一种电池存储机构及智能机器人的制作方法
本发明涉及电池盒,具体为一种电池存储机构及智能机器人。
背景技术:
1、智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”。在脑中起作用的是中央处理器,这种计算机跟操作它的人有直接的联系。最主要的是,这样的计算机可以进行按目的安排的动作。正因为这样,我们才说这种机器人才是真正的机器人,尽管它们的外表可能有所不同。
2、现有技术中,图书馆或者其他公共场所,在大厅中摆放智能机器人,为人们提供便捷的引导工作,智能机器人依靠电池存储盒实现电源供给,为了便于智能机器人持续工作,电池存储盒设置为可更换结构,及智能机器人装备的电池存储盒没电时,直接将其拆除后,更换新的电池存储盒,并对没电的电池存储盒充电。
3、但是,传统的电池存储盒安装时需要采用至少两组螺接结构固定,装卸不便,且拆除后的电池存储盒表面散热孔裸露,易向壳体内部进入灰尘,进入的灰尘不便于被清理出来。
技术实现思路
1、本发明的目的在于提供一种电池存储机构及智能机器人,以解决上述背景技术中提出的问题。
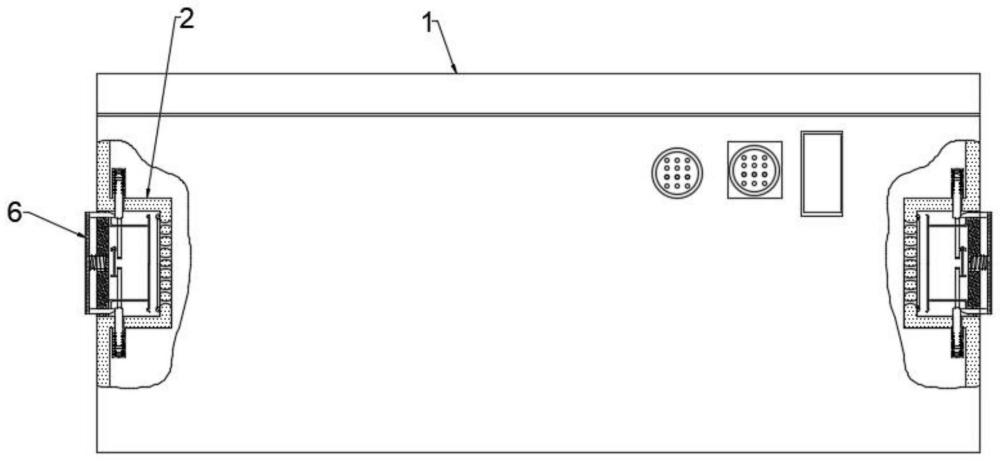
2、为实现上述目的,本发明提供如下技术方案:一种电池存储机构,包括电池存储盒,所述电池存储盒的侧板上一体成型有侧翼架,侧翼架的侧板表面开设有散热孔;
3、翼板,设于侧翼架的顶板和侧翼架的底板之间,翼板的表面活动插接有平移板,平移板的一端设置有夹持板,平移板的另一端通过牵引柄连接有扣板;及
4、推板,插接在侧翼架的顶板上。
5、优选的,所述侧翼架呈“匚”字形板状结构,侧翼架设置有两组,两组侧翼架关于电池存储盒对称分布,且翼板呈方形板状结构。
6、优选的,所述平移板呈方形板状,平移板的表面设置有斜面,平移板的斜面朝向推板,平移板设置有两组,两组平移板关于翼板的高度中心对称分布,平移板活动插接在穿口中,穿口开设在翼板的表面。
7、优选的,所述夹持板呈方形板状结构,夹持板远离翼板的一侧设置有橡胶垫,夹持板的表面居中设置有弹簧,弹簧的一端骨固定在收纳槽中,收纳槽开设在翼板的表面。
8、优选的,所述扣板呈方形板,扣板的两端一体成型有圆弧形弯板,扣板与橡胶圈对应,橡胶圈固定在侧翼架的侧板上,且散热孔处于橡胶圈的内环口中。
9、优选的,所述牵引柄呈“l”形板状结构,牵引柄设置有两组,两组牵引柄分别连接在两组平移板的表面,牵引柄穿过张拉框,张拉框呈“匚”字形板状结构,张拉框连接在推板的一端。
10、优选的,所述推板呈方形板状结构,推板朝向平移板的一端设置有圆弧形曲面,推板穿过侧翼架的板体后活动插接在限位套中,限位套连接在侧翼架的表面,限位套的内壁设置有多个橡胶卡环,橡胶卡环和卡槽匹配,卡槽开设在推板的表面,卡槽呈环形槽。
11、优选的,所述推板和平移板一一对应,两组张拉框的表面分别设置有连接片一和连接片二,连接片一的表面开设有卡位孔。
12、优选的,所述连接片二的表面设置有定位插杆,定位插杆的顶端套设有橡胶卡头,橡胶卡头穿过卡位孔后卡于卡位孔的一侧,橡胶卡头的直径大于卡位孔的孔径。
13、一种智能机器人,包括所述的电池存储机构。
14、与现有技术相比,本发明的有益效果是:
15、本发明提出的电池存储机构安装时,同时张拉两组推板挤推对应的平移板带动夹持板抵持在电池存储盒的安装槽口中,推板阻挡平移板回移,如此两侧的夹持板抵持在电池存储盒的安装槽口中,实现电池存储盒的免打孔安装,较少旋拧螺接结构的工作;当电池存储盒拆卸时,将推板回拨,平移板回移,且平移板铜鼓牵引柄挤推扣板覆盖散热孔,避免灰尘通过散热孔进入壳体中。
技术特征:
