一种波长锁定装置及其工作方法与流程
本发明涉及半导体,具体涉及一种波长锁定装置及其工作方法。
背景技术:
1、波长锁定半导体激光器由于优越的波长稳定性、窄线宽等特性,在材料加工、医疗、工业、国防领域都有广泛的用途,典型的应用为878.6nm系列波长锁定半导体激光器作为纳秒、皮秒、飞秒固体激光器的泵浦源,在精密切割、钻孔、打标和刻蚀上具有一定的应用;976nm系列波长锁定半导体激光器作为超短脉冲、高亮度光纤激光器的泵浦源,在工业和科研军工方向具有一定的应用。
2、国内的波长锁定半导体激光器作为泵浦源方案为:在半导体激光芯片发出的激光经过快轴准直、或者快轴和慢轴同时准直后,经过反射型布拉格光栅透镜(以下称vbg透镜)作为外腔进行选模,之后激光被vbg透镜部分反射注入到半导体激光芯片的前后腔面构成的f-p谐振腔内,满足振荡阈值条件的纵模形成振荡放大,其它纵模则被抑制,形成锁模稳定输出。
3、常规的波长锁定半导体激光器,将vbg透镜放在多个半导体激光芯片在快轴和慢轴准直后的主光路上。该方式对多个半导体激光芯片的合束光斑指向提出了严格要求。由于多个半导体激光芯片发出的光的指向控制具有难度,产品良率不佳,通常表现为:当单个半导体激光芯片的光路变动时则该光路的半导体激光芯片就会失锁。返修的时候需要将vbg透镜拆除并重新调节vbg透镜,返修动作容易导致其它半导体激光芯片的光路变动,不良品返修难度大。
4、对于vbg透镜的调节,通常为人工手动方案。具体的,真空吸嘴或者夹爪夹取vbg透镜,使用光谱仪监测vbg透镜后的光谱作为反馈,通过调整架手动调节vbg透镜的位置,主要是对vbg透镜在快轴上俯仰角度与在慢轴上的偏摆角度进行手动调节,从而达到波长锁定的目的。通过上述的外腔反馈原理知道,在波长满足f-p谐振腔的增益谱范围的前提下,只要回返到f-p谐振腔内的能量强度达到振荡阈值,即可以达到光谱选模锁定的作用。vbg透镜对于入射光在一定的角度范围内都能起到高反射的作用,也即vbg透镜在快轴上俯仰角度与在慢轴上的偏摆角度在一定的范围内,vbg透镜都能将入射光反射进f-p谐振腔内,达到波长锁定目的。常规的vbg透镜的位置调整方法,不仅依赖于人工作业,效率低,最重要的是不能够将vbg透镜固定在最佳的光反馈角度,无法提高光路变动容错能力。
5、半导体激光芯片的发光区非常微小,通常发光区在快轴上的宽度为1微米~2微米,发光区在慢轴上的宽度100微米~300微米,如果不能将vbg透镜的角度固定在最佳位置,细微的光学胶应力、外壳安装扭力导致的外壳微变形,都可能导致被vbg透镜反射的光的能量不够,造成波长失锁。同时为了满足不同的应用条件,市场上对作为泵浦源的锁波长能力提出了近乎苛刻的要求,从以往的单工作电流锁定到现有的全电流锁定、以及在不同的工作温度下锁定,这对反馈光路的调节精度提出了更高的要求,通常vbg透镜在快轴上俯仰角度与在慢轴上的偏摆角度要求控制在0.01mrad级别。
