定位装置及方法与流程
本发明涉及芯片贴合设备,尤其是涉及一种定位装置及方法。
背景技术:
1、相关技术中,芯片需要贴合在基板上。通常将芯片贴合在基板之前,需要将芯片的位置和基板的焊点位置进行精准定位。在对准前会先检测芯片和基板的位置,具体地,检测的方式为:焊头吸取芯片,焊头吸取芯片后,将焊头移动到上视相机上方进行芯片视觉成像,获得芯片视觉成像后,进行位置对比;之后,再将下视相机移动到焊点上方进行焊点视觉成像,获得焊点视觉成像后,进行位置比对。进一步地,当芯片视觉成像和焊点视觉成像分别完成位置比对后,根据检测结果,可以移动芯片或者焊点的位置,从而使芯片和焊点对准。最后驱动部件使焊头移动到焊点上进行贴合即可。
2、在上述定位检测方式中,由于需要两个相机(即上视相机和下视相机)分别对焊头和焊点完成先后识别,因此,两个相机会导致检测的步骤较多,从而导致检测效率较慢,同时也会导致多次移动造成机械误差,影响定位精度。进一步地,由于检测效率较慢,因此会导致定位装置定位效率过低。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种定位装置,能够具有较快的定位效率。
2、本发明还提出一种定位方法。
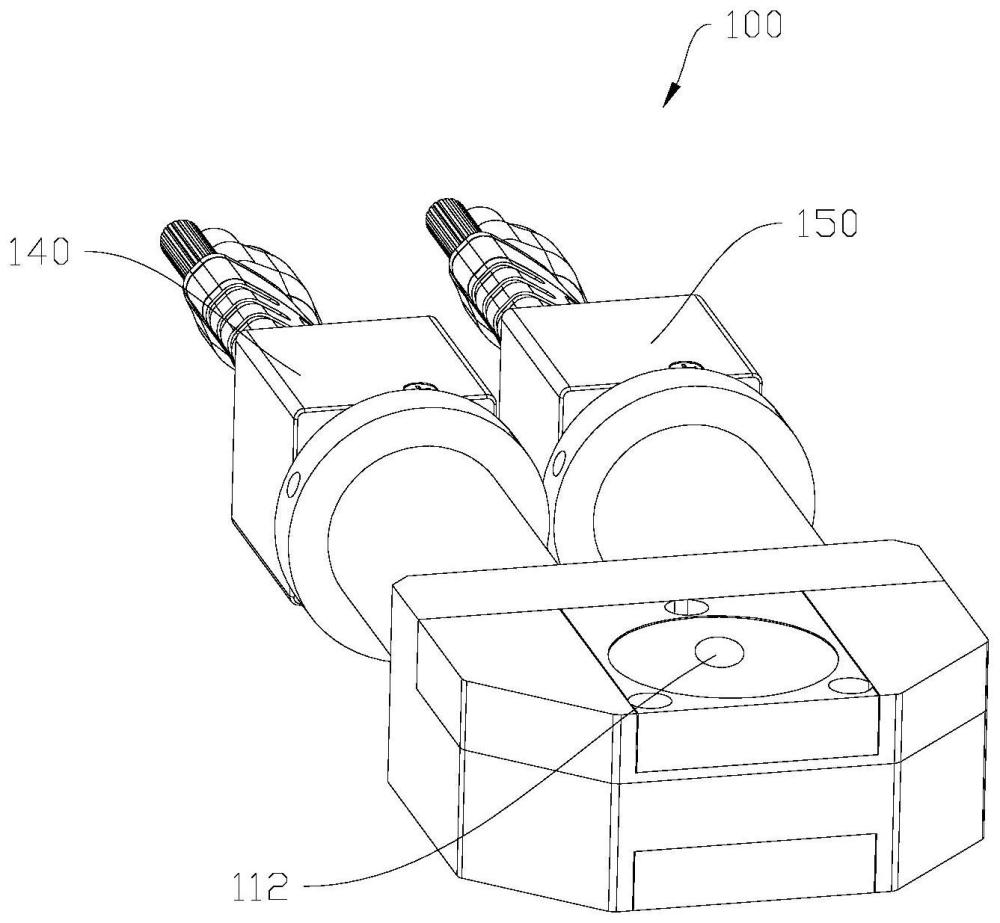
3、根据本发明的第一方面实施例的定位装置,包括:
4、检测组件,所述检测组件包括:
5、壳体,设置有容纳腔以及与所述容纳腔连通的第一通孔和第二通孔,所述第一通孔和所述第二通孔相对设置,所述第一通孔用于与芯片对应,所述第二通孔用于与基板对应;
6、第一光源,设置于所述容纳腔中,所述第一光源的光线用于照射所述芯片,并在所述容纳腔中形成第一光路;
7、第二光源,设置于所述容纳腔中,所述第二光源的光线用于照射所述基板,并在所述容纳腔中形成第二光路;
8、第一相机,设置于所述容纳腔中,所述第一相机用于接收所述第一光路的光线,以生成所述芯片的图像;
9、第二相机,设置于所述容纳腔中,所述第二相机用于接收所述第二光路的光线,以生成所述基板的图像。
10、根据本发明实施例的定位装置,至少具有如下有益效果:通过第一相机接收到第一光路的光线后,第一相机可以生成芯片的图像,通过第二相机接收到第二光路的光线后,第二相机可以生成基板的图像,如此,检测组件可以同时获得芯片和基板的图像,与现有技术中通过两个相机先后获得芯片和基板的图像相比,本申请的定位装置的检测组件的检测效率更高,从而具有该检测组件的定位装置的定位效率较快。
11、根据本发明的一些实施例的定位装置,所述检测组件还包括双面棱镜、第一单面棱镜和第二单面棱镜,所述双面棱镜位于所述第一通孔和所述第二通孔之间,所述双面棱镜包括相对设置的第一面和第二面,所述第一光源的光线依次经过所述芯片、所述第一面和所述第一单面棱镜以形成所述第一光路,所述第二光源的光线依次经过所述基板、所述第二面和所述第二单面棱镜以形成所述第二光路。
