室300中,如设置在基板出入口331下方并安装在侧壁308上。
41.控制器220耦合至处理腔室300,以控制处理腔室300的操作。控制器220包括中央处理单元(cpu)231、包含指令的存储器232和用于cpu 231的支持电路233。cpu 231可以是可在工业环境中使用的任何形式的通用计算机处理器。控制器220直接或通过耦合到处理腔室300的其他计算机和/或控制器(未示出)控制处理腔室300。控制器220是任何形式的通用计算机处理器,其在工业环境中用于控制各种腔室和设备及其上或其中的子处理器。存储器232或非暂时性计算机可读介质是容易获得的存储器中的一者或多者,诸如随机存取存储器(ram)、只读存储器(rom)、软盘、硬盘、闪存驱动器或任何其他形式的本地的或远程的数字存储。支持电路233耦合到cpu 231以用于支持cpu 231。支持电路233包括高速缓存、电源、时钟电路、输入/输出电路系统和子系统等。基板处理参数和操作作为软件例程存储在存储器232中,所述软件例程被执行或调用以将控制器220变成专用控制器,以控制处理腔室300的操作。控制器220被配置成实施本文描述的方法中的任一者。当被执行时,存储在存储器232上的指令使得方法100的操作102-108中的一者或多者被执行。
42.控制器220执行的多个指令包括启用一个或多个传感器291a-291d、一个或多个传感器293a、293b、和/或一个或多个激光传感器280以获得测量值的指令。控制器220的存储器232中的指令可包括除了本文描述的操作之外还可以执行的一个或多个机器学习/人工智能算法。作为示例,由控制器220执行的机器学习/人工智能算法可基于传感器291a-291d、293a、293b和/或280进行的一个或多个传感器测量来改进和/或改变操作参数。操作参数可包括例如缺陷计数、泄漏速率、处理移位和/或经调整的卡紧电压——每一者都在上文中描述。机器学习/人工智能算法可用于多个静电卡盘(esc),以在esc的使用寿命内改进多个esc之间的卡紧操作。
43.图3c是根据一个实施方式的图3a所示的处理腔室300的放大示意图,其中处理腔
室300中有传感器基板装置353。已经使用机器人227将基板303从esc 366上举起并从处理腔室300中移出。机器人227用于将传感器基板装置353放置在esc 366上。传感器基板装置353包括一个或多个基板,诸如第一基板355和位于第一基板355之上的第二基板357。第一基板355和第二基板357的表面限定了空腔359。多个传感器360位于空腔240中,并位于第一基板355与第二基板357之间。第二基板357被卡紧电压吸附到esc 366,使得第二基板357在多个传感器360上施加压缩力。通过监测多个传感器360,在施加卡紧电压期间测量由esc 366施加至传感器基板装置353的所施加力。第一基板355和第二基板357可由硅形成。多个传感器360是压力传感器,诸如弹簧计传感器、压电传感器和/或微机电系统(mems)传感器。传感器基板装置353包括计算模块361。计算模块361可包括用于计算、记录和/或传达在施加卡紧电压期间由esc 366施加至传感器基板装置353的所施加力的测量值的部件(例如,处理器和/或存储器)。例如,可使用发送器或有线连接将测量值传达到控制器220。测量值可存储在传感器基板装置353中,并随后下载到控制器220。
44.传感器360机械地和电气地耦合在第一基板355与第二基板357之间。每个传感器360电耦合到第一基板355上的相应第一导电盘363和/或第二基板357上的第二导电盘365。导电盘363、365可以(例如,通过导电迹线(未示出))电耦合到计算模块361。本公开设想可省略第一导电盘363或第二导电盘365。
45.图4是根据一个实施方式的在第一处理操作后获得的基板303的背侧表面307的缺陷计数图400的示意图。背侧表面307具有存在于其上的多个缺陷401。缺陷计数图400包括多个缺陷401的缺陷计数。多个缺陷401可包括污染物颗粒、划痕和/或碎片。多个缺陷401可能从背侧气体沉积在背侧表面307上和/或作为背侧表面307与诸如升降杆和/或esc表面之类的其他部件之间的接触的结果。
