机器人的充电装置
本发明涉及足式机器人的自主充电,特别是涉及一种机器人的充电装置。
背景技术:
1、足式机器人是一种仿生机器人,它们使用类似于人或动物的足部的结构和运动机制来实现移动和交互。足式机器人已经在各种领域得到广泛应用,包括工业制造业、医疗保健、娱乐等。
2、足式机器人通过腿的运动实现机身的运动,其运动的部件较多,定位精度也较难控制,再加上足式机器人充电时,需要有一个下蹲的动作,该动作也会导致机身位置的偏移。实现足式机器人自动充电的一般都是通过提高机器人自身的传感器性能,保证机器人具有较高的定位精度,然后机器人下蹲,通过额外的装置完成充电接头的对接,但是在下蹲过程中随着高度的下降,受电接口也会随之发生摆动导致机身下落至最低点时受电口与充电接头之间存在误差导致无法对接,进而无法进行自动充电。
3、现有技术中,中国专利cn 209627015 u公开了一种腿足式机器人的自主充电装置,包括安装在腿足式机器人腹部的腹部充电座和固定在地面的地面充电座。腹部活动端子与底座活动端子采用面对点的接触,对误差的容忍度较大,能够在无高精度的定位系统的帮助下正常完成自主充电操作,降低了系统成本;不充电时,暴露在外的腹部活动端子和地面活动端子均与电路断开,保证了机器人电源系统的安全性。该专利的腿足式机器人的主充电装置,需要将腹部充电座安装在腿足机器人的腹部,这无疑使得腿足机器人的结构更加复杂,且制造成本增加,不利于腿足式机器人的自主充电装置的通用性。
技术实现思路
1、有鉴于此,本发明提供一种机器人的自主充电装置,在处理模块与两组位置检测单元的配合下,能够确保机器人充电过程的可靠性和安全性,避免机器人未到位或错位时充电模块错误放电产生安全隐患,且无需对机器人的结构进行改动,以免造成成本增加,有利于增加机器人的充电装置的通用性。
2、一种机器人的充电装置,包括支撑模块、分别连接于支撑模块的至少两组充电模块和处理模块,其中,充电模块包括壳体、绝缘件、用于与机器人的电极连接的充电部、用于检测机器人的电极是否接触充电部的位置检测单元和安装组件,安装组件设于壳体内,充电部和位置检测单元分别设于安装组件上,绝缘件设于壳体与充电部之间,支撑模块上设有处理模块,处理模块用于在位置检测单元检测到机器人的电极接触充电部时控制充电部与机器人的电极之间的电路连接。
3、根据本发明的机器人的充电装置,具体地,机器人移动至机器人的充电装置的上方,并缓慢趴下,机器人的机身上的第一电极、第二电极分别与两组充电模块上的充电部接触,同时,两组充电模块上的位置检测单元均检测到机器人的电极接触充电部时,处理模块根据位置检测单元传输的信号控制充电部与机器人的电极之间的电路连接,此时机器人开始正常充电,因此,根据本发明的机器人的充电装置,在处理模块与两组位置检测单元的配合下,能够确保机器人充电过程的可靠性和安全性,避免机器人未到位或错位时充电模块错误放电产生安全隐患,且无需对机器人的结构进行改动,以免造成成本增加,有利于增加机器人的充电装置的通用性。
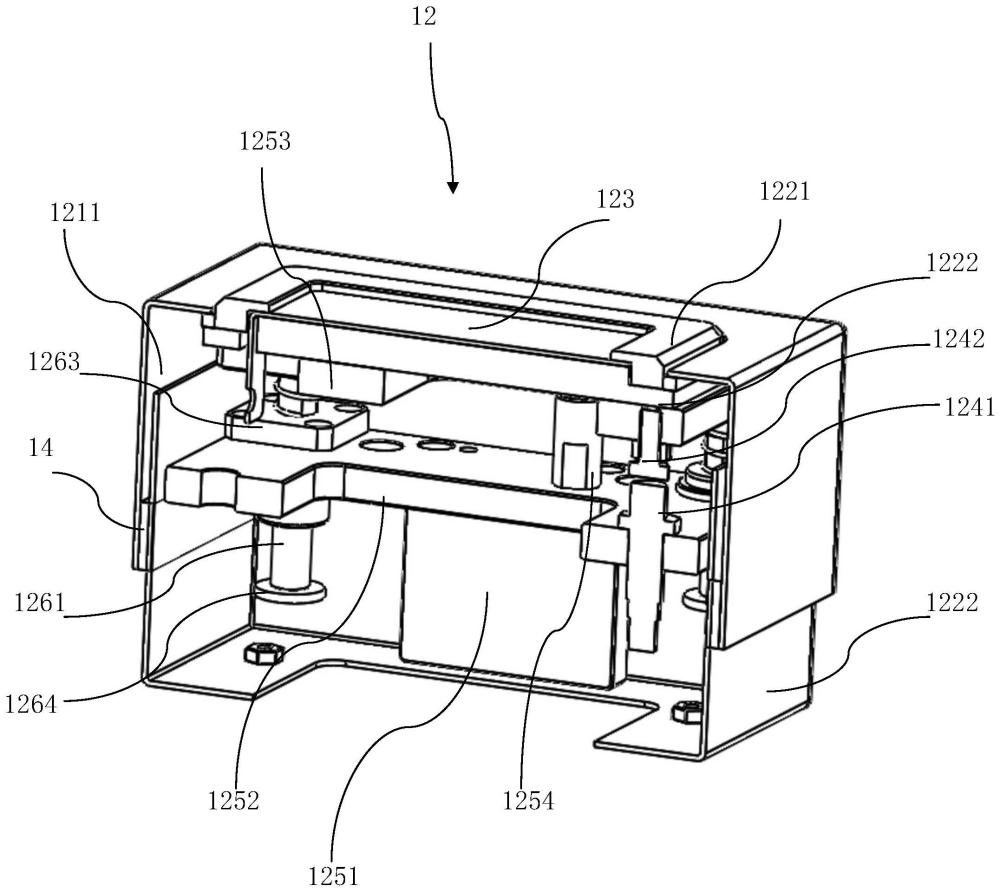
4、在一实施例中,壳体包括第一壳体和第二壳体,安装组件设于第二壳体内,第一壳体可移动地连接于第二壳体,安装组件包括连接部、第一安装部和第二安装部,连接部连接于第二壳体的底部,第一安装部连接于连接部,第二安装部平行于第一安装部且设于第二壳体内,绝缘件分别连接于充电部、第一壳体和第二安装部,第一安装部和第二安装部之间设有弹性支撑组件,以提供使第二安装部朝背离第一安装部的方向移动的弹性支撑力。
5、具体地,上述结构形式的充电模块,通过设置于第一安装部和第二安装部之间的弹性支撑组件,确保机器人的充电装置整体具有弹性阻尼,确保充电部与机器人电极接触的稳定性。
