模块化DC互连设备及其系统的制作方法
模块化dc互连设备及其系统
技术领域
1.本公开的示例实施例总体上涉及电气设备和系统,更具体地,涉及模块化直流(dc)互连设备和系统。
背景技术:
2.电网通常由各种电源和传输线构成,电力通过电网传输并由接入电网的负载消耗。
3.电网的全局控制中心监控电网的运行或接收电网状况的信息,以便控制中心可以控制电网上的电力分配。例如,全局控制中心可以控制电网将电力引导到电力不足的地方。
4.馈电器(feeder)广泛用于这样的电网中,尤其是在中压系统中,并且包括交流互连设备和/或dc互连设备。在馈电器故障的情况下,需要将馈电器的dc互连设备与其他馈电器的dc互连设备断开。cn207426678u描述了一种传统的dc互连设备。然而,传统方法中的dc互连设备成本相对较高,并且占用相对较大的占用面积。
技术实现要素:
5.鉴于上述,本公开在此涉及一种低成本的模块化直流互连设备(mdcid)。本公开的示例实施例提出了用于互连电网中的馈电器的解决方案。
6.在第一方面,本公开的示例实施例提供了一种mdcid。mdcid包括至少三个操作支路、至少一个瞬态支路和本地控制器。所述至少三个操作支路的每个支路包括耦接到公共节点并配置为以正常模式传送dc电流的第一端子。所述至少一个瞬态支路耦接在所述至少三个操作支路中的不同支路的第二端子之间,并被配置为在故障清除模式下提供瞬态dc电流路径。所述本地控制器耦接到所述至少三个操作支路和所述至少一个瞬态支路,并被配置为控制所述至少三个操作支路和所述至少一个瞬态支路的操作。
7.在一些实施例中,所述本地控制器被进一步配置为接收故障清除信息并基于接收到的故障清除信息确定与故障清除模式下的故障清除操作相关联的操作支路和瞬态支路。
8.在一些实施例中,所述操作支路包括机械开关和/或与机械开关串联耦接的辅助断路器。所述瞬态支路包括主断路器和与主断路器并联耦接的能量吸收设备。
9.在一些实施例中,所述本地控制器被进一步配置为:接通所确定的瞬态支路中的主断路器以在故障清除模式下提供瞬态dc电流路径,响应于接通主断路器而关断所确定的操作支路中的机械开关和辅助断路器,并响应于完成关断机械开关而关断所确定的瞬态支路中的主断路器,并响应于关断主断路器而使得所确定的瞬态支路中的能量吸收设备吸收电能。
10.在一些实施例中,所述至少三个操作支路包括第一操作支路、第二操作支路和第三操作支路。第一操作支路包括耦接到公共节点的第一端子。第二操作支路包括耦接到公共节点的第一端子。第三操作支路包括耦接到公共节点的第一端子。所述至少一个瞬态支路包括耦接在第一操作支路的第二端子和第二操作支路的第二端子之间的第一瞬态支路。
11.在一些实施例中,所述本地控制器进一步配置为接通第一瞬态支路以传送dc电流,响应于接通第一瞬态支路而关断第一操作支路;并响应于完成关断第一操作支路而关断第一瞬态支路。
12.在一些实施例中,所述至少三个操作支路包括第一操作支路、第二操作支路和第三操作支路。所述第一操作支路包括耦接到公共节点的第一端子。所述第二操作支路包括耦接到公共节点的第一端子。第三操作支路包括耦接到公共节点的第一端子。所述至少一个瞬态支路包括耦接在第一操作支路的第二端子和第二操作支路的第二端子之间的第一瞬态支路,以及耦接在第二操作支路的第二端子和第三操作支路的第二端子之间的第二瞬态支路。
13.在一些实施例中,所述本地控制器进一步配置为接通第一瞬态支路以传送dc电流,响应于接通第一瞬态支路而关断第一操作支路;并响应于完成关断第一操作支路而关断第一瞬态支路。
14.在一些实施例中,所述本地控制器被进一步配置为接通第一和第二瞬态支路中的所述至少一个以传送dc电流,响应于接通第一和第二瞬态支路中的所述至少一个而关断第二操作支路,并响应于完成关断第二操作支路而关断第一和第二瞬态支路中的所述至少一个。
15.在一些实施例中,所述至少三个操作支路包括第一操作支路、第二操作支路、第三操作支路和第四操作支路。所述第一操作支路包括耦接到公共节点的第一端子。所述第二操作支路包括耦接到公共节点的第一端子。所述第三操作支路包括耦接到公共节点的第一端子。所述第四操作支路包括耦接到公共节点的第一端子。所述至少一个瞬态支路包括耦接在第一操作支路的第二端子和第二操作支路的第二端子之间的第一瞬态支路,以及耦接在第三操作支路的第二端子和第四操作支路的第二端子之间的第二瞬态支路。
16.在一些实施例中,所述至少三个操作支路包括第一操作支路、第二操作支路、第三操作支路、第四操作支路和第五操作支路。所述第一操作支路包括耦接到公共节点的第一端子。所述第二操作支路包括耦接到公共节点的第一端子。所述第三操作支路包括耦接到公共节点的第一端子。所述第四操作支路包括耦接到公共节点的第一端子。所述第五操作支路包括耦接到公共节点的第一端子。所述至少一个瞬态支路包括第一瞬态支路、第二瞬态支路和第三瞬态支路。所述第一瞬态支路耦接在第一操作支路的第二端子和第二操作支路的第二端子之间。所述第二瞬态支路耦接在第二操作支路的第二端子和第三操作支路的第二端子之间。所述第三瞬态支路耦接在第四操作支路的第二端子和第五操作支路的第二端子之间。
17.在一些实施例中,所述主断路器包括多个串联耦接的绝缘栅双极晶体管(igbt)。
