一种高精度环氧贴片机及快速贴片方法与流程
本发明涉及半导体封装的,尤其是指一种高精度环氧贴片机及快速贴片方法。
背景技术:
1、半导体封装是将晶圆加工并得到所需要的独立芯片的过程,包括将晶圆切割为小的晶片,然后将小晶片粘贴到基板上并进行引脚焊接构成电路,以及对独立的晶圆用塑料外壳封装保护等操作。其中,贴片是指将切割好的晶片粘贴到基板上的过程,贴片依赖的基本技术是晶片和基板的图像识别及定位技术,即通过相机对晶片、点胶位置、贴片位置均进行拍照,并经过计算机视觉处理进行坐标定位,再通过设备对基板上指定位置进行点胶以及将已经定位的晶片移送到粘贴位置。
2、相关技术中,现有的贴片设备包括用于承载晶片的晶圆托盘机构、顶针、晶片抓取机构、基板台、高倍相机、低倍相机和点胶机构,晶圆放置在晶圆托盘机构上,晶圆托盘机构和基板台均为水平位移平台,顶针设置在晶圆托盘机构下方。高倍相机和低倍相机固定安装在晶片抓取机构上随晶片抓取机构同步移动从而避免相机与运动机构的运动干涉。在贴片过程中首先需要通过摄像机对晶片的位置、参考点位置、晶片预定粘贴位置分别拍照,然后设备根据计算机处理结果确定晶片姿态和位置坐标、基板上参考点坐标以及预定粘贴位置的坐标,由于高倍相机取景范围十分有限,为了减少未完整拍照到目标使计算机处理结果会出现偏差的情况,先通过低倍相机对目标预定位再用高倍相机进行拍照,低倍相机和高倍相机的配合拍照均需要依赖晶片抓取机构的位移来对准拍照目标。设备的整体工作步骤依次为:1.低倍相机拍照晶圆确定晶片位置;2.高倍相机对晶片位置精确拍照;3.晶圆托盘机构调整晶片位置使晶片位移至顶针正上方;4.顶针与晶片抓取机构配合抓取晶片;5.晶片抓取机构将晶片移送至基板台上方;6.低倍相机拍照基板上参考点确定参考点位置;7.高倍相机拍照参考点位置;8.基板台调整基板位置,点胶机构点胶;9.晶片抓取机构放置晶片完成粘贴;10.晶片抓取机构回到晶圆上方;11.重新完成步骤1使低倍相机拍照确定下一枚晶片的位置,如此循环直至完成基板上芯片的全部贴片工作。
3、但本技术的申请人在实现上述技术方案的过程中,发现上述技术存在如下技术问题:从晶片的定位至完成单个晶片粘贴的过程中晶片抓取结构的运动轨迹长、步骤较多,导致贴片效率低。
技术实现思路
1、为此,本发明通过提供一种高精度环氧贴片机及快速贴片方法,解决了现有技术中设备从抓取单个晶片至完成单个晶片粘贴的过程中抓取结构运动轨迹长、步骤多导致贴片效率低的问题,实现了保证晶片贴片精度的同时提升了贴片效率的效果。
