一种无人机挂拆接地线的方法与流程
本发明涉及接地线拆装,具体地说,涉及一种无人机挂拆接地线的方法。
背景技术:
1、目前在配电网停电施工作业工作中,接地线的装拆主要靠人力攀爬杆塔来进行装拆,整个装拆过程既费时又费力,且作业人员在攀爬杆塔的过程中,存在很大的高坠、触电风险。为了降低作业人员的高坠风险,目前部分采用加长型操作杆装设接地线,作业人员可在地面完成接地线的装拆,但加长型的操作杆附赘接地线后太重,使得整个操作需要多人才能完成,在托举接地线过程中费力且不安全,同时受地形影响,加长型操作杆装设接地线的实用场景受限,多数地方并不适用。
技术实现思路
1、本发明的目的在于提供一种无人机挂拆接地线的方法,以解决上述背景技术中提出的目前部分采用加长型操作杆装设接地线,作业人员可在地面完成接地线的装拆,但加长型的操作杆附赘接地线后太重,使得整个操作需要多人才能完成,在托举接地线过程中费力且不安全,同时受地形影响,加长型操作杆装设接地线的实用场景受限,多数地方并不适用的问题。
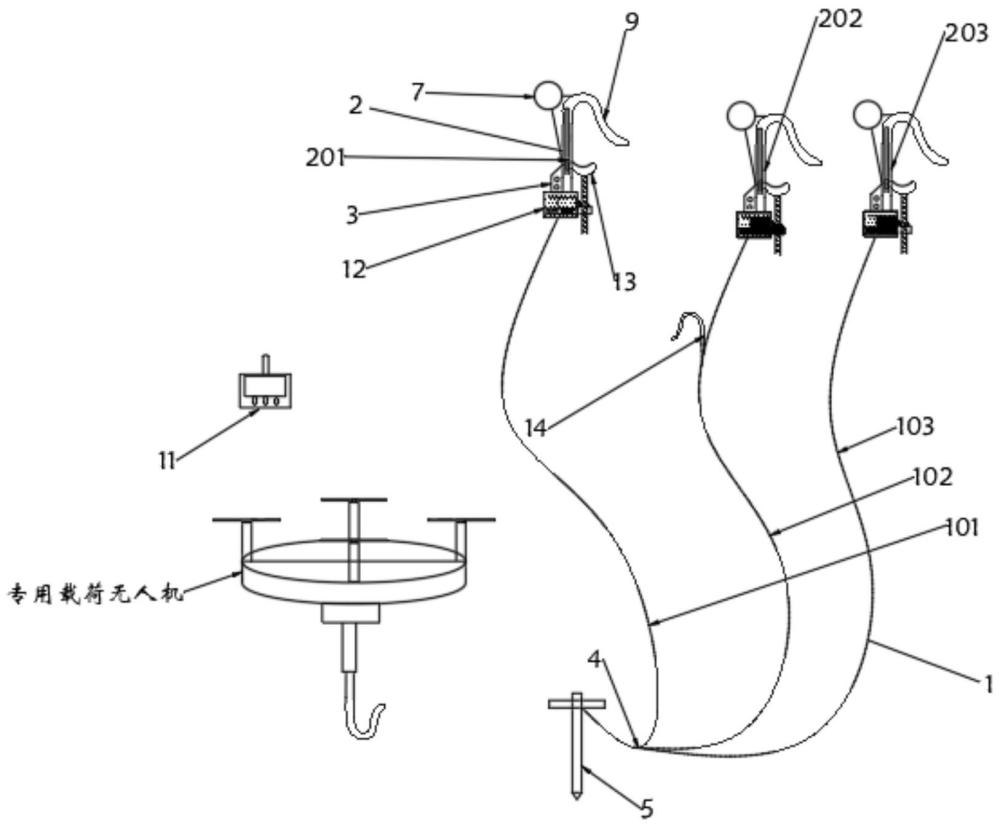
2、为实现上述目的,本发明提供了一种无人机挂拆接地线的方法,包括载荷无人机、遥控电动接地线夹、接地线,载荷无人机的底部安装有无人机吊钩,所述遥控电动接地线夹包括接地端子、线夹挂环、线夹挂钩、滑动压线头和电动传动装置,接地线的中间相在连接遥控电动接地线夹的下方固定有接地线挂钩,所述接地线的最尾端设置多相合一短接点,所述多相合一短接点的末端与接地针进行连接,所述接地线与接地端子压接配合,所述无人机吊钩与线夹挂环连接,将接地线吊起后通过线夹挂钩挂在架空导线上。
3、作为本发明的优选方案,所述接地线包括三个,分别为a相接地线、b相接地线和c相接地线,所述控电动接地线夹包括三个,分别为a相遥控电动接地线夹、b相遥控电动接地线夹和c相遥控电动接地线夹,所述架空导线包括三个,分别为a相架空导线、b相架空导线和c相架空导线。
4、作为本发明的优选方案,所述遥控电动接地线夹通过控制器进行遥控操作。
5、作为本发明的优选方案,载荷无人机的底部安装有平衡装置,所述平衡装置的底部安装有绝缘子,所述绝缘子的底端与无人机吊钩的顶端连接。
6、作为本发明的优选方案,所述电动传动装置包括外壳,所述外壳的内部安装有电机,所述外壳的内部还安装有电池,所述外壳的内部还安装有无线传输控制模块,所述电机的输出端安装有第一锥齿轮,所述外壳的外侧竖向设置有螺纹杆,所述螺纹杆的中部外侧螺纹连接有螺纹圈,所述螺纹圈的外壁安装有第二锥齿轮,所述第二锥齿轮与第一锥齿轮啮合,所述螺纹杆的顶端与滑动压线头连接。
7、作为本发明的优选方案,所述外壳的外壁安装有导向套,所述螺纹杆穿过导向套,所述导向套的内壁安装有导向块,所述螺纹杆的侧壁设置有导向槽,导向块与导向槽滑动连接。
8、作为本发明的优选方案,包括如下步骤:
9、s1、将a相接地线压接到a相遥控电动接地线夹的接地端子上;
10、s2、将接地线的尾端通过多相合一短接点短接后压接在接地针上并将接地针锤入大地;
11、s3、将遥控电动接地线夹放置好,载荷无人机起飞后通过控制无人机吊钩挂住a相遥控电动接地线夹上的线夹挂环;
12、s4、控制载荷无人机吊起a相接地线,并操控调整平衡装置使线夹挂钩平稳有效的挂到待接地的a相架空导线上;