18.在一些实施例中,完成关断机械开关包括将机械开关的第一和第二触点分开预定距离。
19.在一些实施例中,所述至少一个瞬态支路的数目不大于至少三个操作支路的数目与一的总和的一半。
20.在第二方面,本公开的示例实施例提供了电网系统。该系统包括第一互连设备、第二互连设备、第三互连设备和全局控制器。第一互连设备包括第一方面的模块化dc互连设备。第二互连设备包括第一方面的模块化dc互连设备并且选择性地耦接到第一互连设备。
第三互连设备包括第一方面的模块化dc互连设备。第三互连设备选择性地耦接到第一和第二互连设备,并且被配置为在第一、第二和第三互连设备之间传送dc电流。全局控制器被配置为与第一、第二和第三互连设备的本地控制器通信。
21.在一些实施例中,所述第一互连设备的模块化dc互连设备中的本地控制器被配置为接收故障清除信息并基于接收的故障清除信息确定与故障清除模式下的故障清除操作相关联的操作支路和瞬态支路。
22.在一些实施例中,所述操作支路包括机械开关和/或与机械开关串联耦接的辅助断路器。瞬态支路包括主断路器和与主断路器并联耦接的能量吸收设备。
23.在一些实施例中,所述本地控制器被进一步配置为接通所确定的瞬态支路中的主断路器以在故障清除模式下提供瞬态dc电流路径,响应于接通主断路器而关断所确定的操作支路中的机械开关和辅助断路器,并响应于完成关断机械开关而关断所确定的瞬态支路中的主断路器,并响应于关断主断路器而使得所确定的瞬态支路中的能量吸收设备吸收电能。
24.在一些实施例中,所述第一互连设备的模块化dc互连设备中的所述至少三个操作支路包括第一操作支路、第二操作支路和第三操作支路。所述第一操作支路包括耦接到公共节点的第一端子。第二操作支路包括耦接到公共节点的第一端子。所述第三操作支路包括耦接到公共节点的第一端子。所述第一互连设备的模块化dc互连设备中的所述至少一个瞬态支路包括耦接在第一操作支路和第二操作支路的第二端子之间的第一瞬态支路。
25.在一些实施例中,所述第一互连设备的模块化dc互连设备中的本地控制器进一步配置为接通第一瞬态支路以传送dc电流,响应于接通第一瞬态支路而关断第一操作支路;并响应于完成关断第一操作支路而关断第一瞬态支路。
26.根据本公开的实施例,可以容易地配置电网系统,并且可以通过利用模块化互连设备来提高电网系统的可靠性。
附图说明
27.通过以下参考附图的详细描述,本文公开的示例实施例的上述和其他目的、特征和优点将变得更容易理解。在附图中,本文公开的若干个示例实施例将以示例和非限制性方式进行说明,其中:
28.图1图示根据本公开的一些示例实施例的电网系统的框图;
29.图2图示传统mdcid的框图;
30.图3图示根据本公开的一些进一步示例实施例的三端mdcid的框图;
31.图4图示根据本公开的一些进一步示例实施例的三端mdcid的框图;
32.图5图示根据本公开的一些示例实施例的四端mdcid的框图;
33.图6图示根据本公开的一些示例实施例的五端mdcid的框图;
34.图7图示根据本公开的一些示例实施例的三端mdcid的框图;
35.图8图示根据本公开的一些示例实施例的三端mdcid的框图;
36.图9图示根据本公开的一些示例实施例的三端mdcid的框图;
37.图10图示根据本公开的一些示例实施例的四端mdcid的框图;
38.图11图示根据本公开的一些示例实施例的四端mdcid的框图;
39.图12图示根据本公开的一些示例实施例的五端mdcid的框图。
40.在整个附图中,相同或相应的参考标记指代相同或相应的部分。
具体实施方式
41.现在将参考若干个示例实施例来讨论这里描述的主题。讨论这些实施例的目的只是为了使本领域技术人员能够更好地理解并因此实施在此描述的主题,而不是暗示对该主题的范围的任何限制。
42.术语“包含”或“包括”及其变体应理解为开放术语,意思是“包括但不限于”。除非上下文明确另有指出,否则术语“或”要理解为“和/或”。术语“基于”要理解为“至少部分基于”。术语“可操作用于”是指可以通过用户或外部机制引发的操作来实现功能、动作、运动或状态。术语“一个实施例”和“一实施例”要理解为“至少一个实施例”。术语“另一实施例”要理解为“至少一个其他实施例”。
43.除非另有指出或限制,否则术语“安装”、“连接”、“支撑”和“耦接”及其变体被广泛使用,涵盖直接和间接的安装、连接、支撑和耦接。此外,“连接”和“耦接”不限于物理或机械的连接或耦接。在下面的描述中,相同的附图标记和标签用于描述图中相同、相似或对应的部分。可能在下面包括明确的和隐含的其他定义。
44.如上所述,传统的电网系统可能包括具有mdcid的大量馈电器,而传统的mdcid成本昂贵并且对总成本的贡献很大。因此,希望减少mdcid和传统电网系统的成本。
45.图1图示根据本公开的一些示例实施例的电网系统1的框图。电网系统1包括彼此电耦接的第一模块化互连设备(mid)10、第二mid 20和第三mid 30。术语“模块化互连设备”在本文中是指这样的互连设备:其具有包括实现类似或相同互连功能的端口组件的类似或相同架构,并且可以彼此耦接和替换。术语“本地控制器”在本文中是指mid设备中的控制器,而不是通常由传统电网系统共用的全局控制器。
