一种开盒方法与流程
本技术涉及半导体制备,特别涉及一种开盒方法,用于efem开盒的控制。
背景技术:
1、随着集成电路制造工艺的不断缩小,晶圆制造环境的洁净度要求越来越高。晶圆在制造、处理和封装环节中极易受微小颗粒、化学污染等影响,导致晶圆表面缺陷增加,良率降低。如何提高晶圆的制造良率,是半导体行业亟需解决的问题。
2、晶圆盒是晶圆在制造和运输过程中的重要载体和屏障。目前,晶圆盒的开盒过程主要依靠操作人员经验,缺乏气体洁净度和温湿度的实时监控。而气体中的微小颗粒污染以及温湿度的不稳定直接影响开盒环境,可能导致开盒后的晶圆表面质量下降。
3、在相关技术中,比如中国专利文献cn111090295a中提供了一种efem中环境参数的控制方法及控制系统。控制方法包括:在efem的外部设置一个具有设定体积的洁净空间;去除洁净空间内的预定杂物;使洁净空间内的温度加热至预定温度后向efem内部送风;根据efem内部的温度和湿度动态调节洁净空间内的加热温度,以使efem内部恒温恒湿。本技术在efem的外部设置洁净空间,通过对洁净空间进行酸、碱、挥发性有机化合物、颗粒物等杂质的过滤去除后向efem内部输送无尘高温气体,并通过动态调节洁净空间内的温度使efem处于恒温恒湿环境,保证晶圆在efem传送过程中不会出现气体在晶圆表面结露的情况,但是本技术至少存在:缺乏智能优化控制策略,无法适应efem内环境的复杂变化,从而导致晶圆的制造良率有待进一步提高。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的晶圆的良率低的问题,本技术提供了一种开盒方法,用于efem开盒的控制,通过多级气体过滤、温湿度精确控制和自适应过滤策略等,可以实现开盒环境的气体洁净度和温湿度稳定在理想状态,从而有效提高晶圆的制造良率。
3、2.技术方案
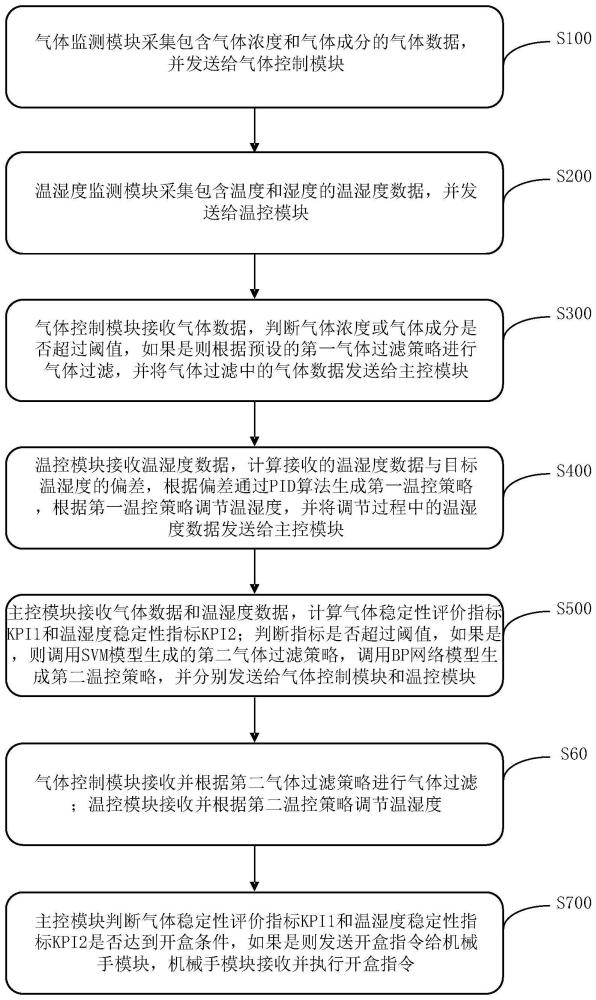
4、本技术的目的通过以下技术方案实现一种开盒方法,包括:步骤一,气体监测模块采集包含气体浓度和气体成分的气体数据,并发送给气体控制模块;步骤二,温湿度监测模块采集包含温度和湿度的温湿度数据,并发送给温控模块;步骤三,气体控制模块接收气体数据,判断气体浓度或气体成分是否超过阈值,如果是则根据预设的第一气体过滤策略进行气体过滤,并将气体过滤中的气体数据发送给主控模块;步骤四,温控模块接收温湿度数据,计算接收的温湿度数据与目标温湿度的偏差,根据偏差通过pid算法生成第一温控策略,根据第一温控策略调节温湿度,并将调节过程中的温湿度数据发送给主控模块;步骤五,主控模块接收气体数据和温湿度数据,计算气体稳定性评价指标kpi1和温湿度稳定性指标kpi2;判断指标是否超过阈值,如果是,则调用svm模型生成的第二气体过滤策略,调用bp网络模型生成第二温控策略,并分别发送给气体控制模块和温控模块;步骤六,气体控制模块接收并根据第二气体过滤策略进行气体过滤;温控模块接收并根据第二温控策略调节温湿度;步骤七,主控模块判断气体稳定性评价指标kpi1和温湿度稳定性指标kpi2是否达到开盒条件,如果是则发送开盒指令给机械手模块;步骤八,机械手模块接收并执行开盒指令。