13、s5、通过控制器遥控电动传动装置来推动滑动压线头实现线夹压紧导线,确保接地可靠性;
14、s6、控制载荷无人机将无人机吊钩脱离线夹挂环完成a相接地操作,拆除顺序与上述相反;
15、s7、操控载荷无人机开展b相接地线的装设;
16、s8、操控载荷无人机开展c相接地线的装设;
17、作为本发明的优选方案,所述s7中,在所述b相遥控电动接地线夹的下方固定接地线挂钩,所述b相接地线,控制无人机吊起b相接地线,将接地线挂钩先挂到a相架空导线上,从而将下坠力转移到b相接地线上,之后便可控制无人机完成b相遥控电动接地线夹挂到待接地的b相架空导线上,拆除顺序与上述相反;
18、作为本发明的优选方案,步骤s8中,操控载荷无人机开展c相接地线的装设步骤与a相接地线的装设步骤一致,通过控制无人机完成c相遥控电动接地线夹挂到待接地的c相架空导线上,拆除顺序与上述相反;
19、作为本发明的优选方案,整个装设过程中,操作人员不触及接地线。
20、与现有技术相比,本发明的有益效果:
21、1、该无人机挂拆接地线的方法中,通过遥控电动接地线夹进行接地线的装设,整个接地线的装设过程,操作人员不触及接地线,无需人员登杆,无需使用绝缘操作杆及相关绝缘防护用品,提高工作效率,减少停电作业时间,完全消除作业人员的高坠及触电风险,提升作业安全水平。
22、2、该无人机挂拆接地线的方法中,使用无人机代替人力装拆接地线,安全省时省力;接地线在接地末端设计了多相合一短路连接点,可根据接地对象线路是两线、三线、四线来灵活短接所需接地线根数,以便在10kv线路、低压配网线路中均可通用,无需分开单独准备;在接地线连接遥控电动接地线夹的下方适当位置固定了接地线挂钩,将无人机承受接地线的重量转移到导线上,之后便可控制无人机轻松完中间相导线的接地操作。
23、3、该无人机挂拆接地线的方法中,通过电动传动装置实现将线夹挂钩与架空导线进行压紧固定,保证在接地线的装设后不会松动,实现很好的接地效果。
技术特征:
1.一种无人机挂拆接地线的方法,包括载荷无人机、遥控电动接地线夹(2)、接地线(1),其特征在于:载荷无人机的底部安装有无人机吊钩(6),所述遥控电动接地线夹(2)包括接地端子(3)、线夹挂环(7)、线夹挂钩(9)、滑动压线头(13)和电动传动装置(12),接地线(1)的中间相在连接遥控电动接地线夹(2)的下方固定有接地线挂钩(14),所述接地线(1)的最尾端设置多相合一短接点(4),所述多相合一短接点(4)的末端与接地针(5)进行连接,所述接地线(1)与接地端子(3)压接配合,所述无人机吊钩(6)与线夹挂环(7)连接,将接地线(1)吊起后通过线夹挂钩(9)挂在架空导线(10)上。
2.根据权利要求1所述的无人机挂拆接地线的方法,其特征在于:所述接地线(1)包括三个,分别为a相接地线(101)、b相接地线(102)和c相接地线(103),所述控电动接地线夹(2)包括三个,分别为a相遥控电动接地线夹(201)、b相遥控电动接地线夹(202)和c相遥控电动接地线夹(203),所述架空导线(10)包括三个,分别为a相架空导线(1001)、b相架空导线(1002)和c相架空导线(1003)。
3.根据权利要求2所述的无人机挂拆接地线的方法,其特征在于:所述遥控电动接地线夹(2)通过控制器(11)进行遥控操作。