6、然而,现有对vbg透镜的位置调节精度较差。
技术实现思路
1、因此,本发明要解决的技术问题在于解决vbg透镜的位置调节精度较差的问题,从而提供一种波长锁定装置及其工作方法。
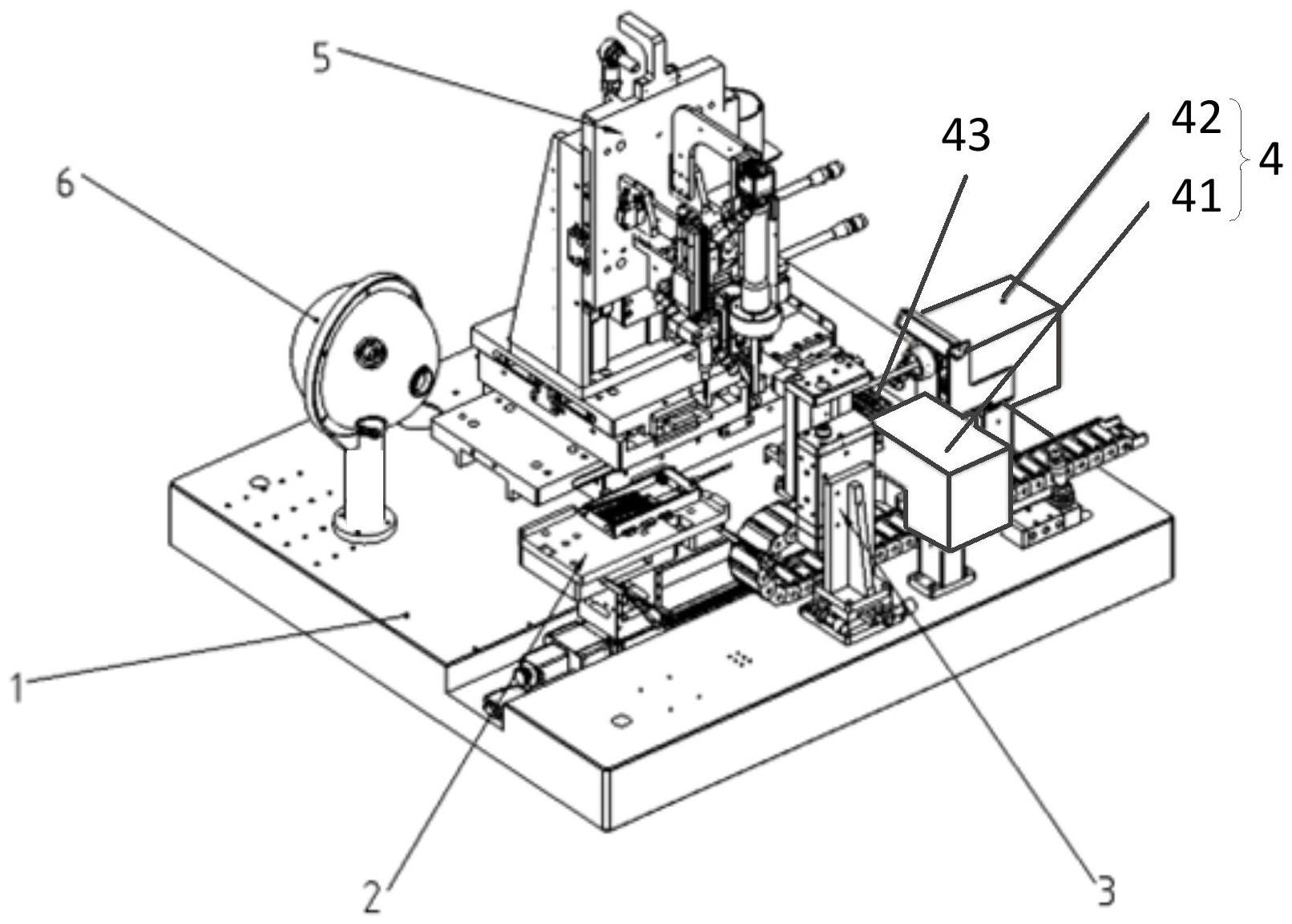
2、本发明提供一种波长锁定装置,包括:承载平台;设置在所述承载平台上间隔的光模块上料组件、体光栅上料组件、第一相机单元、以及抓取和点胶组件;所述光模块上料组件用于承载光模块,所述光模块包括:元件平台和位于元件平台上的半导体激光芯片;所述体光栅上料组件包括:料盒支撑板;所述料盒支撑板上用于放置料盒,所述料盒中用于放置体光栅;抓取和点胶组件,抓取和点胶组件包括:六轴运动单元,所述六轴运动单元包括xyz三轴平移单元和旋转自由度调节单元;点胶单元;抓取单元;第三相机;所述xyz三轴平移单元用于调节点胶单元的位置和第三相机的位置;所述六轴运动单元用于调节抓取单元的位置;所述第三相机用于移动在光模块的上方获取元件平台表面的点胶预设位置;所述抓取单元用于从料盒中夹取体光栅,所述第一相机单元用于获取体光栅被抓取单元夹持时在初始位置区域的特征图像,所述旋转自由度调节单元用于根据特征图像调节体光栅在初始位置区域围绕x轴、y轴和z轴的旋转角度,x轴垂直于半导体激光芯片的出光面,z轴垂直于元件平台的上表面,y轴与x轴和z轴均垂直;所述xyz三轴平移单元还用于通过抓取单元驱动体光栅自初始位置区域移动至点胶预设位置;所述点胶单元用于将体光栅点胶固定在点胶预设位置。
3、可选的,料盒支撑板中具有第一槽;料盒适于位于所述第一槽中;所述体光栅上料组件还包括:立方分光棱镜,位于所述第一槽侧部的料盒支撑板的顶面;所述第一相机单元包括第一相机和第二相机,第一相机位于料盒支撑板的侧部且位于第一槽背离立方分光棱镜的一侧,所述第一相机还用于获取点胶单元的位置信息;所述第二相机位于所述料盒支撑板背离所述光模块上料组件的一侧。
4、可选的,所述xyz三轴平移单元包括:x轴坐标调节部件、y轴坐标调节部件、z轴坐标调节部件;所述旋转自由度调节单元包括x轴旋转自由度调节部件、y轴旋转自由度调节部件和z轴旋转自由度调节部件。
5、可选的,抓取和点胶组件还包括:固化灯,固化灯与z轴旋转自由度调节部件固定,所述固化灯用于对点胶预设位置的胶进行固化。
6、可选的,所述点胶单元包括点胶气缸和设置在点胶气缸下方的点胶针管,所述点胶气缸用于驱动点胶针管上下运动。
7、可选的,所述光模块上料组件通过第一驱动滑台设置在承载平台上,第一驱动滑台用于驱动光模块上料组件沿平行于承载平台的上表面移动;所述波长锁定装置还包括:上电探针组件,所述上电探针组件用于给所述半导体激光芯片加电。
8、可选的,还包括:积分球,设置在承载平台上;光纤;积分球的入光口通过光纤和元件平台上的体光栅的出光面连接;光谱仪,与积分球的出光口连接。