46.mid 10可以耦接到ac电源ac1。尽管图1中的每个mid被图示为耦接到ac电源,但这仅用于说明,并不暗示对此处描述的主题的范围有任何限制。例如,一个mid可以经由另一mid共用ac电源。在一示例中,图1中的mid 20可以与电源ac2断开连接,并与mid1共用电源ac1。
47.电网系统1包括全局控制器2。全局控制器2可以从电网系统中的多个mid或其他感测节点收集信息,并通过向mid发送指令来控制mid的操作。在电网系统1中需要另外的mid的情况下,全局控制器2可以控制某些mid,通常是该另外的mid将耦接到的mid,以暂时禁用,并在成功地将该另外的mid耦接到被禁用的mid时启用被禁用的mid和该另外的mid。
48.在需要从电网系统1中移除mid的情况下,全局控制器2可以控制某些mid,通常是mid耦接到的mid,以暂时禁用,并且在成功地耦接了被禁用的mid和/或合并新的mid时启用被禁用的mid。在全局控制器2未能或者丢失了与mid的通信的情况下,则mid中的至少一个控制器可以操作瞬态主机控制器,而其他控制器可以与该主机控制器通信以用于电网系统1的正确运行。
49.mid 10包括耦接到ac电源ac1的第一开关12、常开点(nop)开关14、本地公共节点13、第二开关16、dc
‑
ac转换器18c和mdcid 11。本地公共节点13耦接到第一开关12、nop开关14、第二开关16和经由电缆c5耦接到另一个mid(例如mid 30)的支路中的所有。dc
‑
ac转换
器18被配置为根据需要将ac电流转换为dc电流,或将dc电流转换为ac电流。mdcid 11分别经由电缆c1和c2耦接到mid 20和30的mdcid,并且被配置为在mid 10、20和30之间选择性地使dc电流流动。
50.图2图示传统mdcid 40的框图。mdcid通常是三端设备。这仅用于说明,并不暗示对此处描述的主题的范围有任何限制。可以在一些配置中采用更多端子的mdcid,例如四端子mdcid或五端子mdcid,如下所述。
51.mdcid 40包括耦接到图1的转换器18的第一端子,经由第一电缆c1耦接到图1的mdcid 20的第二端子,以及经由第二电缆c2耦接到图1的mdcid 30的第三端子。mdcid 40包括耦接在相应端子和公共节点之间的三个开关单元。三个开关单元基本相同,描述第一开关单元41以进行说明。
52.第一开关单元41包括操作支路、瞬态支路和本地控制器46。操作支路包括机械开关43和与机械开关43串联耦接的辅助断路器42。尽管机械开关43和辅助断路器42是针对操作支路进行说明的,但这仅用于说明,并不暗示对此处描述的主题的范围有任何限制。操作支路的其他配置是可能的。例如,操作支路可以包括机械开关43或辅助断路器42,或更多开关或断路器。
53.辅助断路器42可以包括至少一个固态开关,例如半导体开关,以提供电路的快速断开。操作支路被配置为在正常操作模式下传送dc电流。术语“正常操作模式”是指包括mdcid的电气系统正常运行而不需要故障清除的模式。
54.瞬态支路包括主断路器45和能量吸收设备44。主断路器45可以包括一系列固态开关,例如绝缘栅双极晶体管(igbt)。主断路器45是基于性能要求设计的,因此igbt的数目及其相应的占用面积是性能要求的函数。尽管igbt是针对瞬态支路进行说明的,但这仅用于说明,并不暗示对此处描述的主题的范围有任何限制。可以在瞬态支路中应用其他能够承受中压的半导体开关。
55.能量吸收设备44例如可以是一个电容器或一系列电容器,并且被配置为当主断路器45关断时吸收来自瞬态主断路器45的能量。当主断路器45被关断时,大量电能可从主断路器45释放。在没有能量吸收设备44的情况下,电能可能会造成损坏,例如设备损坏。
56.开关单元41还包括本地控制器46。本地控制器46耦接到机械开关43、辅助断路器42、主断路器45和能量吸收设备44以控制它们的操作。本地控制器46被配置为从其他本地控制器、全局控制器2或传感器接收信息,并基于接收到的信息确定mdcid的操作。此外,本地控制器46还可以向其他本地控制器、全局控制器2或传感器发送信息。
57.在正常操作模式下,瞬态支路不传送dc电流。当发生故障时,mdcid进入故障清除模式。在故障清除模式下,与故障直接关联的mdcid可能需要从电网中移除,并且可能被更换为新的mdcid。在故障清除模式期间,确定要移除的mdcid与其他功能性mdcid断电。例如,在包括mdcid 40的mid 10处发生故障的情况下,第一开关单元41可能会被关断,而mdcid 40中的第二和第三开关单元可能会被保持接通,以便将mid 10与mid 20和30隔离,而不影响mid 20和30之间的正常dc传送。
58.在图2的配置中,每个开关单元包括瞬态支路和操作支路。这在成本上可能很昂贵,这是因为igbt非常昂贵并且它们占据了mdcid成本的大部分。此外,每个开关单元具有本地控制器46,导致在传统mdcid 40中的三个本地控制器。mdcid 40中的三个本地控制器
进一步增加了成本,并增加了控制复杂度。由于三个开关单元中的每一个都使用igbt和控制器,因此mdcid 40占用了非常大的体积和占用面积。
