一种控制方法、控制装置及控制器与流程
1.本申请涉及电机控制技术领域,更具体的说,涉及关于电机弱磁控制的一种控制方法、控制装置及控制器。
背景技术:
2.当前电机在变频领域应用较广泛,然而,为了获取更高转速、提高空载或轻载效率或者在有限制的母线电压条件下使电机能运行在更高的转数上,需要对电机进行弱磁控制。
技术实现要素:
3.有鉴于此,本申请实施例提供了一种控制方法、控制装置及控制器,能够实现电机控制。
4.为解决上述技术问题,本申请采用了如下技术方案:
5.一种控制方法,应用于电机的弱磁控制,包括以下步骤:
6.根据电机q轴电流iq确定q轴电压下限值uql;
7.根据实际电压饱和率edratio和目标电压饱和率edratio_c计算电压饱和率误差值err,其中,err=edratio_c-edratio;
8.当err<0且q轴电压uq大于所述q轴电压下限值uql时,利用正积分系数k1对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;
9.根据所述d轴电流补正值id_shift和d轴电流基础值ids之和确定d轴电流指令值idc;
10.利用所述d轴电流指令值idc控制所述电机运行。
11.可选的,所述确定q轴电压下限值uql包括步骤:根据电机q轴电流iq确定q轴电压下限值uql。
12.可选的,上述控制方法还包括步骤:
13.当err<0且q轴电压uq不大于所述q轴电压下限值uql时,利用负积分系数k2对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift。
14.可选的,当所述电压饱和率误差值err大于或等于0时,利用正积分系数k3对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift。
15.可选的,所述正积分系数k1、所述负积分系数k2或者所述正积分系数k3与所述实际电压饱和率edratio成反比。
16.可选的,所述正积分系数k1与所述q轴电压uq和所述q轴电压下限值uql的差值成正比;
17.或者,
18.所述负积分系数k2与所述q轴电压uq和所述q轴电压下限值uql的差值成正比。
19.可选的,所述正积分系数k3与所述q轴电压uq的绝对值成正比。
20.可选的,所述根据电机q轴电流iq确定q轴电压下限值uql包括利用以下公式计算uql:
21.uql=n*r*iq;
22.其中,n为正数,r为所述电机相电阻。
23.可选的,所述控制方法还包括:
24.对所述d轴电流补正值id_shift进行制限,所述d轴电流补正值id_shift的下限值其中为电机磁通量,l
d
为d轴电感量;
25.所述d轴电流补正值id_shift的上限值uplimit为设定值。
26.本申请实施例还提供了一种控制装置,应用于电机的弱磁控制,包括:
27.下限确定单元,用于根据电机q轴电流iq确定q轴电压下限值uql;
28.误差计算单元,用于根据实际电压饱和率edratio和目标电压饱和率edratio_c计算电压饱和率误差值err,其中,err=edratio_c-edratio;
29.电流补正值获取单元,用于当err<0且q轴电压uq大于所述q轴电压下限值uql时,利用正积分系数k1对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;
30.电流指令值确定单元,用于根据所述d轴电流补正值id_shift和d轴电流基础值ids之和确定d轴电流指令值idc;
31.控制单元,用于利用所述d轴电流指令值控制所述电机运行。
32.可选的,所述电流补正值获取单元还用于当err<0且q轴电压uq不大于所述q轴电压下限值uql时,利用负积分系数k2对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;
33.或者所述电流补正值获取单元还用于当所述电压饱和率误差值err大于或等于0时,利用正积分系数k3对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift。
34.可选的,上述控制装置还包括:
35.制限单元,用于对所述d轴电流补正值id_shift进行制限,所述d轴电流补正值id_shift的下限值其中为电机磁通量,l
d
为d轴电感量;
36.所述d轴电流补正值id_shift的上限值uplimit为设定值。
37.本申请实施例还提供了一种控制器,应用于电机的弱磁控制,设置有如上所述的控制装置。
38.本申请实施例还提供了另一种控制器,应用于电机的弱磁控制,包括至少一个处理器和存储器,所述存储器用于存储计算机程序或指令,所述处理器用于执行上述计算机程序或指令,以使所述控制器实现如下操作:
39.根据电机q轴电流iq确定q轴电压下限值uql;
40.根据实际电压饱和率edratio和目标电压饱和率edratio_c计算电压饱和率误差值err,其中,err=edratio_c-edratio;
41.当err<0且q轴电压uq大于所述q轴电压下限值uql时,利用正积分系数k1对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;