9、可选的,所述光模块上料组件包括:冷却载台和上载台,冷却载台中具有冷却件,上载台位于冷却载台上方;半导体制冷片,位于冷却件和上载台之间;温度传感器,与上载台连接;所述冷却载台通过第六连接件与第一驱动滑台连接;所述元件平台用于设置在所述上载台上。
10、可选的,所述光模块中的半导体激光芯片为若干个;所述光模块还包括:若干个快轴准直透镜,快轴准直透镜与半导体激光芯片一一对应;若干个主反射镜,主反射镜与快轴准直透镜一一对应;若干个慢轴准直透镜,若干个慢轴准直透镜与主反射镜一一对应;快轴准直透镜位于慢轴准直透镜和半导体激光芯片之间的光路中;慢轴准直透镜位于主反射镜和快轴准直透镜之间的光路中;聚焦透镜单元,所述聚焦透镜单元适于将从若干个主反射镜反射的光束进行聚焦并注入到耦合光纤中;若干个体光栅用于设置在所述光模块中,所述体光栅与所述半导体激光芯片一一对应;体光栅用于位于慢轴准直透镜和快轴准直透镜之间;或者,体光栅用于位于慢轴准直透镜和主反射镜之间。
11、本发明还提供一种波长锁定装置的工作方法,包括:提供本发明的波长锁定装置;步骤s1:将光模块放置在光模块上料组件上;将装有体光栅的料盒放置在料盒支撑板上;步骤s2:六轴运动单元调节抓取单元的位置,抓取单元从料盒中夹取体光栅;步骤s3:xyz三轴平移单元驱动第三相机移动在光模块的上方,第三相机获取元件平台表面的点胶预设位置;步骤s4:xyz三轴平移单元驱动抓取单元将体光栅置于初始位置区域;步骤s5:第一相机单元获取体光栅在初始位置区域的特征图像;步骤s6:旋转自由度调节单元根据特征图像调节体光栅在初始位置围绕x轴、y轴和z轴的旋转角度,使体光栅的受光面和半导体激光芯片的出光面之间的夹角小于第一角度阈值,使得体光栅的垂直于受光面的侧壁表面与y轴之间的夹角小于第二角度阈值,使体光栅的底部表面和元件平台的上表面之间的夹角小于第三角度阈值;步骤s7:步骤s6之后,xyz三轴平移单元通过抓取单元驱动体光栅自初始位置区域移动至点胶预设位置;步骤s8:点胶单元将体光栅点胶固定在点胶预设位置。
12、可选的,料盒支撑板中具有第一槽;将装有体光栅的料盒放置在料盒支撑板上的步骤包括:将装有体光栅的料盒放在第一槽中;所述体光栅上料组件还包括:立方分光棱镜,位于所述第一槽侧部的料盒支撑板的顶面;所述第一相机单元包括第一相机和第二相机,第一相机位于料盒支撑板的侧部且位于料盒背离立方分光棱镜的一侧,所述第二相机位于所述料盒支撑板背离所述光模块上料组件的一侧;xyz三轴平移单元驱动抓取单元将体光栅置于初始位置区域的步骤包括:xyz三轴平移单元驱动抓取单元将体光栅置于立方分光棱镜和第一相机之间的第一位置;xyz三轴平移单元驱动抓取单元将体光栅的中心点置于立方分光棱镜的顶部上方的第二位置;xyz三轴平移单元驱动抓取单元将体光栅的中心点置于第二相机和光模块上料组件之间的第三位置;第一相机单元获取体光栅在初始位置区域的特征图像的步骤包括:当体光栅的中心点在第一位置时,第一相机获取体光栅的受光面的第一子图像;当体光栅的中心点在第二位置时,第一相机获取体光栅的底面的第二子图像;当体光栅的中心点在第三位置时,第二相机获取体光栅一侧垂直于受光面的侧壁表面的图像。