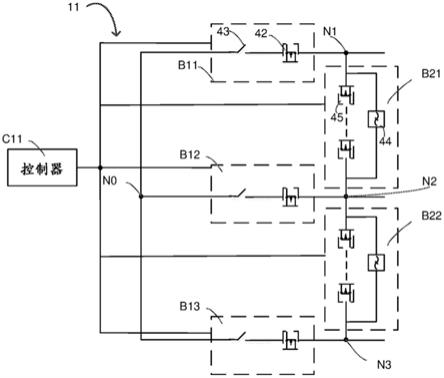
59.图3图示根据本公开的一些进一步示例实施例的三端mdcid 11的框图。mdcid 11包括本地控制器c11、第一操作支路b11、第二操作支路b12、第三操作支路b12、第一瞬态支路b21和第二瞬态支路b22。第一、第二和第三操作支路中的每一个都类似于图2的操作支路,并且具有耦接到公共节点n0的第一端子。第一瞬态支路b21耦接在第一操作支路b11和第二操作支路b12的第二端子之间。第二支路b22耦接在第二操作支路b12和第三操作支路b13的第二端子之间。
60.本地控制器c11耦接到第一操作支路b11、第二操作支路b12、第三操作支路b12、第一瞬态支路b21和第二瞬态支路b22以控制它们的操作。本地控制器c11被配置为从其他本地控制器、全局控制器2或传感器接收信息,并基于接收到的信息确定mdcid的操作。此外,本地控制器c11还可以向其他本地控制器、全局控制器2或传感器发送信息。通过使用单个控制器c11,与传统mdcid 40相比,可以减少控制复杂度,并且可以减少mdcid 11的成本、占用面积和体积。
61.在故障的情况下,本地控制器c11被进一步配置为例如从另一个mdcid的本地控制器、全局控制器2或用于感测mid或mdcid中的故障的传感器接收故障清除信息。故障清除信息可以包括指示发生的故障、其位置和/或需要移除或更换的mdcid的信息。本地控制器c11可以基于接收到的故障清除信息确定与故障清除模式下的故障清除操作相关联的操作和瞬态支路。
62.在确定后,本地控制器可以在故障清除模式下接通所确定的瞬态支路中的主断路器45以提供瞬态dc电流路径,响应于接通主断路器45而关断所确定的操作支路中的机械开关43和辅助断路器,并响应于完成关断机械开关而关断所确定的瞬态支路中的主断路器45;以及响应于关断主断路器而使所确定的瞬态支路中的能量吸收设备44吸收电能。
63.例如,在故障发生在连接到节点n1的第一端子的情况下,第一端子需要在故障清除模式下与mdcid 11的其他端子隔离。本地控制器c11接通第一瞬态支路b21以为第一端子创建dc路径,然后关断第一操作支路b11。在第一操作支路b11完全关断后,本地控制器c11关断第一瞬态支路b21,使得第一端子与第二和第三端子隔离,而不会中断第二端子和第三端子之间的正常的dc传送。
64.具体地,本地控制器c11接通第一瞬态支路b21中的主断路器以在故障清除模式下提供瞬态dc电流路径,响应接通主断路器而关断所确定的操作支路(在该示例中第一操作支路b11)中的机械开关和辅助断路器,并响应于完成关断机械开关而关断第一瞬态支路b21中的主断路器,并响应于关断主断路器而使得瞬态支路b21中的能量吸收设备吸收电能。下文中,瞬态支路的接通是指接通瞬态支路的主断路器,瞬态支路的断开是指关断主断路器并且响应于关断主断路器而使得能量吸收设备吸收电能。
65.机械开关通常包括第一和第二触点。在它们物理接触的情况下,机械开关可以正常传导dc电流。当机械开关需要关断时,第一和第二触点需要分开一预定距离以确保安全。低于该预定距离,有可能dc电流会击穿。这种分开通常需要一些时间。在这种情况下,完成机械开关的关断包括将机械开关的第一和第二触点分开预定距离。下文中的术语“完成关断”是指将机械开关的第一和第二触点分开预定距离。
66.在故障发生在连接到节点n2的第二端子的情况下,则第二端子需要在故障清除模式下与mdcid 11的其他端子隔离。本地控制器c11接通第一瞬态支路b21和第二瞬态支路b22中的至少一个以创建用于第二端子的dc路径,然后关断第二操作支路b12。当第二操作支路b12完全关断时,本地控制器c11关断第一瞬态支路b21和第二瞬态支路b22中的至少一个,使得第二端子与第一端子和第三端子隔离而不中断第一和第三端子之间的正常dc传送。
67.第三端子处发生故障的场景等同于第一端子处发生故障的场景。为简洁起见,此处省略了对该场景的描述。与传统mdcid 40相比,mdcid 11具有较少的瞬态支路。这显著减少了mdcid的成本、体积和占用面积。此外,较少的瞬态支路将进一步简化本地控制器的控制复杂度并提高mdcid的可靠性。
68.图4图示了根据本公开的一些进一步示例实施例的三端mdcid 15的框图。在某些场景下,故障发生在本地站点附近或站点处,并且可以立即消除。在这种情况下,图3的配置可以在图4中进一步简化。
69.mdcid 15包括本地控制器c11、第一操作支路b11、第二操作支路b12、第三操作支路b12和第一瞬态支路b21。本地控制器c11耦接到第一操作支路b11、第二操作支路b12、第三操作支路b12和第一瞬态支路b21以控制它们的操作。通过使用一个瞬态支路b21,与传统mdcid 11相比,可以减少控制复杂度,并且可以减少mdcid 15的成本、占用面积和体积。
70.在故障发生在连接到节点n1的第一端子的情况下,第一端子需要在故障清除模式下与mdcid 11的其他端子隔离。本地控制器c11接通第一瞬态支路b21为第一端子创建dc路径,然后关断第一操作支路b11。在第一操作支路b11完全关断后,本地控制器c11关断第一瞬态支路b21,使得第一端子与第二和第三端子隔离,而不会中断第三和第二端子之间的正常的dc传送。