12、根据本发明的一些实施例的定位装置,所述第一光源包括第一底座和多个第一发光件,所述第一发光件能够发光,所述第一底座设置有与所述第一通孔连通的第三通孔,多个所述第一发光件围绕于所述第三通孔的中心周向设置。
13、根据本发明的一些实施例的定位装置,所述第二光源包括第二底座和多个第二发光件,所述第二发光件能够发光,所述第二底座设置有与所述第二通孔连通的第四通孔,多个所述第二发光件围绕于所述第四通孔的中心周向设置。
14、根据本发明的一些实施例的定位装置,所述定位装置还包括第一驱动组件,所述第一驱动组件用于驱动所述芯片相对于所述基板运动。
15、根据本发明的一些实施例的定位装置,所述定位装置还包括第二驱动组件,所述第二驱动组件连接于所述检测组件,所述第二驱动组件用于驱动所述检测组件运动。
16、根据本发明的第二方面实施例的定位方法,通过第一方面实施例中任一项所述的定位装置对芯片和基板定位,所述定位方法包括以下步骤:
17、使所述检测组件位于所述芯片和所述基板之间,并同时获得所述芯片和所述基板的实时图像;
18、将所述芯片的实时图像和芯片预设图像比对,将所述基板的实时图像和基板预设图像比对,从而分析并得出偏差值,并判断是否需要移动所述芯片或者所述基板;
19、当需要移动所述芯片或者所述基板时,通过所述偏差值使所述芯片相对于所述基板运动,从而完成定位。
20、根据本发明实施例的定位方法,至少具有如下有益效果:通过将检测组件位于芯片和基板之间后,能够同时获得芯片和基板的实时图像,之后根据芯片的实时图像和基板的实时图像可以得出偏差值,通过偏差值能够使芯片相对于基板运动,从而完成芯片和基板的定位。如此,定位方法通过检测组件同时获得芯片和基板的图像后,定位方法能够使芯片和基板定位的效率较快。
21、根据本发明的一些实施例的定位方法,当所述芯片的尺寸大于所述第一相机的视场时,使所述检测组件多次运动,以获得所述芯片的全部图像。
22、根据本发明的一些实施例的定位方法,当所述基板的尺寸大于所述第二相机的视场时,使所述检测组件多次运动,以获得所述基板的全部图像。
23、根据本发明的一些实施例的定位方法,在所述使检测组件位于所述芯片和所述基板之间,并同时获得所述芯片和所述基板的图像之前,所述定位方法还包括步骤:对所述第一相机和所述第二相机进行调节标定。
24、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.定位装置,其特征在于,包括:
