四足机器人电源的制作方法
本技术涉及一种电池,具体涉及一种四足机器人电源。
背景技术:
1、四足机器人具有优越的移动性能和环境适应能力,其可与各种功能模块进行有机融合,从而应用于各种产业。目前四足机器人普遍的续航时间在3-4小时,其电池容量直接影响了四足机器人的续航时间,由于锂电池有一个能量密度,即单位体积所能做到的容量,因此增大电池容量,势必增大电池体积,相应地四足机器人的体型就会增大。如何在不增大四足机器人体型的情况下,延长其续航时间,是本领域技术人员亟待解决的问题。
技术实现思路
1、本实用新型的目的在于克服上述背景技术的缺陷和不足,提供一种能够根据机器人的空间灵活配置的电池包的四足机器人电源。
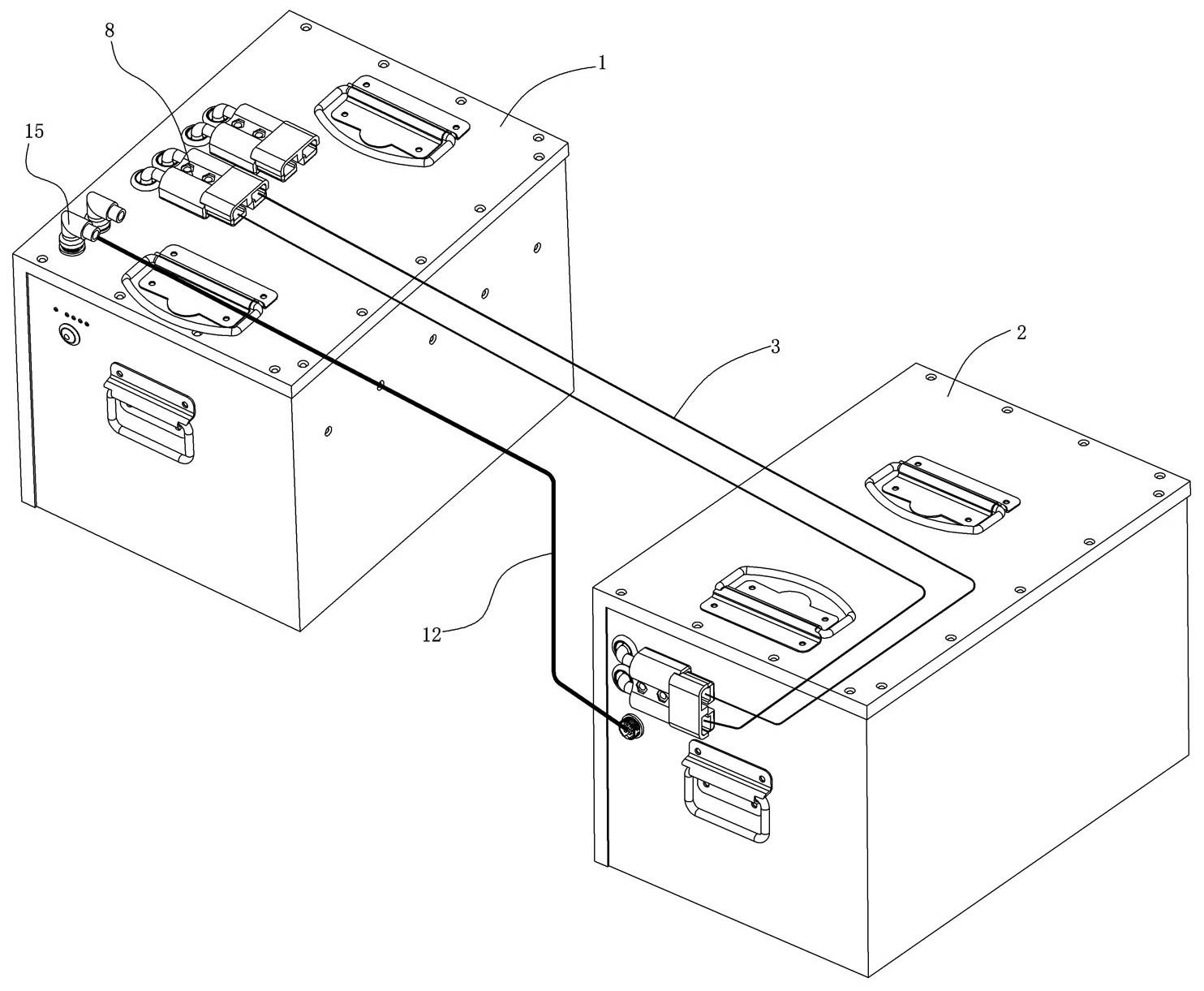
2、为实现上述目的,本实用新型提供一种四足机器人电源,包括两组的电池模组,两组所述电池模组之间通过连接线串联,其特征在于,两组所述电池模组均包括外壳以及设置在外壳内的电池包,其中,所述外壳包括壳体以及安装在所述壳体上的盖板,所述壳体为由底板以及与所述底板固定连接的左、右侧板和后侧板组成的前侧以及顶部开口的箱体结构,所述盖板为由前盖板和顶盖板固定连接形成的l形结构,其覆盖在所述壳体的开口上,以将该壳体拼装成内部具有安装所述电池包的密闭空间的结构;
3、在其中一组所述电池模组的顶盖板上设有中间连接口、充/放电口、机器人通讯口和采样口,在另一组所述电池模组的左侧板或右侧板上设置有中间连接口和采样口,两所述中间连接口上均连接有快速插座,两快速插座通过连接线连接,两所述采样口通过采样线连接;在两组所述电池模组的顶盖板以及左侧板和右侧板均设置有提手。上述将电源分为两个电池模组,放置在两个空间,可以更灵活地布置四足机器人的空间,以满足其体型的需要,并且在搬运电池时,两个电池包可以分别搬运,相比采用一个电池模组的电池,其重量轻,方便搬运。
4、进一步地,在两组所述电池模组的壳体内均设置呈固定架,所述固定架由水平布置的支撑板和竖向布置的固定板组成,两者连接构成l形结构,其中,在所述支撑板远离所述固定板的一端设置有向上的翻边构成的连接条,以能够方便地与所述壳体后侧板连接,在所述固定板远离该支撑板的一端设置有向外的翻边形成的连接条,以与所述壳体的底板连接,在两所述连接条上均开设有连接孔。通过设置固定架可以有效地固定电池包,防止电池包在搬运和机器人工作时发生移位,影响其正常工作。
