一种擒纵装置、机械臂及晶圆加工设备的制作方法
本技术属于晶圆(wafer)加工,尤其涉及一种擒纵装置、机械臂及晶圆加工设备。
背景技术:
1、随着半导体工艺的演进,晶圆的直径越来越大、厚度越来越小;其中,相应地出现了若干用于处理超大、超薄晶圆的工艺技术;以太古(taiko)工艺为例,在其实施的各个阶段,都需要对工件进行转移,以适应工艺对工件姿态的要求;特别是在减薄、切片等工序,转移工具对工件的支撑显得尤为重要。
2、如上所述,晶圆转移过程通常会涉及姿态的翻转腾挪,尤其是在倒置作业过程中,对晶圆擒纵操作的稳定性提出了更高的要求;如图2、图3所示相关技术中的机械臂,在运行中常会在图1所示背板框架(199)与白膜(299)掉真空风险区域(188)出现真空吸盘(499)掉真空的现象;严重时,如多个吸盘失效或吸盘吸附力不足,还会出现掉片事故,严重影响生产效率并拉高综合成本。
技术实现思路
1、本实用新型公开了一种擒纵装置,包括第一框架本体、第二膜部件、第三臂部件;其第二膜部件贴合或吸附于其第一框架本体第一面;第一框架本体通过第四吸盘阵列吸附于第三机械臂。
2、其中,第四吸盘阵列固定或可拆卸安装于第三机械臂;其第四吸盘阵列可包括至少3组第四吸盘组件;该第二膜部件第二外接圆与第四吸盘阵列各个吸附区域的交集为空集;其吸附区域为第四吸盘阵列中各吸盘与第一框架本体接触区域之和。
3、具体地,其第四吸盘组件可以设置有第一吸盘和第二吸盘,用以提升吸附的可靠性;其中,第一吸盘和第二吸盘的几何中心位于第一分布圆,以使得吸盘在径向所占的空间尽量减少,进而也有利于相关设备减少占用的空间;通常,其第一分布圆可以设置成与第二外接圆同心。
4、进一步地,其第三臂部件可以设置有对称布置的第三臂一部件和第三臂二部件;第三臂一部件和第三臂二部件上可设置有相同数量的第四吸盘阵列;这样可以使得吸附力得到均布处理,也有利于提升擒纵动作的可靠性。
5、具体地,其第四吸盘阵列可以设置4只第四吸盘组件;并使得其第三臂一部件和第三臂二部件各包括2只第四吸盘组件。
6、此外,其第四吸盘阵列可以通过与动力部件的交叉控制气路连通来获取动力;由于交叉控制气路存在互锁结构,不同的气路均可以获得来自不同动力源的动力,这将使得擒纵过程的可靠性再进一步得到增强。
7、具体地,可将其第四吸盘组件中每个吸盘的吸力设置为大于900g力的状态;此时,即可适应最不利工况或最大工件负载下可靠擒纵动作的需要。
8、其中,为了与晶圆适配,其第一框架本体的工件承载区可以设置为圆形;其第二膜部件也可以设置为圆形;考虑到圆形吸盘的优点,其第四吸盘组件中每一个吸盘与第一框架本体接触部分的投影通常也为圆形。