71.在故障发生在连接到节点n2的第二端子的情况下,第二端子需要在故障清除模式下与mdcid 11的其他端子隔离。第二端子处的故障可以立即在本地站点移除。在这种情况下,第二端子不需要瞬态支路。这将进一步减少mdcid的成本、体积和占用面积,以及相比于图3的配置的本地控制器的控制复杂度,这是因为使用了较少的瞬态支路。
72.图5图示了根据本公开的一些示例实施例的四端mdcid 21的框图。mdcid 21可以应用于四个馈电器的环境。mdcid 21包括本地控制器c11、第一操作支路b11、第二操作支路b12、第三操作支路b12、第四支路b14、第一瞬态支路b21和第二瞬态支路b22。第一、第二、第三和第四操作支路中的每一个都类似于图2的操作支路,并且其具有耦接到公共节点n0的第一端子。第一瞬态支路b21耦接在第一操作支路b11和第二操作支路b12的第二端子之间。第二瞬态支路b22耦接在第三操作支路b13和第四操作支路b14的第二端子之间。
73.本地控制器c11耦接到(为了清楚起见未示出)第一操作支路b11、第二操作支路b12、第三操作支路b12、第四操作支路b14、第一瞬态支路b21和第二瞬态支路b22来控制它们的操作。通过使用单个控制器c11,与传统的四端mdcid相比,可以减少控制复杂度,并且可以减少mdcid 21的成本、占用面积和体积。
74.在故障的情况下,本地控制器c11被进一步配置为例如从另一个mdcid的本地控制器、全局控制器2或用于感测mid或mdcid中的故障的传感器接收故障清除信息。故障清除信息可包括指示发生的故障、其位置和/或需要移除或更换的mdcid的信息。本地控制器c11可
以基于接收到的故障清除信息确定与故障清除模式下的故障清除操作相关联的操作和瞬态支路。
75.一旦确定,本地控制器可以在所确定的瞬态支路中接通主断路器45以在故障清除模式下提供瞬态dc电流路径,响应于接通主断路器45而关断所确定的操作支路中的机械开关43和辅助断路器42,并响应于完成关断机械开关而关断所确定的瞬态支路中的主断路器45;以及响应于关断主断路器而使得所确定的瞬态支路中的能量吸收设备44吸收电能。
76.在故障发生在连接到节点n1的第一端子的情况下,第一端子需要在故障清除模式下与mdcid 11的其他端子隔离。本地控制器c11接通第一瞬态支路b21为第一端子创建dc路径,然后关断第一操作支路b11。在第一操作支路b11完全关断时,本地控制器c11关断第一瞬态支路b21,从而使第一端子与第二和第三端子隔离,而不会中断第二端子和第三端子之间的正常dc传送。
77.第二、三、四端子处发生故障的场景等同于第一端子处发生故障的场景。为简洁起见,此处省略了对该场景的描述。
78.与传统mdcid 40相比,mdcid 21具有较少的瞬态支路。由于使用较少的高成本的半导体开关这一事实,这显著减少了mdcid的成本、体积和占用面积。此外,较少瞬态的支路将进一步简化本地控制器的控制复杂度并提高mdcid的可靠性。通常,根据本公开的实施例,至少一个瞬态支路的数目不大于至少三个操作支路的数目和一之总和的一半。例如,在三端mdcid的配置中,瞬态支路的数目不能大于两个,而在四端mdcid的配置中,瞬态支路的数目不能大于两个。
79.图6图示根据本公开的一些示例实施例的五端mdcid31的框图。五端mdcid 31可以具有类似于图3
‑
5的配置的星形配置。星形配置具有由所有操作支路的第一端子共用的公共节点n0。所有操作支路的第二端子都耦接到至少一个瞬态支路。
80.图6的配置的右侧部分类似于图3的配置,其操作类似于图3的配置的操作。在连接到第一操作支路b11的第一端子处发生故障的情况下,本地控制器c11接通第一瞬态支路b21,然后开始关断第一操作支路b11。dc电流流过瞬态支路b21和操作支路b12,并流过第三、第四和第五操作支路。一旦第一操作支路b11完全关断,本地控制器c11关断第一瞬态支路b21,从而可以清除第一端子处发生的故障。
81.在连接到第二操作支路b21的第二端子处发生故障的情况下,本地控制器c11接通第一瞬态支路b21和第二瞬态支路b22中的至少一个,然后开始关断第二操作支路b12。dc电流流过第一瞬态支路b21和第二瞬态支路b22中的至少一个和第一操作支路b11和第三操作支路b13中的至少一个,并且流过第四和第五操作支路。一旦第二操作支路b12完全关断,本地控制器c11关断第一瞬态支路b21和第二瞬态支路b22中的至少一个,使得能够清除在第二端子处发生的故障。
82.在连接到第四操作支路b14的第四端子处发生故障的情况下,本地控制器c11接通第三瞬态支路b23,然后开始关断第四操作支路b14。dc电流流过第三瞬态支路b23和第五操作支路b15,并流过第一、第二和第三操作支路。一旦第四操作支路b14完全关断,本地控制器c11关断第三瞬态支路b23,使得能够清除第四端子处发生的故障。