5、进一步地,在两所述固定架上固定连接有多个呈门型的用于固定走线的扎线杆。通过设计扎线杆方便线束固定,也便于走线,同时也保证电池壳体内部的整洁性。
6、进一步地,两所述固定架与相应的电池包之间依次设置有环氧绝缘板和硅胶板。通过设计环氧绝缘板保证其安装形,设计硅胶板,通过硅胶板的变形能够有效地对电池包进行固定。
7、进一步地,在两所述固定架的支撑板上表面均设置有多个螺母柱,如此设计便于安装其他部件。
8、进一步地,在其中一个固定架的支撑板板上安装有保护板,另一个固定架上安装有保险板,在保险板的上方设置有绝缘板。
9、进一步地,在所述固定架上设置有朝向电池包的翻边构成加强筋条,如此设计能够提高固定架的强度。
10、进一步地,在所述壳体的侧板上均设置有向内的翻边,在翻边上设置有若干通孔。
11、进一步地,在所述盖板上对应所述连接孔之处设置有沉孔。
12、与现有技术相比,本实用新型具有以下技术效果:
13、1.本实用新型将四足机器人电源设为两个电池模组,不仅可以根据机器人的空间灵活布置,优化机器人的空间布置,以满足机器人提醒的需要,同时也起到了配重的作用,为机器人运动的平稳性提供基础保障;并且在搬运电池时,两个电池包可以分别搬运,相比采用一个电池模组的电池,其重量轻,方便搬运;
14、2.本实用新型设计合理,能够有效利用壳体的空间,结构紧凑,通过设置固定架,能够防止电池包在壳体内以为,以满足机器人不同作业工况的需要,安全性能高,延长其使用寿命;
15、3.本实用新型的固定架与电池包之间设置有绝缘板和硅胶板,不仅安全性高,通过硅胶板的变形还能将电池包夹紧,有效固定电池包,防止在搬运机器人和机器人作业时产生位移,损坏电池包,保证其使用寿命。
技术特征:
1.一种四足机器人电源,包括两组的电池模组,两组所述电池模组之间通过连接线串联,其特征在于,两组所述电池模组均包括外壳以及设置在外壳内的电池包,其中,所述外壳包括壳体以及安装在所述壳体上的盖板,所述壳体为由底板以及与所述底板固定连接的左、右侧板和后侧板组成的前侧以及顶部开口的箱体结构,所述盖板为由前盖板和顶盖板固定连接形成的l形结构,其覆盖在所述壳体的开口上,以将该壳体拼装成内部具有安装所述电池包的密闭空间的结构;