4.根据权利要求1所述的无人机挂拆接地线的方法,其特征在于:载荷无人机的底部安装有平衡装置(8),所述平衡装置(8)的底部安装有绝缘子(15),所述绝缘子(15)的底端与无人机吊钩(6)的顶端连接。
5.根据权利要求1所述的无人机挂拆接地线的方法,其特征在于:所述电动传动装置(12)包括外壳(121),所述外壳(121)的内部安装有电机(122),所述外壳(121)的内部还安装有电池(127),所述外壳(121)的内部还安装有无线传输控制模块(128),所述电机(122)的输出端安装有第一锥齿轮(123),所述外壳(121)的外侧竖向设置有螺纹杆(124),所述螺纹杆(124)的中部外侧螺纹连接有螺纹圈(125),所述螺纹圈(125)的外壁安装有第二锥齿轮(1251),所述第二锥齿轮(1251)与第一锥齿轮(123)啮合,所述螺纹杆(124)的顶端与滑动压线头(13)连接。
6.根据权利要求5所述的无人机挂拆接地线的方法,其特征在于:所述外壳(121)的外壁安装有导向套(126),所述螺纹杆(124)穿过导向套(126),所述导向套(126)的内壁安装有导向块,所述螺纹杆(124)的侧壁设置有导向槽,导向块与导向槽滑动连接。
7.根据权利要求3所述的无人机挂拆接地线的方法,其特征在于:包括如下步骤:
8.根据权利要求7所述的无人机挂拆接地线的方法,其特征在于:所述s7中,在所述b相遥控电动接地线夹(202)的下方固定接地线挂钩(14),所述b相接地线(102),控制无人机吊起b相接地线(102),将接地线挂钩(14)先挂到a相架空导线(1001)上,从而将下坠力转移到b相接地线(102)上,之后便可控制无人机完成b相遥控电动接地线夹(202)挂到待接地的b相架空导线(1002)上,拆除顺序与上述相反。
9.根据权利要求8所述的无人机挂拆接地线的方法,其特征在于:步骤s8中,操控载荷无人机开展c相接地线(103)的装设步骤与a相接地线(101)的装设步骤一致,通过控制无人机完成c相遥控电动接地线夹(203)挂到待接地的c相架空导线(1003)上,拆除顺序与上述相反。
10.根据权利要求9所述的无人机挂拆接地线的方法,其特征在于:整个装设过程中,操作人员不触及接地线(1)。
技术总结
本发明涉及接地线拆装技术领域,具体为一种无人机挂拆接地线的方法,包括载荷无人机、遥控电动接地线夹、接地线,载荷无人机的底部安装有无人机吊钩,遥控电动接地线夹包括接地端子、线夹挂环、线夹挂钩、滑动压线头和电动传动装置,接地线的中间相在连接遥控电动接地线夹的下方固定有接地线挂钩,接地线的最尾端设置多相合一短接点,多相合一短接点的末端与接地针进行连接。该无人机挂拆接地线的方法中,使用无人机代替人力装拆接地线,安全省时省力;接地线在接地末端设计了多相合一短路连接点,可根据接地对象线路是两线、三线、四线来灵活短接所需接地线根数,以便在10kV线路、低压配网线路中均可通用,无需分开单独准备。
技术研发人员:蒋文东,周永胜,虞鸿江,张耀品,解超,张平荣,徐金祥,尹树林,邹青林,宦建明,潘俊宇,王继恩,张朝军,郑明,杨兵,张海瑞,陈则宇,普绍明,李金保,李军龙,邢运泽,刘铭凤,刘琼
受保护的技术使用者:云南电网有限责任公司楚雄供电局
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!