1.一种电池存储机构,包括电池存储盒(1),其特征在于:所述电池存储盒(1)的侧板上一体成型有侧翼架(2),侧翼架(2)的侧板表面开设有散热孔(3);
2.根据权利要求1所述的一种电池存储机构,其特征在于:所述侧翼架(2)呈“匚”字形板状结构,侧翼架(2)设置有两组,两组侧翼架(2)关于电池存储盒(1)对称分布,且翼板(4)呈方形板状结构。
3.根据权利要求2所述的一种电池存储机构,其特征在于:所述平移板(5)呈方形板状,平移板(5)的表面设置有斜面,平移板(5)的斜面朝向推板(14),平移板(5)设置有两组,两组平移板(5)关于翼板(4)的高度中心对称分布,平移板(5)活动插接在穿口(13)中,穿口(13)开设在翼板(4)的表面。
4.根据权利要求3所述的一种电池存储机构,其特征在于:所述夹持板(6)呈方形板状结构,夹持板(6)远离翼板(4)的一侧设置有橡胶垫(7),夹持板(6)的表面居中设置有弹簧(8),弹簧(8)的一端骨固定在收纳槽(9)中,收纳槽(9)开设在翼板(4)的表面。
5.根据权利要求4所述的一种电池存储机构,其特征在于:所述扣板(11)呈方形板,扣板(11)的两端一体成型有圆弧形弯板,扣板(11)与橡胶圈(12)对应,橡胶圈(12)固定在侧翼架(2)的侧板上,且散热孔(3)处于橡胶圈(12)的内环口中。
6.根据权利要求5所述的一种电池存储机构,其特征在于:所述牵引柄(10)呈“l”形板状结构,牵引柄(10)设置有两组,两组牵引柄(10)分别连接在两组平移板(5)的表面,牵引柄(10)穿过张拉框(18),张拉框(18)呈“匚”字形板状结构,张拉框(18)连接在推板(14)的一端。
7.根据权利要求6所述的一种电池存储机构,其特征在于:所述推板(14)呈方形板状结构,推板(14)朝向平移板(5)的一端设置有圆弧形曲面,推板(14)穿过侧翼架(2)的板体后活动插接在限位套(15)中,限位套(15)连接在侧翼架(2)的表面,限位套(15)的内壁设置有多个橡胶卡环(17),橡胶卡环(17)和卡槽(16)匹配,卡槽(16)开设在推板(14)的表面,卡槽(16)呈环形槽。
8.根据权利要求7所述的一种电池存储机构,其特征在于:所述推板(14)和平移板(5)一一对应,两组张拉框(18)的表面分别设置有连接片一(19)和连接片二(20),连接片一(19)的表面开设有卡位孔(23)。
9.根据权利要求8所述的一种电池存储机构,其特征在于:所述连接片二(20)的表面设置有定位插杆(21),定位插杆(21)的顶端套设有橡胶卡头(22),橡胶卡头(22)穿过卡位孔(23)后卡于卡位孔(23)的一侧,橡胶卡头(22)的直径大于卡位孔(23)的孔径。
10.一种智能机器人,其特征在于:包括如上述权利要求1-9任意一项所述的电池存储机构。
技术总结
本发明涉及电池盒技术领域,具体为一种电池存储机构及智能机器人,包括电池存储盒,所述电池存储盒的侧板上一体成型有侧翼架,侧翼架的侧板表面开设有散热孔;翼板设于侧翼架的顶板和侧翼架的底板之间;有益效果为:本发明提出的电池存储机构安装时,同时张拉两组推板挤推对应的平移板带动夹持板抵持在电池存储盒的安装槽口中,推板阻挡平移板回移,如此两侧的夹持板抵持在电池存储盒的安装槽口中,实现电池存储盒的免打孔安装,较少旋拧螺接结构的工作;当电池存储盒拆卸时,将推板回拨,平移板回移,且平移板铜鼓牵引柄挤推扣板覆盖散热孔,避免灰尘通过散热孔进入壳体中。
技术研发人员:吴学超
受保护的技术使用者:中逸宏芯(浙江)智控科技有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!