2.根据权利要求1所述的四足机器人电源,其特征在于,在两组所述电池模组的壳体内均设置呈固定架,所述固定架由水平布置的支撑板和竖向布置的固定板组成,两者连接构成l形结构,其中,在所述支撑板远离所述固定板的一端设置有向上的翻边构成的连接条,以能够方便地与所述壳体后侧板连接,在所述固定板远离该支撑板的一端设置有向外的翻边形成的连接条,以与所述壳体的底板连接,在两所述连接条上均开设有连接孔。
3.根据权利要求2所述的四足机器人电源,其特征在于,在两所述固定架上固定连接有多个呈门型的用于固定走线的扎线杆。
4.根据权利要求3所述的四足机器人电源,其特征在于,两所述固定架与相应的电池包之间依次设置有环氧绝缘板和硅胶板。
5.根据权利要求4所述的四足机器人电源,其特征在于,在两所述固定架的支撑板上表面均设置有多个螺母柱。
6.根据权利要求5所述的四足机器人电源,其特征在于,在其中一个固定架的支撑板板上安装有保护板,另一个固定架上安装有保险板,在保险板的上方设置有绝缘板。
7.根据权利要求1所述的四足机器人电源,其特征在于,在所述固定架上设置有朝向电池包的翻边构成加强筋条。
8.根据权利要求1所述的四足机器人电源,其特征在于,在所述壳体的侧板上均设置有向内的翻边,在翻边上设置有若干通孔。
9.根据权利要求8所述的四足机器人电源,其特征在于,在所述盖板上对应所述连接孔之处设置有沉孔。
技术总结
本技术涉及一种四足机器人电源,两组的电池模组,两组所述电池模组之间通过连接线串联,两组所述电池模组均包括外壳以及设置在外壳内的电池包,其中,所述外壳包括壳体为前侧以及顶部开口的箱体结构,所述盖板为由前盖板和顶盖板固定连接形成的L形结构,其覆盖在所述壳体的开口上,以将该壳体拼装成内部具有安装所述电池包的密闭空间的结构,本技术将电源分为两个电池模组,放置在两个空间,可以更灵活地布置四足机器人的空间,以满足其体型的需要,另外将电池模组设计为拼装结构,结构紧凑,能够有效利用电池壳体内部空间,保证电池模组容量的条件下,还能缩小体积。
技术研发人员:张爱武,黄永胜,董玉玺
受保护的技术使用者:郑州锐晶裕华新能源有限公司
技术研发日:20230602
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!