13、可选的,所述光模块上料组件通过第一驱动滑台设置在承载平台上;所述波长锁定装置还包括:上电探针组件;所述波长锁定装置的工作方法还包括:在步骤s3至步骤s7之前,第一驱动滑台驱动光模块上料组件沿平行于承载平台的上表面移动至上电探针组件的侧部;第一驱动滑台驱动光模块上料组件沿平行于承载平台的上表面移动至上电探针组件的侧部之后,上电探针组件给所述半导体激光芯片加电。
14、可选的,所述波长锁定装置还包括:积分球,设置在承载平台上;光纤;积分球的入光口通过光纤和元件平台上的体光栅的出光面连接;光谱仪,与积分球的出光口连接:所述抓取和点胶组件还包括:固化灯;所述波长锁定装置的工作方法还包括:上电探针组件给所述半导体激光芯片加电之后,且在进行步骤s7之后,根据光谱仪的信号采用旋转自由度调节单元对体光栅在点胶预设位置上围绕x轴、y轴和z轴的旋转角度进行第一调节;点胶单元将体光栅点胶固定在点胶预设位置的步骤包括:进行第一调节之后,点胶单元将胶涂覆在点胶预设位置;所述固化灯对点胶预设位置的胶进行固化。
15、可选的,点胶单元将体光栅点胶固定在点胶预设位置的步骤还包括:点胶单元将胶涂覆在点胶预设位置之后,且在所述固化灯对点胶预设位置的胶进行固化之前,根据光谱仪的信号采用旋转自由度调节单元对体光栅在点胶预设位置上围绕x轴、y轴和z轴的旋转角度进行第二调节。
16、可选的,所述光模块上料组件包括:冷却载台和上载台,冷却载台中具有冷却件,上载台位于冷却载台上方;半导体制冷片,位于冷却件和上载台之间;温度传感器,与上载台连接;所述冷却载台通过第六连接件与第一驱动滑台连接;将光模块放置在光模块上料组件上的步骤包括:将所述元件平台设置在所述上载台上;所述波长锁定装置的工作方法还包括:采用冷却载台对上载台进行冷却;采用半导体制冷片调节上载台的温度;采用温度传感器获取上载台的温度。
17、本发明的技术方案具有以下有益效果:
18、本发明技术方案中的波长锁定装置,所述六轴运动单元用于调节抓取单元的位置;所述第三相机用于移动在光模块的上方获取元件平台表面的点胶预设位置;所述抓取单元用于从料盒中夹取体光栅,所述第一相机单元用于获取体光栅被抓取单元夹持时在初始位置区域的特征图像,所述旋转自由度调节单元用于根据特征图像调节体光栅在初始位置区域围绕x轴、y轴和z轴的旋转角度,x轴垂直于半导体激光芯片的出光面,z轴垂直于元件平台的上表面,y轴与x轴和z轴均垂直;所述xyz三轴平移单元还用于通过抓取单元驱动体光栅自初始位置区域移动至点胶预设位置;所述点胶单元用于将体光栅点胶固定在点胶预设位置。整个作业过程,可以实现体光栅工艺过程的全自动化作业,包括自动识别自适应抓取体光栅,实现体光栅的位置精准调节定位。
- 还没有人留言评论。精彩留言会获得点赞!