42.根据所述d轴电流补正值id_shift和d轴电流基础值ids之和确定d轴电流指令值
idc;
43.利用所述电流指令值idc控制所述电机运行。
44.可选的,所述处理器执行计算程序或指令,以使所述控制器还实现如下操作:
45.当err<0且q轴电压uq不大于所述q轴电压下限值uql时,利用负积分系数k2对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;
46.当所述电压饱和率误差值err大于或等于0时,利用正积分系数k3对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift。
47.本申请实施例提供了一种控制方法,应用于电机控制,该方法在q轴电压大于其下限值时,利用正积分系数对电压饱和率误差值进行积分,得到d轴电流补正值,再将该d轴电流补正值叠加到d轴电流基础值,根据叠加后的值确定d轴电流指令值,最后利用d轴电流指令值进行电机控制,从而实现电机控制,进一步的还能实现电机的弱磁控制。
附图说明
48.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
49.图1为一种电机控制示意图;
50.图2为一种电机弱磁控制的信号流向控制图;
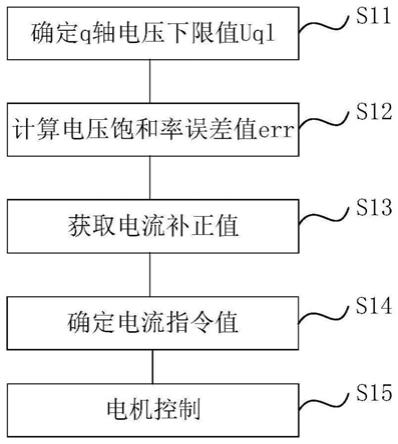
51.图3为本申请实施例提供的一种控制方法流程图;
52.图4为本申请实施例提供的一种控制装置框图;
53.图5为本申请实施例提供的一种电机弱磁控制的信号流向控制图。
具体实施方式
54.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
55.电机控制中,为使电机转数可以更大提升,需要弱磁控制模块,对d/q轴电流进行计算控制,弱磁控制采用id补偿法。图1为一种电机控制示意图,如
56.图1所示,电流采样模块采样电机三相相电流后,通过坐标转换得到d轴电流实际值id和q轴电流实际值iq,对位置推算模块计算得到的位置信息(比如实际转速w_e)和目标转速w_c的误差值进行pi(比例积分)控制,得到总电流指令值is,总电流指令值is经过弱磁模块得到q轴电流指令值iqc和d轴电流指令值idc,d/q轴电流指令值idc/iqc与d/q轴电流实际值id/iq的差值输入电压指令运算模块后得到d轴电压ud和q轴电压uq,再通过坐标转换将d轴电压ud和q轴电压uq转换为三相相电压指令,最后再通过svpwm((space vector pulse width modulation:空间矢量脉宽调制)生成模块生成pwm(pulse width modulation:脉宽调制)信号,控制6个开关管的开关,从而控制电机的工作。且电压指令运算模块之后,再通过ud和uq进行总电压us的计算,通过us判断是否需要弱磁处理;在一个实
施例中,实际电压饱和率edratio与us/vdc成正比,当us较大时,实际电压饱和率增大,当其大于目标电压饱和率时,需要弱磁处理,此时弱磁模块通过计算调整d轴电流指令值idc,实现不同程度的弱磁控制。
57.上述弱磁控制时,如图2所示,由速度环pi控制得出的总电流指令is,输入至弱磁模块,再通过mtpa计算(公式1)得出d轴电流基础值ids,ids可作为d轴电流指令值idc的上限制限值,idc下限值设定为idlimit,idlimit按公式2给出。
[0058][0059][0060]
图2中,edratio_c为目标的电压饱和率,edratio为实际电压饱和率,通过pi控制,计算得出d轴电流补正值id_shift,id_shift作为ids的补正值加入至ids,经上下限制限后,最终得出idc,再利用idc对电机d轴实际电流值进行控制,以实现弱磁的目的。
[0061]
然而,由于电机在高速运行的时候,由电阻引起的电压压降可以忽略不计,则电机方程可写成以下形式:
[0062]
u
d
=-w
e
×
l
q
×
i
q
;
[0063]
其中,w
e
表示电机转速,电机在实际运行过程中,u
q
≤0时,电机将不能稳定的运行。由电机方程式可知理想的情况下,时,u
q
≤0,由此,为防止电机出现不稳定状态而失去控制,在弱磁运行过程中,需要对idc输出前进行下限制限,制限值为
[0064]
然而磁通及d轴电感l
d
,是电机的参数,将随着弱磁的深入,在不同电流条件下,将会发生一定的变化,并且在无速度传感器中,由于位置角度在不同负载条件下,存在一定的偏差,使得存在d轴分量的磁通计算值实际会产生变动,使在弱磁过程中,idc在到达之前,就可能使得u
q
≤0,提前出现不稳定的运行状态,从而使电机失控。
[0065]
基于此,本申请实施例提供了一种控制方法,应用于电机的弱磁控制,如图3所示,该控制方法包括以下步骤:
[0066]
s11、确定q轴电压下限值uql:具体的,在一个实施例中步骤s11包括根据电机q轴电流iq确定q轴电压下限值uql;
[0067]