5、进一步地,第一气体过滤策略包含:第一级预过滤,当气体污染物粒径大于5μm时,设定气体以0.1m/s的速度经过滤芯筒外侧进入,利用5μm孔径的聚丙烯滤料进行从内向外的筛过滤,以去除气体中大于5μm的颗粒杂质;第二级高效过滤,当气体污染物粒径为0.3μm至5μm时,设定气体以0.05m/s的速度经过滤芯筒内侧进入,先通过0.3μm玻璃微纤维滤料层以去除0.3μm至5μm微细颗粒,再通过活性炭层吸附气体中的挥发性有机污染物;第三级活性炭吸附,对于挥发性有机污染物浓度高于10ppb时,利用气体通过两层活性炭过滤芯筒,活性炭采用椭圆形颗粒,利用1700m2/g的比表面积的活性炭吸附气体中的挥发性有机污染物;第四级气体净化,当气体中的残留污染物浓度高于100ppt时,将气体经感应电极激发生成的非热等离子体,利用等离子体中的氧离子氧化分解气体中的残留污染物;第五级负压吸附,经四级过滤后,当气体中的残留污染物浓度高于10ppt时,施加0.05mpa负压,利用负压增强活性炭的吸附能力,净化气体中的残留污染物。
6、进一步地,步骤一包括:设置多组气体传感器,采集气体数据,气体数据包含气体浓度和多种气体成分;将采集的气体数据,气体数据输入到预先建立的数据融合模块中,数据融合模块基于粒子滤波算法,输出融合后的气体数据;将融合后数据输入到数据校正模型中,数据校正模型利用预设的动态校准策略对气体数据进行校准,输出校准后的气体数据;将校准后气体数据输入到气体控制模型中,气体控制模型基于mrac算法建立,使用校准后的气体数据更新第一气体过滤策略的控制参数;将校准后的气体数据发送给气体控制模块。
7、进一步地,生成第二气体过滤策略和第二温控策略的步骤包括:获取气体传感器的空间坐标信息和采集的气体数据;根据获取的气体传感器的空间坐标信息和气体浓度,计算气体浓度在空间分布的统计均值和标准差,作为气体稳定性评价指标kpi1;建立开盒环境三维几何模型,采用fluent软件进行网格划分,进行温湿度场的cfd仿真;根据cfd仿真,提取温度场和湿度场的变化范围,计算变化幅度,作为温湿度稳定性指标kpi2;构建lasso回归模型,根据气体传感器的空间坐标信息,调整kpi1中各气体成分的权重;建立基于cfd仿真的气体扩散与温湿度耦合模型,采用bayes网络分别计算kpi1和kpi2的超限概率p1和p2;当超限概率p1或p2超过阈值时,主控模块调用svm模型,根据气体数据生成的第二气体过滤策略;主控模块调用bp网络模型,根据cfd温湿度数据生成第二温控策略;将第二气体过滤策略发送给气体控制模块,将第二温控策略发送给温控模块。
8、进一步地,步骤七包括:设置气体洁净度开盒阈值α和温湿度开盒阈值β;构建一双层lstm网络作为温湿度预测模型,lstm网络包含编码器和解码器;使用pt100和湿度传感器采集温湿度时间序列,将温湿度时间序列输入到编码器中,编码器根据lstm网络提取时间序列的特征,并输出第一特征表达向量;将cfd仿真的结果输入到编码器,生成第二特征表达向量;第二特征表达向量输入到解码器中,解码器根据lstm网络对温湿度状态进行预测,并输出第三特征表达向量;判断第三特征表达向量所表示的温湿度状态是否在允许温度范围20℃至25℃以及允许湿度范围40%rh至50%rh内;判断气体稳定性评价指标kpi1是否低于气体开盒阈值α;判断温湿度稳定性评价指标kpi2是否低于温湿度开盒阈值β;如果以上条件均满足,则判定开盒条件成立;主控模块向机械手下发profinet开盒执行指令。
