一种移动通信系统及其多波束天线装置及使用方法与流程
本技术涉及移动通信,更具体地说,涉及一种移动通信系统及其多波束天线装置及使用方法。
背景技术:
1、在移动通信网络覆盖中,基站天线是覆盖网络的关键设备之一,而基站天线覆盖的距离和容量是衡量网络性能的重要指标。基站是相隔一定距离固定设置的,而在区域空间的应急通信中,目前一般采用应急通信车、对讲机或其他手段实现。
2、现有技术公开号为cn103165984b的文献提供一种移动通信系统,该装置包括三个定向天线和连接装置,使用时将定向天线通过连接装置与微波转动关节连接,然后将微波转动关节安装在浮空平台上,进行移动使用。
3、上述中的现有技术方案虽然通过连接装置和定向天线以及浮空平台可以实现组装使用以实现移动通信,但是安装多个定向天线时较为费时费力,且浮空平台移动需要消耗大量的能源,而仅依靠自身能源移动时行走的距离较短,影响移动通信的效果和工作效率。
4、鉴于此,我们提出一种移动通信系统及其多波束天线装置及使用方法。
技术实现思路
1、为了克服现有技术存在的一系列缺陷,本专利的目的在于针对上述问题,提供一种移动通信系统及其多波束天线装置,包括:
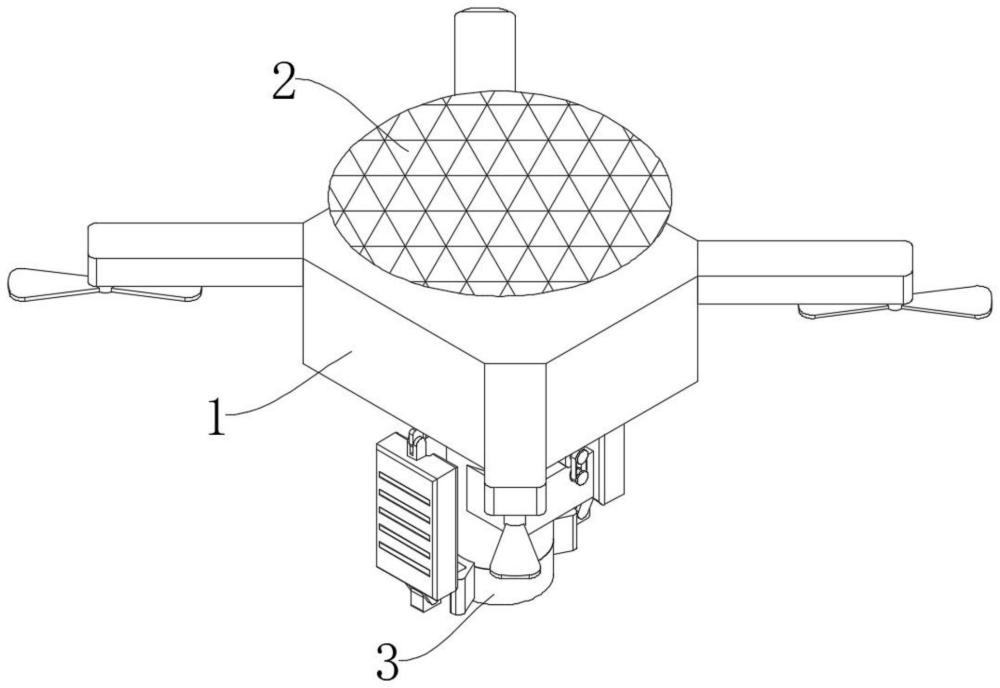
2、移动无人机1,所述移动无人机1用于搭载多波束天线装置本体3进行移动通信;
3、太阳能板2,所述太阳能板2设置于移动无人机1的顶端,所述太阳能板2用于收集并将太阳能转化为电能供移动无人机1和多波束天线装置本体3使用,所述太阳能板2的顶面设置为弧面状;
4、多波束天线装置本体3,所述多波束天线装置本体3用于通信,所述多波束天线装置本体3包括连接柱壳4,所述连接柱壳4的内侧固定设置有“t”字形的导向轨405,所述导向轨405的另一端滑动设置有升降柱6,所述升降柱6的顶端侧面对称设置有条形支耳601,所述条形支耳601的中部两侧均对称转动设置有连接构件602,位于同一侧的两个连接构件602之间转动设置有电动伸缩杆603,所述电动伸缩杆603的另一端均转动均设置有连接支架604,所述连接支架604的另一端固定设置有定向天线605;
5、所述连接柱壳4的顶端固定设置有顶部外壳402,所述顶部外壳402的外侧对应电动伸缩杆603的位置对称开设有收纳滑槽4021,所述电动伸缩杆603均转动设置于相对应的收纳滑槽4021中;
6、所述连接柱壳4的底端固定设置有底部外壳403,所述底部外壳403的侧面对称固定设置有固定卡块704,位于同一侧的所述固定卡块704与收纳滑槽4021的中心线重合,所述定向天线605的底端转动连接有连接块606,所述连接块606通过调节套壳607滑动限位于固定卡块704的内侧。
7、上述技术方案中,升降柱6升起可以将定向天线605向外侧打开,从而达到工作状态,进行信号的发射,减少了安装的繁琐操作,提高了工作效率,更加便于应急通信的使用;使用完毕将定向天线605收回即可,便于存放和运输;而在移动无人机1移动时,太阳能板2可以对太阳光进行全方位接收,从而为移动无人机1和多波束天线装置本体3提供一定的能源,提高其续航能力以达到更长时间的工作。
8、优选的,所述连接柱壳4的外侧固定设置有动力罩壳401,所述连接柱壳4的侧面对应动力罩壳401的位置开设有缺口404,所述连接柱壳4的内部通过缺口404与所述动力罩壳401的内部相连通,所述动力罩壳401的内部设置有动力机构,所述动力机构用于驱动升降柱6升降,从而实现定向天线605的展开或者收纳。
9、上述技术方案中,动力罩壳401用于保护动力机构中的零件。