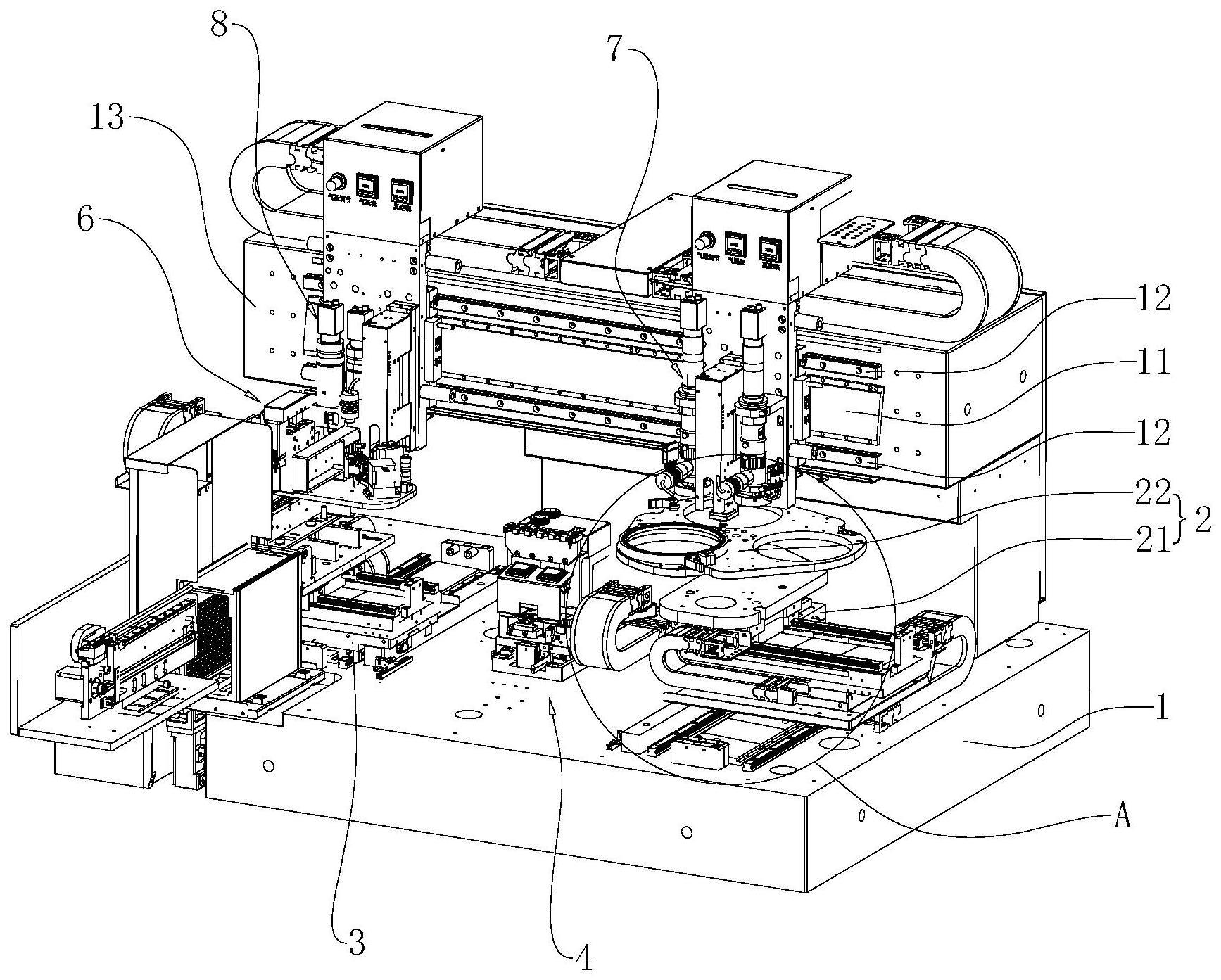
2、为解决上述技术问题,第一方面,本发明提供了一种高精度环氧贴片机,包括机架,用于存放目标晶片的托盘机构、用于放置基板的基板平台机构,托盘机构和基板平台机构均设置在机架上,其特征在于:还包括取晶模组、固晶模组和中继台,所述中继台设置在机架上且位于托盘机构和基板平台机构之间;所述取晶模组被配置为将目标晶片从托盘机构运送至中继台,其包括二号低倍相机,所述二号低倍相机被配置为对所述目标晶片进行拍照定位;所述固晶模组被配置为将目标晶片从中继台运送至基板平台机构,以及将目标晶片放置到相应基板上;所述固晶模组包括一号低倍相机和高倍相机,所述一号低倍相机被配置为对目标晶片位置和目标晶片的粘贴位置进行初步定位,所述高倍相机被配置为对目标晶片位置和目标晶片的粘贴位置进行精确定位。
3、在本发明的一个实施例中,所述机架上设置有驱动轨架,所述取晶模组和固晶模组均与驱动轨架滑动配合,所述取晶模组还包括三号低倍相机和取晶头,所述二号低倍相机和三号低倍相机分别设置在取晶头沿驱动轨架运动方向上的前侧和后侧,其中所述二号低倍相机位于取晶头靠近固晶模组的一侧。
4、在本发明的一个实施例中,所述中继台为具有x轴水平位移及绕z轴旋转功能的运动平台。
5、在本发明的一个实施例中,所述托盘机构包括底座和晶盘,所述底座为xy轴位移平台,所述晶盘用于放置晶圆,所述晶圆固定安装在底座顶部的动平台上。
6、在本发明的一个实施例中,所述基板平台机构为xy轴位移平台,所述基板平台机构处设有点胶机构,所述点胶机构包括驱动组件、位移架、点胶头和存胶盒,所述驱动组件包括一个直线滑台和升降滑台,所述升降滑台安装在直线滑台的滑块上,所述位移架安装在升降滑台的滑块上,所述点胶头安装在位移架上,所述直线滑台的轨道侧壁上固定连接有一块托板,所述托板位于位移架在直线滑台驱动下运动轨迹的下侧,所述存胶盒安装在托板上。
7、在本发明的一个实施例中,所述存胶盒呈圆盘状,所述存胶盒与托板转动连接,所述托板上设置有驱动电机,所述驱动电机通过带传动驱动同步带轮转动,所述存胶盒的上侧开设有与存胶盒同轴的环型胶槽,所述环形胶槽内固设有与环形胶槽轮廓适配的弧形刮胶板。
8、在本发明的一个实施例中,所述托板上固定安装有升降驱动机构,所述升降驱动机构的动作模块上固设有限位块,所述弧形刮胶板上开设有限位槽,所述限位块底端与限位槽相适配,当所述限位块插入限位槽时阻止弧形刮胶板随存胶盒的转动运动。
9、在本发明的一个实施例中,所述驱动轨架上设置有水平设置的直线电机轨道,所述取晶动力托架和固晶动力托架上均设置有与直线电机轨道适配的直线电机滑台。