9、进一步地,对采集的气体数据进行融合的步骤包括:将气体传感器采集的气体数据作为粒子滤波算法的观测量,气体传感器类型包含红外气体传感器和气体色谱仪;利用基于kullback leibler散度的采样方法初始化粒子状态,生成后验概率分布的第一粒子状态;对第一粒子状态,应用在线自适应调整过程噪声协方差矩阵的卡尔曼滤波算法,进行状态预测,输出预测状态;计算第一粒子状态的权重时,引入基于cfd气体传播模型的空间约束关系,并结合使用预训练的卷积神经网络提取的气体数据的深度特征,作为权重计算的先验知识;根据深度特征,通过auxiliary particle filter算法对粒子进行重采样,生成第二粒子状态;对采样获得的第二粒子状态,利用卡尔曼滤波算法修正,输出修正后的第二粒子状态;将修正后的第二粒子状态进行加权平均,得到气体浓度融合值;计算气体浓度融合值与采集的气体数据的误差,根据误差采用高斯牛顿法自适应调整上述卡尔曼滤波算法的过程噪声参数;递归执行上述步骤,输出融合后的气体浓度和气体成分。
10、进一步地,对融合后的气体数据进行校准的步骤包括:获取气体传感器采集的气体数据,并通过时序分析算法获得气体传感器的信号漂移模式;根据获取的信号漂移模式,采用递增微分算法计算气体传感器的零点校准参数和灵敏度校准参数;根据采集的气体数据、零点校准参数和灵敏度校准参数,计算气体数据的补偿控制量;利用获得的补偿控制量,对采集的气体数据进行闭环pid控制,生成经校准后的气体数据。
11、进一步地,利用校准后的气体数据更新第一气体过滤策略的步骤包括:构建基于mrac算法的气体控制模型,气体控制模型包含预设的第一气体过滤策略f1;将校准后的气体数据输入气体控制模型,基于rls算法,生成过滤策略f1';计算第一气体过滤策略f1与过滤策略f1'的误差;基于自适应控制算法,根据误差计算气体过滤的控制输入量δu;根据控制输入量δu对第一气体过滤策略进行调整;递归执行mrac算法,更新第一气体过滤策略。
12、进一步地,步骤三包括:气体控制模块内设置气体阈值数据库,数据库中预设多种气体成分的阈值;气体控制模块接收气体监测模块输出的气体数据;根据数据库中的气体成分的阈值,利用模糊控制算法判断气体数据是否超过阈值,如果是,则根据预设的第一气体过滤策略进行气体过滤;采用mems压力传感器监测气体压力,将监测的气体压力输入到气体流量智能调节装置;气体流量智能调节装置,采用自适应pid算法控制电子射频阀门,以调节气体流量。
13、进一步地,步骤四包括:获取采集的气体的温湿度数据;根据增量式pid算法,计算采集温湿度数据与目标温湿度的偏差e(t);根据偏差e(t),利用pid算法生成温控输出量u(t);将u(t)通过dac转换为0v至10v电压信号,作为三通换热阀的控制信号;三通换热阀精确调节气体流过电加热器和peltier制冷器的比例,控制气体温湿度;采用电子计数器获取温控过程中的温度调节次数和湿度调节次数。
14、3.有益效果
15、相比于现有技术,本技术的优点在于:
16、(1)使用pid算法和三通换热器,本方案能够实现对开盒环境温湿度的快速、精确控制,这是至关重要的,因为晶圆制造对环境温湿度的高度稳定性要求极高,通过防止温湿度波动对晶圆性能的不良影响,提高了晶圆的制造良率;
17、(2)引入机器学习模型生成温控策略和气体过滤策略,使系统具备智能化和自适应性。相较于传统的静态预定策略,这种智能决策系统可以根据实际情况进行学习和优化,从而更好地适应复杂和变化的开盒环境条件,这提高了系统的性能和效率,有助于提高晶圆的制造良率;
18、(3)设置了气体洁净度和温湿度的联动判断机制,只有在两个关键指标均满足条件时才执行开盒操作,这一机制确保了开盒环境的完善性,避免了在不适宜的环境条件下执行开盒操作对晶圆制造的不良影响,提高晶圆的制造良率。
- 还没有人留言评论。精彩留言会获得点赞!