9、实际应用中,可在其第二膜部件上吸附或可拆卸放置有晶圆;其中,如晶圆的直径为25.4*12毫米,则其第三臂部件远离其驱动部件一端距离第三臂部件旋转轴的长度应不小于505毫米;此时,即可确保对于最大的工件,上述结构同样地适用。
10、相应地,本实用新型实施例还公开了一种机械臂,包括上述任一项给出的擒纵装置;其中,其第三臂部件可固定于转轴、执行器和/或驱动装置上;其执行器和/或驱动装置可通过带动第三臂部件,使得工件按照预设的轨迹平动、转动或进行复合运动。
11、此外,对应使用了上述结构或产品的晶圆加工设备,同样包括如上任一项的擒纵装置和/或机械臂;因而,该设备同样获得晶圆擒纵过程中可靠的吸附能力,其实现过程不再赘述。
12、综上,通过改进晶圆擒纵装置的形状和构造,将臂部件核心吸盘的位置调整到不干涉第二膜部件的区域,避免了第二膜部件边缘台阶与吸盘接触区域存在的掉真空风险问题。
13、其中,第四吸盘阵列可以通过设置双吸盘结构来进一步提升可靠性;由于双吸盘呈环状分布,这使得在增加吸附面积的同时,也不需要增加第一框架本体的空间。
14、此外,还可采用交叉控制气路来提升设备可靠性,使得掉片率进一步降低;相应地,可在机械臂和/或晶圆加工设备中引入上述技术方案,使得晶圆的转运效率和加工能力得到有效的提升。
15、需要说明的是,在本文中采用的“第一”、“第二”等类似的语汇,仅仅是为了描述技术方案中的各组成要素,并不构成对技术方案的限定,也不能理解为对相应要素重要性的指示或暗示;带有“第一”、“第二”等类似语汇的要素,表示在对应技术方案中,该要素至少包含一个。
技术特征:
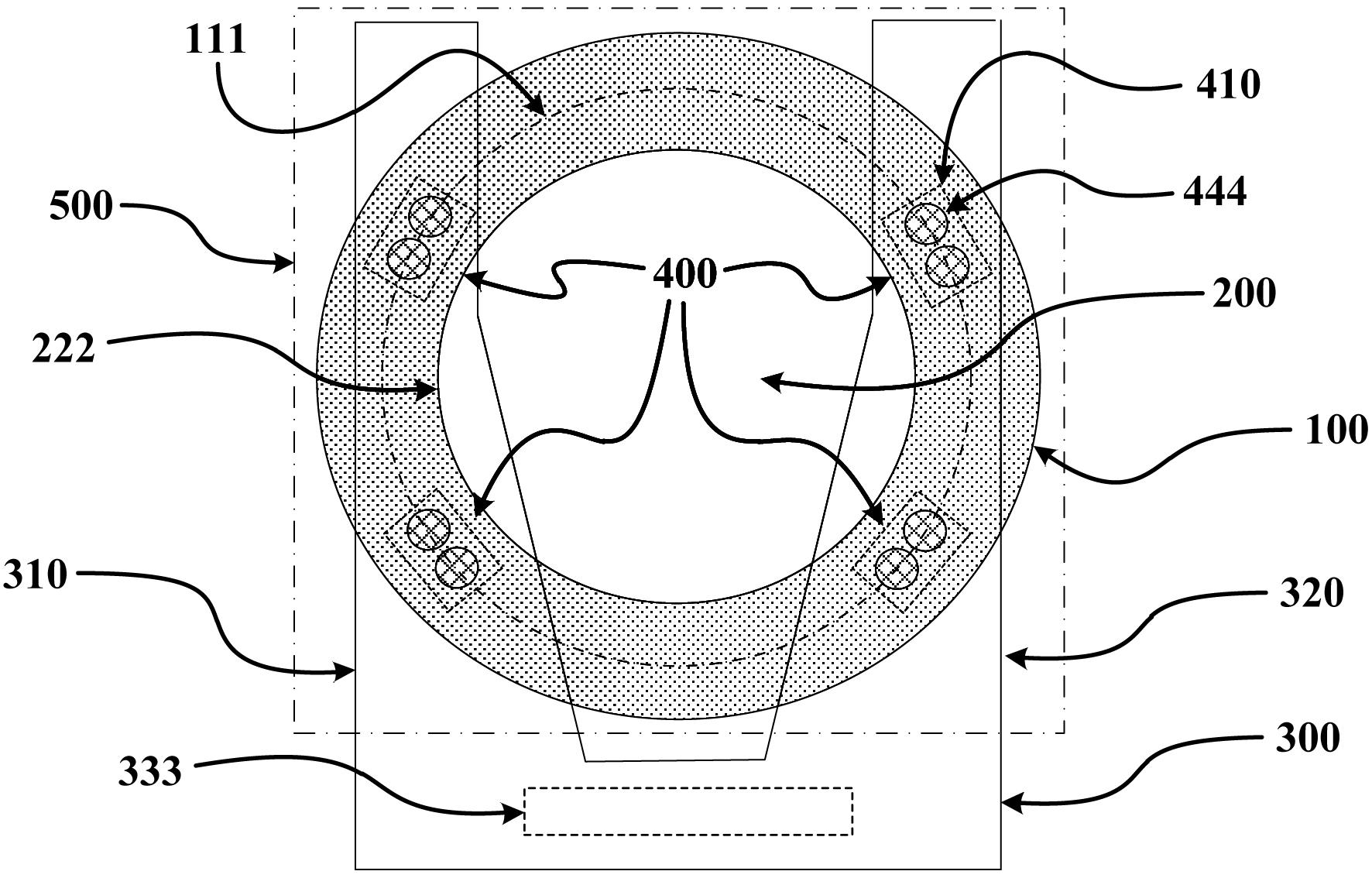
1.一种擒纵装置(500),包括第一框架本体(100)、第二膜部件(200)、第三臂部件(300);其中,所述第二膜部件(200)贴合或吸附于所述第一框架本体(100)第一面;所述第一框架本体(100)通过第四吸盘阵列(400)吸附于所述第三臂部件(300);所述第四吸盘阵列(400)固定或可拆卸安装于所述第三臂部件(300);所述第四吸盘阵列(400)包括至少3组第四吸盘组件(410);所述第二膜部件(200)第二外接圆(222)与所述第四吸盘阵列(400)各个吸附区域(444)的交集为空集;所述吸附区域(444)为所述第四吸盘阵列(400)中各吸盘与所述第一框架本体(100)接触区域之和。
2.如权利要求1所述的擒纵装置(500),其中:所述第四吸盘组件(410)包括第一吸盘(411)和第二吸盘(412);所述第一吸盘(411)和所述第二吸盘(412)的几何中心位于第一分布圆(111)上;所述第一分布圆(111)与所述第二外接圆(222)同心。