s12、计算电压饱和率误差值err:根据实际电压饱和率edratio和目标电压饱和率edratio_c计算电压饱和率误差值err,其中,err=edratio_c-edratio;实际电压饱和率edratio可以为2*us/vdc。
[0068]
s13、获取电流补正值:当err小于零且q轴电压uq大于q轴电压下限值uql时,利用正积分系数k1对电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;其中,当err<0时,需要弱磁处理。
[0069]
s14、确定电流指令值:根据所述d轴电流补正值id_shift和d轴电流基础值ids之
和确定d轴电流指令值idc;
[0070]
s15、电机控制:利用所述d轴电流指令值idc控制所述电机运行。
[0071]
其中,d轴电流基础值ids可为零值,或其它方法决定的基础值,比如如图5所示,为经过mtpa算法得到的ids值。
[0072]
本实施例中,当q轴电压uq大于所述q轴电压下限值uql时,表示电机处于稳定状态,当err小于零时,利用正积分系数k1对电压饱和率误差值err进行积分得到d轴电流补正值id_shift,从而实现弱磁控制;且通过q轴电压下限值的设定,可以提高弱磁控制时的稳定性。另外,本实施例弱磁控制仅使用积分计算,便于弱磁方向的控制。
[0073]
然而在上述实施例中,如果弱磁持续加深,将会出现q轴电压uq小于所述q轴电压下限值uql的情况,此时,如果继续用正积分系数k1进行积分运算,将导致uq继续减小,会造成电机运行不稳定,使电机失控。因此,在一个实施例中,还设置:当需要弱磁(实际电压饱和率大于目标电压饱和率,err<0)且q轴电压uq不大于所述q轴电压下限值uql时,利用负积分系数k2对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift。本实施例中,利用负积分系数k2进行积分运算,可以使得d轴电流补正值id_shift绝对值减小,从而使得uq增大,使得uq回归到uql以上,进一步保证电机的稳定运行。
[0074]
进一步的,在上述实施例中,当电机负载变小或者当d轴电流补正值id_shift不断减小,即d轴电流补正值id_shift和d轴电流基础值ids之和不断减小,使得总电压us减小,实际电压饱和率edratio减小,因此,电压饱和率误差将增大,err有可能增大到大于等于0,此时,利用正积分系数k3对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift。本实施例中,因为err≥0,k3为正积分系数,因此,id_shift往正方向增大,d轴电流往正方向增大。在一个实施例中,可以设置正积分系数k3与q轴电压uq的绝对值成正比。
[0075]
进一步的,在以上实施例中,可以设置正积分系数k1、负积分系数k2或者正积分系数k3与实际电压饱和率edratio成反比。本实施例中,当edratio越大,积分速度越慢,确保在弱磁时当uq接近下限值时放缓弱磁进程,减慢不稳定进程。进一步的,本实施例中,可以设置正积分系数k1与q轴电压uq和q轴电压下限值uql的差值成正比;还可以设置负积分系数k2与q轴电压uq和q轴电压下限值uql的差值成正比。本实施例中,积分系数关联uq和uql,当uq与uql差值越小,即uq越接近极限值,积分速度越慢,从而减慢不稳定进程。一个实施例中积分系数同时关联(uq-uql)与饱和率edratio,此时,积分速度可变,提升弱磁快速性及稳定性。
[0076]
其中,进一步的,q轴电压下限值uql可以根据电机q轴电流iq确定,具体的,可以利用以下公式计算uql:
[0077]
uql=n*r*iq;
[0078]
其中,n为正数,r为所述电机相电阻。在弱磁过程中,通过将uq稳于n*r*iq水平,并且使其大于零,将避免弱磁过程的失控现象。且q轴电压下限值即q轴电压余量n*r*iqc关联q轴电流iq,该余量根据电流进行调节,可以保证弱磁程度越深,转数越高,下限值越大,即uq距离零的余量越高,进一步提高安全性。
[0079]
进一步的,如图5所示,在一个实施例中,本申请提供的弱磁控制方法还包括:对所述d轴电流补正值id_shift进行制限,所述d轴电流补正值id_shift的下限值其中为电机磁通量,l
d
为d轴电感量;所述d轴电流补正值id_
shift的上限值uplimit为一设定值,具体可以为0,当然也可以为其它值。
[0080]
基于上述用于电机弱磁控制的控制方法,本申请实施例还提供以一种控制装置,应用于电机的弱磁控制,如图4所示,包括:
[0081]
下限确定单元10,用于根据电机q轴电流iq确定q轴电压下限值uql;
[0082]
误差计算单元11,用于根据实际电压饱和率edratio和目标电压饱和率edratio_c计算电压饱和率误差值err,其中,err=edratio_c-edratio;
[0083]
电流补正值获取单元12,用于当err<0且q轴电压uq大于所述q轴电压下限值uql时,利用正积分系数k1对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;其中,当err<0时,需要弱磁处理。
[0084]