83.由于对称的拓扑,第三端子和第五端子处发生故障的场景分别与第一端子和第四端子处发生故障的场景类似。因此,为简洁起见,此处省略了针对第三端子和第五端子处发
生故障的场景的操作。
84.通过图6的配置,与具有五个瞬态支路的传统五端mdcid相比,瞬态支路的数目可以减少两个。可以理解,更多端子的mdcid可以类似地减少瞬态支路,只要瞬态支路由操作支路共用即可。例如,对于具有n个操作支路的配置,它可以具有不大于(n+1)/2的瞬态支路,其中n代表大于2的整数。
85.图7图示了根据本公开的一些示例实施例的三端mdcid 111的框图。mdcid 111包括第一操作支路b11、第二操作支路b12、第三操作支路b13、第一瞬态支路b21、第二瞬态支路b22、第三瞬态支路b23和本地控制器c11。mdcid 111具有其中三个操作支路连接成圆形的圆形配置,并具有其中瞬态支路耦接在公共节点n0和两个操作支路之间节点之间的星形配置。
86.本地控制器c11耦接到(为了清楚起见未示出)第一操作支路b11、第二操作支路b12、第三操作支路b12、第一瞬态支路b21、第二瞬态支路b22和第三瞬态支路b23以控制它们的操作。通过使用单个控制器c11,与传统mdcid 40相比,可以减少控制复杂度,并且可以减少mdcid 11的成本、占用面积和体积。
87.在第一和第三操作支路之间的第一端子处发生故障的情况下,本地控制器c11接通瞬态支路b22和b23,然后开始相继或者同时关断操作支路b11和b13。在完成关断操作支路b11和b13时,本地控制器c11关断瞬态支路b22和b23。由于对称的拓扑,第二和第三端子处发生故障的场景与第一端子处发生故障的场景类似,为简洁起见,描述在此省略。
88.具体而言,本地控制器c11接通瞬态支路b22和b23中的主断路器以在故障清除模式下提供瞬态dc电流路径,响应于接通主断路器而关断所确定的操作支路中的机械开关和辅助断路器,并响应于完成关断机械开关而关断瞬态支路中的主断路器;并且响应于关断主断路器而使得瞬态支路b22和b23中的能量吸收设备吸收电能。
89.由于针对端子处的故障采用串联的两个瞬态支路的这一事实,与传统的mdcid中的瞬态支路相比,可以从一半性能要求的主断路器和能量吸收设备中选择每个瞬态支路中的主断路器和能量吸收设备。换句话说,传统的mdcid中单个瞬态支路的操作由图7配置中的两个瞬态支路共用。在这种情况下,图7中的瞬态支路实际上是图2中瞬态支路的“一半”。
90.例如,图7的瞬态支路的主断路器中串联连接的igbt的数目可以是图2的瞬态支路的主断路器中的串联连接的igbt数目的一半。此外,图7的瞬态支路的能量吸收设备中的电容器的电容可以是图2的瞬态支路的能量吸收设备中的电容器的电容的一半。换句话说,在图7的mdcid中将使用更少的igbt和电容器。与传统方法相比,这显著减少了成本、体积和占用面积。
91.图8图示根据本公开的一些示例实施例的三端mdcid 121的框图。在某些场景下,故障发生在本地站点附近或站点处,并且可以立即消除。在这种应用中,图7的配置可以在图8中进一步简化。
92.mdcid 121包括本地控制器c11、第一操作支路b11、第二操作支路b12、第三操作支路b12、第一瞬态支路b21和第二瞬态支路b22。本地控制器c11耦接到(为了清楚起见未示出)第一操作支路b11、第二操作支路b12、第三操作支路b12、第一瞬态支路b21和第二瞬态支路22以控制它们的操作。
93.在第一操作支路b11和第三操作支路b13之间的第一端子处发生故障的情况下,第
一端子需要在故障清除模式下与mdcid 121的其他端子隔离。本地控制器c11接通第二瞬态支路b22以为第一端子创建dc路径,然后相继或同时关断第一操作支路b11和第三操作支路b13。当第一操作支路b11和第三操作支路b13完全关断时,本地控制器c11关断第二瞬态支路b22,使得第一端子与第二和第三端子隔离,而不中断第二和第三端子之间的正常的dc传送。
94.在第二操作支路b12和第三操作支路b13之间的第二端子处发生故障的情况下,第二端子需要在故障清除模式下与mdcid 121的其他端子隔离。本地控制器c11接通第二瞬态支路b22以为第二端子创建dc路径,然后相继或同时关断第二操作支路b12和第三操作支路b13。当第二操作支路b12和第三操作支路b13完全关断时,本地控制器c11关断第二瞬态支路b22,使得第二端子与第一和第三端子隔离,而不中断第二和第三端子之间的正常的dc传送。在这种情况下,第二端子不需要瞬态支路。
95.尽管此处使用了第二瞬态支路b22,但这仅用于说明,并不暗示对此处描述的主题的范围有任何限制。可以使用第一瞬态支路b21,或者可以交替使用第一支路b21和第二支路b22。第三端子处发生故障的场景与第一端子处故障的场景类似,并且该故障可以通过类似的方式清除。通过图8的配置,可以进一步减少mdcid的成本、体积和占用面积,以及本地控制器的控制复杂度。
96.图9图示根据本公开的一些示例实施例的三端mdcid 131的框图。在某些场景下,故障发生在本地站点附近或站点处,并且可以立即消除。在这种应用中,图8的配置可以在图9中进一步简化。