10、优选的,所述动力机构包括与动力罩壳401固接的马达a5,所述马达a5的驱动端固定设置有皮带轮a501,所述皮带轮a501通过同步带a502与皮带轮b503传动连接,所述皮带轮b503的一端固定设置有蜗杆505,所述蜗杆505啮合设置有驱动齿轮504,所述驱动齿轮504的外侧啮合设置有从动齿轮507,所述从动齿轮507通过连接杆b509同轴连接有联动齿轮508,所述联动齿轮508啮合设置于升降柱6的外侧。
11、通过采用上述技术方案,动力机构可以驱动升降柱6的升降。
12、优选的,所述蜗杆505贯穿并转动设置于动力罩壳401的一侧,所述驱动齿轮504的中间固定设置有连接杆a506,所述连接杆a506和连接杆b509均转动设置于动力罩壳401的内部两侧。
13、上述技术方案中,动力机构可以驱动定向天线605使用状态的切换。
14、优选的,所述底部外壳403的内部设置有辅助收缩机构,所述底部外壳403对应固定卡块704的侧面开设有放置槽4031。
15、上述技术方案中,放置槽4031便于辅助收缩机构的使用。
16、优选的,所述辅助收缩机构包括马达b7,所述马达b7的驱动端固定设置有锥齿盘701,所述锥齿盘701的外侧对称啮合设置有锥齿轮702,所述锥齿轮702相互远离的一端均固定设置有螺纹杆703,所述螺纹杆703的外端均穿过放置槽4031伸出所述底部外壳403并螺纹连接于相应调节套壳607的内端。
17、上述技术方案中,辅助收缩机构可以将定向天线605的底端向外侧推出,或者向内侧收入,用于辅助工作状态的切换,也便于不使用时运输存放。
18、优选的,所述马达b7固定设置于底部外壳403的内部底端,所述锥齿盘701转动设置于连接柱壳4的底端,所述螺纹杆703贯穿并转动设置于固定卡块704的一侧。
19、上述技术方案中,辅助收缩机构可以更好的运行。
20、优选的,所述定向天线605的展开角度最大为180°。
21、通过采用上述技术方案,两个定向天线605就能达到全方位的信号发射。
22、优选的,所述升降柱6的外侧开设有用于与联动齿轮508啮合连接的齿槽,所述齿槽为升降柱6总长度的三分之二。
23、通过采用上述技术方案,齿槽的总长度为升降柱6的升降范围,防止升降柱6升降过度而损坏定向天线605。
24、本技术的目的还在于提供一种移动通信系统及其多波束天线装置的使用方法,包括以下步骤:
25、将多波束天线装置本体3在安装在移动无人机1的底端,启动马达a5带动皮带轮a501转动并通过同步带a502带动皮带轮b503转动,皮带轮b503带动蜗杆505转动,蜗杆505带动驱动齿轮504转动,驱动齿轮504带动从动齿轮507转动,从而通过连接杆b509带动联动齿轮508转动,联动齿轮508带动升降柱6升起,此时,电动伸缩杆603的内端跟随升降柱6升起并逐渐趋向于水平状态,而定向天线605整体为倾斜状态,因为此时定向天线605的顶端向外侧移动;
26、启动马达b7带动锥齿盘701转动,从而带动锥齿轮702转动,锥齿轮702带动相应螺纹杆703转动,从而通过调节套壳607与连接块606将定向天线605的底端向外侧推出,使定向天线605达到竖直的工作状态;
27、不使用驱动升降柱6下降,驱动电动伸缩杆603收缩,此时,定向天线605收回。
28、与现有技术相比,本技术至少具有如下技术效果或优点:
29、本技术中,升降柱升降可以带动定向天线的顶端向外侧或者内侧倾斜,便于扩大或者缩小两个定向天线之间的距离,不仅避免了繁琐的安装,也便于使用完毕后的收回。
- 还没有人留言评论。精彩留言会获得点赞!