3.如权利要求1或2所述的擒纵装置(500),其中:所述第三臂部件(300)包括轴对称布置的第三臂一部件(310)和第三臂二部件(320);所述第三臂一部件(310)和所述第三臂二部件(320)上包括相同数量的所述第四吸盘阵列(400)。
4.如权利要求3所述的擒纵装置(500),其中:所述第四吸盘阵列(400)包括4只所述第四吸盘组件(410);所述第三臂一部件(310)和所述第三臂二部件(320)各包括2只所述第四吸盘组件(410)。
5.如权利要求1、2或4任一项所述的擒纵装置(500),其中:所述第四吸盘阵列(400)与动力部件通过交叉控制气路(333)连通。
6.如权利要求5所述的擒纵装置(500),其中:所述第四吸盘组件(410)中每个吸盘的吸力大于900g力。
7.如权利要求1、2、4或6任一项所述的擒纵装置(500),其中:所述第一框架本体(100)的工件承载区为圆形;所述第二膜部件(200)也为圆形;所述第四吸盘组件(410)每一个吸盘与所述第一框架本体(100)接触部分的投影为圆形。
8.如权利要求7所述的擒纵装置(500),其中:如所述第二膜部件(200)上吸附或可拆卸放置有晶圆(800),如所述晶圆(800)的直径为25.4*12毫米,则所述第三臂部件(300)远离其驱动部件一端距离所述第三臂部件(300)旋转轴的长度不小于505毫米。
9.一种机械臂(600),包括如权利要求1、2、4、6或8任一项所述的擒纵装置(500);其中,所述第三臂部件(300)固定于转轴、执行器和/或驱动装置上;所述执行器和/或所述驱动装置带动所述第三臂部件(300)按照预设的轨迹平动、转动或进行复合运动。
10.一种晶圆加工设备(900),包括如权利要求1、2、4、6、8任一项所述的擒纵装置(500)和/或如权利要求9所述的机械臂(600)。
技术总结
本技术属于晶圆(Wafer)加工技术领域,尤其涉及一种擒纵装置(500)、机械臂(600)及晶圆加工设备(900);通过改进晶圆擒纵装置(500)的形状和构造,将臂部件核心吸盘的位置调整到不干涉第二膜部件(200)的区域,避免了第二膜部件(200)边缘台阶与吸盘接触区域存在的掉真空风险问题;其中,第四吸盘阵列(400)可以通过设置双吸盘结构来进一步提升可靠性;由于双吸盘呈环状分布,这使得在增加吸附面积的同时,也不需要增加第一框架本体(100)的空间;此外,还可采用交叉控制气路来提升设备可靠性,使得掉片率进一步降低;相应地,可在机械臂和/或晶圆加工设备(900)中引入上述技术方案,使得晶圆的转运效率和加工能力得到有效的提升。
技术研发人员:王斌,陈炜光,冯攀
受保护的技术使用者:华虹半导体(无锡)有限公司
技术研发日:20230428
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!