10、在本发明的一个实施例中,所述一号低倍相机与高倍相机共用同一个相机镜头。
11、第二方面,本发明提供了一种高精度快速贴片方法,包括以下步骤:s1、取晶模组对晶圆上的目标晶片进行定位,根据定位结果调整目标晶片至第一位置,取晶模组对目标晶片进行抓取;s2、固晶模组对基板上参考点进行定位初步定位,确定基板上参考点位置,随后固晶模组对参考点进行精确定位,同时取晶模组携带目标晶片向中间位置运动,在取晶模组向中间位置运动的过程中取晶模组对下一颗目标晶片进行定位;s3、固晶模组根据s2中精确定位结果确定点胶位置和贴片的第二位置坐标,取晶模组将目标晶片运送至中间平台,同时下一颗目标晶片被调整至第一位置;s4、取晶模组向第一位置运动,固晶模组向中间位置运动,当固晶模组离开基板上方后点胶机构进行点胶动作,取晶模组向第一位置运动的过程中对中间平台处目标晶片进行初步定位,随后根据初步定为结构调整目标晶片位置和姿态;s5、固晶模组对中间平台处的目标晶片进行精确定位,根据精确定位结果精确调整目标晶片位置和姿态,随后固晶模组抓取目标晶片并向第二位置运动,取晶模组完成s4中对中间平台出目标晶片的初步定位后对第一位置处的下一颗目标晶片进行定位,确保下一颗目标晶片位于第一位置;s6、固晶模组将目标晶片运送至第二位置并进行贴片动作,取晶模组对下一颗目标晶片进行抓取;s7、重复步骤s2-s6,直至结束加工。
12、本发明的上述技术方案相比现有技术具有以下优点:
13、本发明所述的一种高精度环氧贴片机及快速贴片方法,通过设置取晶模组、固晶模组和中继台,将单个晶片的抓取和运送轨迹分割,由取晶模组从晶圆上抓取晶片并运送至中继台,再由固晶模组抓取中继台上存放的晶片并运送至基板处进行贴片动作,从而使贴片和取片动作所需的时间缩短和重叠,有效的缩减了整个动作流程所需的时间;
14、另一方面,本发明的技术方案在取晶模组处不设高倍相机,而是设置二号低倍相机,并在固晶模组处设置一号低倍相机和高倍相机,在取晶模组抓取晶片时通过二号低倍相机对晶片进行初步定位而省略了高倍相机的拍照定位,当晶片送至中继台后先由取晶模组处低倍相机对中继台处晶片拍照定位,再由固晶模组的高倍相机配合对晶片、点胶位置和粘贴位置进行精确定位从而保证了贴片精度,同时,取晶模组和固晶模组的运动相对独立,在其中一个模组处的相机进行拍照时,另一个模组仍然可以处理工艺的其它步骤,因此在保证了贴片精度的同时极大的提升了加工效率。
- 还没有人留言评论。精彩留言会获得点赞!