电流指令值确定单元13,用于根据所述d轴电流补正值id_shift和d轴电流基础值ids之和确定d轴电流指令值idc;
[0085]
控制单元14,用于利用所述d轴电流指令值idc控制所述电机运行。
[0086]
进一步,在上述控制装置中,电流补正值获取单元12还可以用于当err<0且q轴电压uq不大于所述q轴电压下限值uql时,利用负积分系数k2对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;
[0087]
另外,电流补正值获取单元还可以用于当所述电压饱和率误差值err大于或等于0时,利用正积分系数k3对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift。其中,k1、k2、k3的设置可以与上述控制方法提到的k1、k2、k3设置相同值。
[0088]
进一步的,该控制装置还可以包括制限单元,该制限单元,用于对所述d轴电流补正值id_shift进行制限,所述d轴电流补正值id_shift的下限值其中为电机磁通量,l
d
为d轴电感量;
[0089]
d轴电流补正值id_shift的上限值uplimit为一设定值,具体可以为0;当然也可以是其它值。
[0090]
本申请提供的控制装置不仅能够弱磁控制,通过q轴电压下限值的设定及积分系数的不同设置,还能进一步保证弱磁稳定。
[0091]
基于上述用于电机弱磁控制的控制装置,本申请实施例还提供了一种控制器,应用于电机的弱磁控制,设置有上述的控制装置:
[0092]
其中控制装置包括:
[0093]
下限确定单元10,用于根据电机q轴电流iq确定q轴电压下限值uql;
[0094]
误差计算单元11,用于根据实际电压饱和率edratio和目标电压饱和率edratio_c计算电压饱和率误差值err,其中,err=edratio_c-edratio;
[0095]
电流补正值获取单元12,用于当err<0且q轴电压uq大于所述q轴电压下限值uql时,利用正积分系数k1对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;其中,当err<0时,需要弱磁处理。
[0096]
电流指令值确定单元13,用于根据所述d轴电流补正值id_shift和d轴电流基础值ids之和确定d轴电流指令值idc;
[0097]
控制单元14,用于利用所述d轴电流指令值idc控制所述电机运行。
[0098]
进一步,在上述控制装置中,电流补正值获取单元12还可以用于当err<0且q轴电压uq不大于所述q轴电压下限值uql时,利用负积分系数k2对所述电压饱和率误差值err进
行积分,得到d轴电流补正值id_shift;
[0099]
另外,电流补正值获取单元12还可以用于当所述电压饱和率误差值err大于或等于0时,利用正积分系数k3对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift。其中,k1、k2、k3的设置可以与上述控制方法提到的k1、k2、k3设置相同值。
[0100]
进一步的,该控制装置还可以包括制限单元,该制限单元,用于对所述d轴电流补正值id_shift进行制限,所述d轴电流补正值id_shift的下限值其中为电机磁通量,l
d
为d轴电感量;
[0101]
d轴电流补正值id_shift的上限值uplimit为一设定值,具体可以为0;当然也可以为其它值。
[0102]
基于上述用于弱磁控制的控制方法,本申请实施例还提供了一种控制器,应用于电机的弱磁控制,包括至少一个处理器和存储器,所述存储器用于存储计算机程序或指令,所述处理器用于执行上述计算机程序或指令,以使所述控制器实现如下操作:
[0103]
根据电机q轴电流iq确定q轴电压下限值uql;
[0104]
根据实际电压饱和率edratio和目标电压饱和率edratio_c计算电压饱和率误差值err,其中,err=edratio_c-edratio;
[0105]
当err<0且q轴电压uq大于所述q轴电压下限值uql时,利用正积分系数k1对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;
[0106]
根据所述d轴电流补正值id_shift和d轴电流基础值ids之和确定d轴电流指令值idc;
[0107]
利用所述d轴电流指令值idc控制所述电机运行。
[0108]
进一步的,处理器还执行计算程序或指令,以使所述控制器还实现如下操作:
[0109]
当err<0且q轴电压uq不大于所述q轴电压下限值uql时,利用负积分系数k2对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift;
[0110]
当所述电压饱和率误差值err大于或等于0,利用正积分系数k3对所述电压饱和率误差值err进行积分,得到d轴电流补正值id_shift。
[0111]
本申请提供的控制器不仅能够弱磁控制,通过q轴电压下限值的设定及积分系数的不同设置,还能进一步保证弱磁稳定。
[0112]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1