2.根据权利要求1所述的定位装置,其特征在于,所述检测组件还包括双面棱镜、第一单面棱镜和第二单面棱镜,所述双面棱镜位于所述第一通孔和所述第二通孔之间,所述双面棱镜包括相对设置的第一面和第二面,所述第一光源的光线依次经过所述芯片、所述第一面和所述第一单面棱镜以形成所述第一光路,所述第二光源的光线依次经过所述基板、所述第二面和所述第二单面棱镜以形成所述第二光路。
3.根据权利要求1所述的定位装置,其特征在于,所述第一光源包括第一底座和多个第一发光件,所述第一发光件能够发光,所述第一底座设置有与所述第一通孔连通的第三通孔,多个所述第一发光件围绕于所述第三通孔的中心周向设置。
4.根据权利要求1所述的定位装置,其特征在于,所述第二光源包括第二底座和多个第二发光件,所述第二发光件能够发光,所述第二底座设置有与所述第二通孔连通的第四通孔,多个所述第二发光件围绕于所述第四通孔的中心周向设置。
5.根据权利要求1所述的定位装置,其特征在于,所述定位装置还包括第一驱动组件,所述第一驱动组件用于驱动所述芯片相对于所述基板运动。
6.根据权利要求5所述的定位装置,其特征在于,所述定位装置还包括第二驱动组件,所述第二驱动组件连接于所述检测组件,所述第二驱动组件用于驱动所述检测组件运动。
7.定位方法,其特征在于,通过权利要求1至6中任一项所述的定位装置对芯片和基板定位,所述定位方法包括以下步骤:
8.根据权利要求7所述的定位方法,其特征在于,当所述芯片的尺寸大于所述第一相机的视场时,使所述检测组件多次运动,以获得所述芯片的全部图像。
9.根据权利要求8所述的定位方法,其特征在于,当所述基板的尺寸大于所述第二相机的视场时,使所述检测组件多次运动,以获得所述基板的全部图像。
10.根据权利要求7所述的定位方法,其特征在于,在所述使检测组件位于所述芯片和所述基板之间,并同时获得所述芯片和所述基板的图像之前,所述定位方法还包括步骤:对所述第一相机和所述第二相机进行调节标定。
技术总结
本发明公开了一种定位装置,包括:检测组件,检测组件包括:壳体,设置有容纳腔以及与容纳腔连通的第一通孔和第二通孔,第一通孔和第二通孔相对设置,第一通孔用于与芯片对应,第二通孔用于与基板对应;第一光源,设置于容纳腔中,第一光源的光线用于照射芯片,并在容纳腔中形成第一光路;第二光源,设置于容纳腔中,第二光源的光线用于照射基板,并在容纳腔中形成第二光路;第一相机,设置于容纳腔中,第一相机用于接收第一光路的光线,以生成芯片的图像;第二相机,设置于容纳腔中,第二相机用于接收第二光路的光线,以生成基板的图像。本发明的定位装置,能够具有较快的定位效率及较高的定位精度。
技术研发人员:郭战锋,肖泽鹏
受保护的技术使用者:深圳市联微半导体设备有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!