46.图5是根据一个实施方式的支撑在图3a所示的机器人227的机器人叶片226上的基板303的示意性俯视图。随着机器人叶片226和支撑在其上的基板303朝向基板出入口331、朝向esc 336延伸并进入处理腔室300,机器人叶片226和基板303在x-y平面中的第一方向d1上移动。当机器人叶片226和基板303在第一方向d1上移动时,基板303移动经过由第二腔室203中的一个或多个激光传感器280发射的光。当基板303在第一方向d1上移动经过由一个或多个激光传感器280发射的光时,基板303(例如,基板303的外周)阻挡光,且一个或多个激光传感器280被触发。当发射的光不再以与基板303阻挡光之前相同的水平被一个或多个激光传感器280反射并收集时,一个或多个激光传感器280被触发。被基板303阻挡的光用于测量沿着基板303的外周510的多个第一位置501-504。多个第一位置501-504中的每一个都位于x-y平面中,且具有相应的x坐标(x1)和y坐标(y1)。第一位置501-504用于计算在进行第一处理操作之前基板303中心的预处理位置505。
47.当机器人叶片226和支撑在其上的基板303从处理腔室300中撤出、离开esc 366、并离开基板出入口331时,机器人叶片226和基板303在x-y平面中的第二方向d2上移动。随着机器人叶片226和基板303在第二方向d2上移动,基板303移动经过由一个或多个激光传感器280发射的光。当基板303在第二方向d2上移动经过由一个或多个激光传感器280发射的光时,基板303(例如,基板303的外周)阻挡光,且一个或多个激光传感器280被触发。当发射的光不再以与基板303阻挡光之前相同的水平被一个或多个激光传感器280反射并收集时,一个或多个激光传感器280被触发。被基板303阻挡的光用于测量沿着基板303的外周
510的多个第二位置511-514。多个第二位置511-514中的每一个都位于x-y平面中,且具有相应的x坐标(x2)和y坐标(y2)。第二位置511-514用于计算在基板303上进行第一处理操作之后基板303的中心的后处理位置515(例如,已移位的位置)。通过确定后处理位置515与预处理位置505之间的距离来确定后处理位置515与预处理位置505之间的后处理移位520。后处理移位520可包括x轴移位和y轴移位。后处理移位520是预处理位置505与后处理位置515之间的差异(诸如距离)。
48.对于预处理位置505和后处理位置515中的每一者,相应的第一位置501-504和第二位置511-514与基板303的已知参数(诸如半径r1)一起用于毕达哥拉斯计算,以计算预处理位置505和后处理位置515。在一个示例中,第一位置501与第一位置503之间的第一y距离dy1的一半与半径r1一起用于毕达哥拉斯计算,以计算第一y距离dy1与基板303中心的预处理位置505之间的第一x距离dx1。第一位置502与第一位置504之间的第二y距离dy2的一半与半径r1一起用于毕达哥拉斯计算,以计算第二y距离dy2与基板303中心的预处理位置505之间的第二x距离dx2。
49.可相对于参考点530确定预处理位置505和后处理位置515中的每一者,以确定后处理移位520。参考点530可以是沿着机器人叶片226(诸如沿着机器人叶片226的中心轴531)设置的参考点。
50.图6是根据一个实施方式的支撑在图3a所示的机器人227的机器人叶片226上的基板303的示意性侧视图。限定第二腔室203(例如,移送腔室)的容积218的上边界的中心盖30具有通常圆形的开口32,所述开口32用窗口34密封,所述窗口34可以是厚塑料玻璃板,从而允许从上方观察第二腔室203的内部。
51.一个或多个激光传感器280可检测基板303的外周何时阻断穿过第二腔室203的光束36。这可通过多种方式来实现。例如,光源可设置在中央盖30的上方,以便将光束通过窗口34引导到光学检测器的表面上。当光束入射到光学检测器的表面上时,光学检测器的输出具有第一值,而当光束没有入射到光学检测器上时(诸如当光束被基板303阻挡时),光学检测器的输出具有第二值。当基板303的外周穿过光束路径36,从而阻挡从光源(一个或多个激光传感器280)到检测器的路径时,检测器的输出将从第一值变为第二值。通过在检测器输出值改变时记录机器人227的位置,可确定基板303的中心信息。系统200中提供了控制器68。控制器68从机器人227和一个或多个激光传感器280提供的信息中导出基板303的中心信息。如图2中示意性示出的,控制器68可耦合到控制器220。控制器68可与控制器220通信,或者可集成到控制器220中。