6、在一实施例中,弹性支撑组件包括导向件和弹性件,导向件的一端固定连接于第二安装部,弹性件套设于导向件,第一安装部的顶部设有定位件,导向件可滑动地穿设于定位件和第一安装部,导向件的另一端设有第一限位部,第二安装部的底部设有第二限位部。
7、具体地,充电模块具有两个位置状态,当充电模块的顶部无机器人施加重力时处于第一位置状态,第一壳体受弹性支撑组件的作用处于上限位,此时第一限位部和定位件接触,位置检测单元未检测到机器人处于充电模块上,充电部处于电路断开状态,当充电模块的顶部有机器人施加重力时,第一壳体下移至下限位,第二安装部接触第二限位部,位置检测单元检测到机器人处于充电模块上,充电部处于电路连接状态,此时充电模块处于第二位置状态。因此,上述结构形式的弹性支撑组件,能够极大程度上确保充电部与机器人的电极接触的稳定性。
8、在一实施例中,位置检测单元包括位置传感器和感应件,其中,位置传感器固定连接于第一安装部,感应件固定连接于第二安装部上与位置传感器对应的位置,处理模块用于在位置传感器检测到感应件时控制充电部与机器人的电极之间的电路连接。
9、上述结构形式的位置检测单元,结构简单紧凑,易于布置安装,操作控制简单便捷,且能够精准可靠地检测机器人是否处于充电模块上。
10、在一实施例中,第一壳体上设有用于与机器人的内部传感器电性连接的感应模块,处理模块还用于在感应模块接收到机器人的内部传感器的感应信号时控制充电部与机器人的电极之间的电路连接。
11、具体地,进一步通过在充电模块上设置感应模块与机器人内部的传感器对应检测机器人是否处于充电模块的合适位置上,可以极大程度上提高机器人充电过程的可靠性和安全性,避免机器人未到位或错位时充电模块错误放电产生安全隐患。
12、在一实施例中,第一壳体的内侧与第二壳体的外侧之间设有弹性密封件,第二壳体的底部设有用于与支撑模块固定连接的第一安装孔。
13、通过在第一壳体和第二壳体之间设置弹性密封件,且仅仅在充电模块的底部留设安装孔,以使整个充电装置的上部无开孔,充电模块的顶部及四周密闭,从而能够极大程度上提高整个充电装置的防水防尘性能。
14、在一实施例中,绝缘件包括第一绝缘件和第二绝缘件,第一绝缘件卡设在充电部的外侧与第一壳体之间,第二绝缘板设于充电部的底部且固定连接于第二安装部。
15、绝缘件的上述布置形式,能够极大程度上确保整个充电装置的绝缘性能,且能够加大程度上确保整个充电模块的防水防尘性能。
16、在一实施例中,支撑模块包括支撑底座壳体,处理模块设于支撑底座壳体内,支撑底座壳体的顶部设有用于安装充电模块的第二安装孔和过线口,支撑底座壳体的侧部分别设有散热组件、安装和检修口,支撑底座壳体的底部设有第三安装孔和出线口。
17、上述结构形式的支撑模块,能够很好地对整个充电装置进行散热,避免充电过程中发生起火等安全事故,通过设置第二安装孔、第三安装孔,过线口和出线口等,有利于提高整个充电装置的机械安装和电气连接安装的便捷性,而安装和检修口的设置,有利于整个充电装置的安装和维护。
18、在一实施例中,支撑底座壳体的一侧可拆卸地设有底座侧盖。
19、通过在支撑底座壳体的一侧设置可拆卸的底座侧盖,便于充电装置的安装和检修。
20、在一实施例中,支撑底座壳体的底部可拆卸地设有底座安装板,底座安装板上可拆卸地安装有地脚。
21、通过在支撑底座壳体的底部设置地脚,可以适当调节充电装置的安装高度、保持充电装置水平,减小充电装置安装对地面平整度的要求,地脚上可以留有第四安装孔,便于与地面的固定,保证充电装置整体的稳定性。
22、本发明提供的机器人的充电装置,在处理模块与两组位置检测单元的配合下,能够确保机器人充电过程的可靠性和安全性,避免机器人未到位或错位时充电模块错误放电产生安全隐患,且无需对机器人的结构进行改动,以免造成成本增加,有利于增加机器人的充电装置的通用性。
- 还没有人留言评论。精彩留言会获得点赞!