97.mdcid 131包括本地控制器c11、第一操作支路b11、第二操作支路b12、第三操作支路b12和第一瞬态支路b21。本地控制器c11耦接到(为清楚起见未示出)第一操作支路b11、第二操作支路b12、第三操作支路b12和第一瞬态支路b21以控制它们的操作。通过使用单个瞬态支路b21,与传统mdcid 121相比,可以减少控制复杂度,并且可以减少mdcid 131的成本、占用面积和体积。
98.在第一操作支路b11和第二操作支路b12之间的第一端子处发生故障的情况下,第一端子需要在故障清除模式下与mdcid 131的其他端子隔离。本地控制器c11接通第一瞬态支路b21以为第一端子创建dc路径,然后相继或同时关断第一操作支路b11和第二操作支路b12。当第一操作支路b11和第二操作支路b12完全关断时,本地控制器c11关断第一瞬态支路b21,使得第一端子与第二和第三端子隔离,而不中断第二和第三端子之间的正常的dc传送。
99.在第一操作支路b11和第三操作支路b13之间的第二端子处发生故障的情况下,第二端子需要在故障清除模式下与mdcid 131的其他端子隔离。第二端子的故障可以立即在本地站点移除。在这种情况下,第二端子不需要瞬态支路。这将进一步减少mdcid的成本、数目和占用面积,以及本地控制器的控制复杂度。由于对称的拓扑,发生在第二操作支路b12和第三操作支路b13之间的第三端子处的故障可以与第一端子处的故障以相似的方式清除。
100.图10图示根据本公开的一些示例实施例的四端mdcid 141的框图。mdcid 141包括第一操作支路b11、第二操作支路b12、第三操作支路b13、第四操作支路b14、第一瞬态支路b21、第二瞬态支路b22、第三瞬态支路b23、第四瞬态支路b24和本地控制器c11。mdcid 141
具有其中三个操作支路连接成圆形的圆形配置,并且具有其中瞬态支路耦接在公共节点和两个操作支路之间节点之间的星形配置。
101.本地控制器c11耦接到(为了清楚起见未示出)第一操作支路b11、第二操作支路b12、第三操作支路b12、第四操作支路b14、第一瞬态支路b21、第二瞬态支路b22、第三瞬态支路b23和第四瞬态支路b24来控制它们的操作。通过使用单个控制器c11,与传统mdcid 40相比,可以减少控制复杂度,并且可以减少mdcid 11的成本、占用面积和体积。
102.在第一操作支路b11和第四操作支路b14之间的第一端子处发生故障的情况下,本地控制器c11接通第一瞬态支路b21和第二、第三和第四瞬态支路b22
‑
b24中的至少一个,然后相继或同时关断第一操作支路b11和第四操作支路b14。在完成关断第一操作支路b11和第四操作支路b14时,本地控制器c11关断第一瞬态支路b21和第二、第三和第四瞬态支路b22
‑
b24中的至少一个。
103.具体而言,本地控制器c11接通第一瞬态支路b21和第二、第三和第四瞬态支路b22
‑
b24中的至少一个中的主断路器以在故障清除模式下提供瞬态dc电流路径,响应于接通主断路器而关断第一操作支路b11和第四操作支路b14中的机械开关和辅助断路器,并响应于完成关断机械开关而关断第一瞬态支路b21和第二、第三和第四瞬态支路b22
‑
b24中的至少一个中的主断路器,以及响应于关断主断路器而使得第一瞬态支路b21中和第二、第三和第四瞬态支路b22
‑
b24的至少一个中的能量吸收设备吸收电能。由于对称的拓扑,其他端子处发生故障的场景与第一端子处发生故障的场景类似,为简洁起见,描述在此省略。
104.由于针对端子处的故障采用至少两个瞬态支路的这一事实,与传统的mdcid中的瞬态支路相比,可以从具有一半性能的主断路器和能量吸收设备中选择每个瞬态支路中的主断路器和能量吸收设备。换句话说,传统的mdcid中单个瞬态支路的操作由图10配置中的两个瞬态支路共用。在这种情况下,图10中的瞬态支路实际上是图2中瞬态支路的“一半”。与传统方法相比,这显著减少了成本、体积和占用面积。
105.图11图示根据本公开的一些示例实施例图的四端mdcid 151的框图。mdcid 141包括第一操作支路b11、第二操作支路b12、第三操作支路b13、第四操作支路b14、第一瞬态支路b21、第二瞬态支路b22和本地控制器c11。mdcid 151具有其中四个操作支路连接成圆形的圆形配置,并且具有其中第一瞬态支路b21耦接在第一和第三端子之间而第二瞬态支路b22耦接在第二和第四端子之间的交叉配置。
106.本地控制器c11耦接到(为了清楚起见未示出)第一操作支路b11、第二操作支路b12、第三操作支路b12、第四操作支路b14、第一瞬态支路b21和第二瞬态支路b22以控制它们的操作。通过使用单个控制器c11,与传统mdcid 40相比,可以减少控制复杂度,并且可以减少mdcid 151的成本、占用面积和体积。
107.在第一操作支路b11和第四操作支路b14之间的第一端子处发生故障的情况下,本地控制器c11接通第一瞬态支路b21,然后开始相继或同时地关断第一操作支路b11和第四操作支路b14。在完成关断第一操作支路b11和第四操作支路b14时,本地控制器c11关断第一瞬态支路b21。