52.一个或多个激光传感器280发射光束路径36,并在光束路径36未中断时输出第一值的信号,且在光束路径36被阻挡(诸如被基板303阻挡)时输出第二值的信号。一个或多个激光传感器280中的每一者包括反射传感器38,反射传感器38在单个外壳中具有光源和检测器。反射传感器38可包括由华盛顿州埃弗雷特市的伊顿公司(eaton corporation)制造的彗星(comet)100可见红光反射传感器,dc型号14102a6517。图6示出了一个或多个激光传感器280,所述一个或多个激光传感器280与光源和检测器一起位于第二腔室203的外部。来自反射传感器38的光36被引导穿过中央盖30中的窗口34进入第二腔室203,并朝向第二腔室203的底板。光36从反射器40反射回反射传感器38,且反射传感器38内的检测器检测返回的光束。在一个实施例中,反射器40包括角隅棱镜。角隅棱镜具有将从角隅棱镜表面的法线
起在给定立体角度内入射的所有光线反射回光线源(例如反射传感器)的特性。角隅棱镜通常具有沿着立方体的对角线平面切割的立方体形式,使得立方体只有一个角保持完整。当用作反射器时,角隅棱镜被设置成使得光入射在对角线平面上,并大体上被导向立方体的剩余角。即使角锥棱镜的表面不垂直于入射光线,入射在角锥棱镜反射器表面上的光线也被反射回光线源。因此,当用作本公开的反射器40时,角隅棱镜不需要精确对准。本公开设想可用于反射器40的其他反射器,诸如镜子。角隅棱镜可以是例如由加利福尼亚州柯维纳市的罗林光学器件公司(rolyn optics company)制造、货号为42.0015的角隅棱镜。
53.反射传感器38通过固持器44安装到窗口34,固持器44允许对反射传感器38进行轻微的对准调整。反射器40通过稳定固持器46安装到第二腔室203盖的底部。固持器44和46被设置成使得反射传感器38与反射器40之间的光学路径将在远离机器人叶片226中机器人叶片226(图6中未示出)边缘(例如,在所述边缘外部)设置的位置处与由机器人叶片226正在移送的基板303外周相交。
54.一个或多个激光传感器280在本技术的系统200中使用时具有许多优点。反射传感器38优选地发射和检测调制的可见光激光(诸如红光),从而允许反射传感器38将光束36与通常存在于晶片处理环境中的可见光背景辐射区分开。使反射传感器38内的光学检测器与用于调制输入红光信号的调制信号同步,降低了信号误检测的可能性。一个或多个激光传感器280的检测几何形状和取向还降低了错误信号的可能性。反射传感器38、光束路径36和反射器40表面的法线都定位成与中心盖30中的窗口34的表面成斜角,从而降低了检测到由窗口34或晶片10反射的光的可能性。这种几何形状还降低了背景或环境光源被反射传感器38误检测为基板位置信号的可能性。
55.反射传感器38具有进一步的优点,即当入射到检测器上的光强度高于或低于预定阈值水平时,检测器输出在两个信号水平之间切换,所述两个信号水平对应于计算机系统的典型逻辑1和0。因此,反射传感器38的输出容易与控制基板传输的控制器220和本公开的系统200兼容。如果使用的光学检测器输出的信号与计算机不直接兼容,则方法(诸如信号转换方法)将检测器输出转变成计算机兼容的信号。
56.本公开的益处包括准确确定电压调节、改良卡紧电压和保持目标卡紧力;增强的处理操作和增强的处理精度;减少或消除了基板粘附和/或基板破损的机会;减少或消除基板弹出的机会;减少前侧缺陷和背侧缺陷的发生;以及增加静电卡盘的工作寿命。本公开的益处还包括减少操作时间、减少更换成本和操作成本、减少机器停机时间、减少资源支出和增加产出率。本文描述的技术可确定当施加相同的卡紧电压时,施加至基板上的卡紧力是否已经改变,并有助于在esc寿命期间改进基板间的力控制。此类卡紧力的变化可能是由esc表面(诸如凹陷表面345)上的污染物沉积、esc表面的粗糙化(诸如暴露于等离子体)、和/或esc材料的逐渐移除(诸如在处理迭代中发生的多个凸台346的部分的腐蚀或磨损)造成的。本公开的益处还包括使用现有的腔室设备来基于处理移位的发生而准确地确定是否需要经调整的卡紧电压。
57.相对于涉及测量基板上的电压的常规操作和涉及测量基板上的压力或力的操作,本文所述技术实现了上述益处。本文描述的技术在效率和准确保持目标卡紧电压方面有助于获得优于其他操作的有益结果。作为示例,本文所述的技术有助于获得优于其他操作的有益结果,因为本文所述的技术可精确地考虑到施加至基板上的卡紧力,而不是依赖于腔
室中的电流或电压测量值。作为另一个示例,本文描述的技术可实时、准确地确定何时需要电压调节。
58.尽管前述内容针对本公开的实施例,但在不脱离本公开的基本范围的情况下,可设计本公开的其他实施例。本公开还设想本文描述的实施例的一个或多个方面可代入所描述的其他方面中的一者或多者。本公开的范围由随附的权利要求书确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1