一种具有全并行加工模块的双组合设备稳态调度方法
本发明涉及半导体加工设备,尤其涉及具有全并行加工模块的双组合设备稳态调度方法。
背景技术:
1、组合设备具有高柔性的特点,可为单片晶圆提供稳定的加工环境,被广泛地应用于半导体晶圆制造中。但是,组合设备运行过程中面临诸多工艺约束,导致设备的调度和控制迎来巨大挑战。研究组合设备在不同工艺要求下的调度问题,一直是学术界和工业界的热点问题。
2、组合设备主要由若干个加工模块(processing module,pm)、两个真空锁(loadlock,ll)和传输机械手(transport robot,tr)组成,tr被安置在设备中央,pm和ll呈径向排列,根据机械手结构,可分为单臂/双臂组合设备。设备运行时,tr从ll中卸载未加工晶圆,按照设定的生产配方依次访问pm,完成所有工序后并返回至ll。由于配置了两个ll,保证组合设备可以不间断地运行。双组合设备由两个组合设备通过缓冲模块(buffermodule,bm)连接构成,bm被两个设备共享,起到传递晶圆的作用。实际生产过程中,组合设备长时间处于稳态加工,此时设备满负荷加工晶圆且周期性地运转。
3、现有的调度和控制方法,一般只涉及到单个组合设备。当前晶圆厂倾向于将多道工艺合并为一道工序,并通过配置多个并行pm进行晶圆加工。在这种情形下,具有全并行加工模块的双组合设备调度过程更具有挑战性。因此,研究具有全并行加工模块的双组合设备的调度和控制技术,可有效提高设备的生产率,降低企业生产成本。
技术实现思路
1、为解决上述技术问题,本发明的目的是提供一种具有全并行加工模块的双组合设备稳态调度方法,该方法可有效提高设备的生产率,从而降低企业生产成本。
2、本发明的目的通过以下的技术方案来实现:
3、一种具有全并行加工模块的双组合设备稳态调度方法,包括:
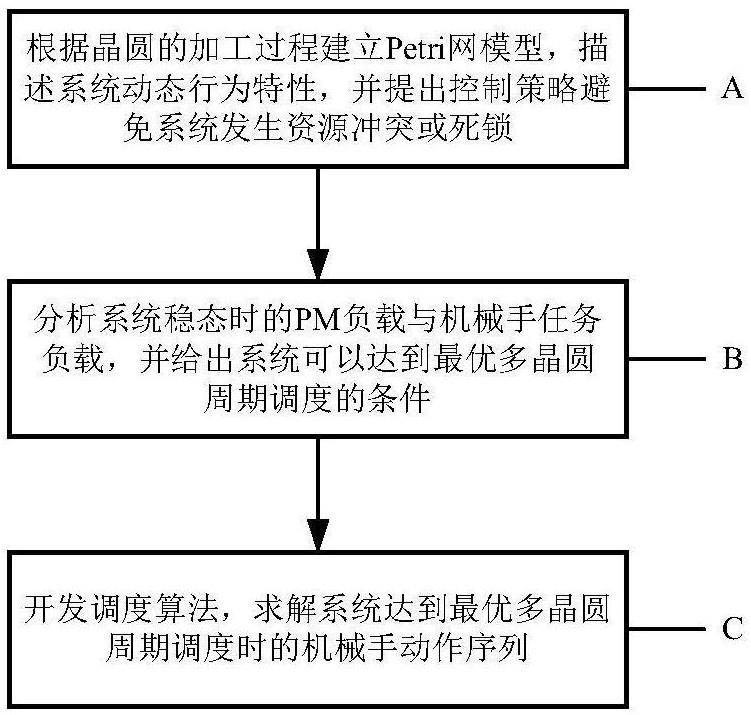
4、a部分根据晶圆的加工过程建立petri网模型,描述系统动态行为特性,并提出控制策略避免系统发生资源冲突或死锁;
5、b部分分析系统稳态时的pm负载与机械手任务负载,并给出系统可以达到最优多晶圆周期调度的条件;
6、c部分开发调度算法,求解系统达到最优多晶圆周期调度时的机械手动作序列。
7、与现有技术相比,本发明的一个或多个实施例具有如下优点:
8、实现了具有全并行加工模块的双组合设备周期调度,并达到了系统的最优调度周期时间,可有效提高设备的生产率,降低企业生产成本。
技术特征:
1.一种具有全并行加工模块的双组合设备稳态调度方法,所述方法包如下步骤:
2.如权利要求书1所述的具有全并行加工模块的双组合设备稳态调度方法,双组合设备的特征与加工过程如下:
3.如权利要求书1所述的具有全并行加工模块的双组合设备稳态调度方法,其特征在于,根据晶圆制造过程建立petri网模型:
4.如权利要求书1所述的具有全并行加工模块的双组合设备稳态调度方法,其特征在于,稳态时机械手的动作分析如下:
5.如权利要求书1所述的具有全并行加工模块的双组合设备稳态调度方法,其特征在于,稳态时系统达到最优周期调度的条件是:
6.一种具有全并行加工模块的双组合设备稳态调度方法,该方法可实现系统的最优稳态周期调度。与现有技术相比,本发明的一个或多个实施例具有如下优点:实现了具有全并行加工模块的双组合设备周期调度,并达到了系统的最小周期时间,可有效提高设备的生产率,降低企业生产成本。
技术总结
本发明公开了一种具有全并行加工模块的双组合设备稳态调度方法。首先,根据晶圆的加工过程建立Petri网模型,描述系统的动态行为特性,并提出控制策略避免系统发生资源冲突或死锁。其次,分析系统稳态时的加工模块负载与机械手任务负载,并给出系统可以达到最优多晶圆周期调度的条件。最后,开发了两个算法求解系统达到最优多晶圆调度时的周期时间和机械手动作序列。
技术研发人员:熊文清,潘春荣,周浩,崔煜,吴冠中
受保护的技术使用者:江西理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!