108.在第二操作支路b12和第三操作支路b13之间的第三端子处发生故障的情况下,本地控制器c11接通第一瞬态支路b21,然后开始相继或同时地关断第二操作支路b12和第三操作支路b13。在完成关断第二操作支路b12和第三操作支路b13时,本地控制器c11关断第
一瞬态支路b21。
109.由于对称的拓扑,可以以与分别在第一和第三端子处发生故障类似的方式清除第二和第四端子处发生故障的情形。通过图11的配置,瞬态支路可以减少一半。与传统方法相比,这显著减少了成本、体积和占用面积。
110.图12图示根据本公开的一些示例实施例的五端mdcid 161的框图。mdcid 161包括第一操作支路b11、第二操作支路b12、第三操作支路b13、第四操作支路b14、第五操作支路b15、第一瞬态支路b21、第二瞬态支路b22、第三瞬态支路b23和本地控制器c11。mdcid 161具有其中五个操作支路连接成圆形的圆形配置,并且具有耦接在第一和第四端子之间的第一瞬态支路b21、耦接在第二和第五端子之间的第二瞬态支路b22和耦接在第二和第三端子之间的第三瞬态支路b23。
111.本地控制器c11耦接到(为了清楚起见未示出)第一操作支路b11、第二操作支路b12、第三操作支路b12、第四操作支路b14、第五操作支路b15、第一瞬态支路b21、第二瞬态支路b22和第三瞬态支路b23来控制它们的操作。通过使用单个控制器c11,与传统mdcid 40相比,可以减少控制复杂度,并且可以减少mdcid 161的成本、占用面积和体积。
112.在第一操作支路b11和第二操作支路b12之间的第一端子处发生故障的情况下,本地控制器c11接通第一瞬态支路b21,然后开始相继或同时地关断第一操作支路b11和第二操作支路b12。在完成关断第一操作支路b11和第二操作支路b12时,本地控制器c11关断第一瞬态支路b21。
113.在第二操作支路b12和第三操作支路b13之间的第二端子处发生故障的情况下,本地控制器c11接通第二瞬态支路b22和第三瞬态支路b23中的至少一个,然后开始相继或同时地关断第二操作支路b12和第三操作支路b13。在完成关断第二操作支路b12和第三操作支路b13时,本地控制器c11关断第二瞬态支路b22和第三瞬态支路b23中的至少一个。
114.第三操作支路b13和第四操作支路b14之间的第三端子处发生故障的情况下,本地控制器c11接通第三瞬态支路b23,然后开始相继或同时关断第三操作支路b13和第四操作支路b14。在完成关断第三操作支路b13和第四操作支路b14时,本地控制器c11关断第三瞬态支路b23。尽管此处使用了第三瞬态支路b23,但这仅用于说明,并不暗示对此处描述的主题的范围有任何限制。例如,可以交替采用第二瞬态支路b22和第三瞬态支路b23两者。
115.在第四操作支路b14和第五操作支路b15之间的第四端子处发生故障的情况下,本地控制器c11接通第一瞬态支路b21,然后开始相继或同时地关断第四操作支路b14和第五操作支路b15。在完成关断第四操作支路b14和第五操作支路b15时,本地控制器c11关断第一瞬态支路b21。
116.在第五操作支路b15和第一操作支路b11之间的第五端子处发生故障的情况下,本地控制器c11接通第二瞬态支路b22,然后开始相继或同时地关断第五操作支路b15和第一操作支路b11。在完成关断第五操作支路b15和第一操作支路b11时,本地控制器c11关断第二瞬态支路b22。尽管此处使用了第二瞬态支路b22,但这仅用于说明,并不暗示对此处描述的主题的范围有任何限制。例如,可以交替采用第二瞬态支路b22和第三瞬态支路b23两者。
117.通过图12的配置,瞬态支路可以由不同的操作支路共用。与传统方法相比,这显著减少了成本、体积和占用面积。可以理解,更多端子的mdcid可以类似地减少瞬态支路,只要瞬态支路由操作支路共用即可。例如,对于具有n个操作支路的配置,它可以具有不大于(n+
1)/2的瞬态支路,其中n代表大于2的整数。
118.综上,通过多路复用瞬态支路或与不同的操作支路共用瞬态支路以为操作支路创建临时dc路径,本文中的实施例由于用于控制较少开关的简化控制逻辑可以增加mdcid的可靠性,并且由于使用较少的高成本半导体开关的这一事实,减少了mdcid的成本、体积和占用面积。
119.此外,虽然以特定顺序描述了操作,但这不应被理解为要求按照所示的特定顺序或序列顺序执行这些操作,或者要求执行所有图示的操作来实现期望的结果。在某些情况下,多任务处理和并行处理可能是有利的。同样,虽然上述讨论中包含了若干个特定的实施方案细节,但这些不应被解释为对本公开的范围的限制,而应被解释为对可能是特定于具体实施例的特征的描述。在单独实施例的上下文中描述的某些特征也可以在单个实施例中组合实施。另一方面,在单个实施例的上下文中描述的各种特征也可以在多个实施例中单独地实现或以任何合适的部分组合的方式实现。
120.尽管已经用特定于结构特征和/或方法行为的语言描述了主题,但要理解,所附权利要求中限定的主题不一定限于上述的特定特征或者动作。而是,上述特定特征和行为是作为实施权利要求的示例形式而公开的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1