一种基于三相有源电力滤波器的电流控制方法与流程
[0001]
本发明属于三相有源电力滤波器技术领域,具体为一种基于三相有源电力滤波器的电流控制方法。
背景技术:
[0002]
21世纪以来,国家经济进入高速发展阶段,但同时造成的环境污染和不可再生能源短缺等问题日益加剧。为达到节能减排的目的,因此出现了各类新能源装置,同时对其功率等级也提出了更高的要求。传统的有源电力滤波器电流控制存在效率低,动态性能、鲁棒性差的缺点。
[0003]
传统的重复控制能够对周期性的交流参考信号实现无静差跟踪,为重复控制在apf中的应用提供了理论依据。然而重复控制器内部的时滞环节会使其在一个信号周期后才能对输入信号做出响应,且重复控制对被控对象的数学模型依赖程度较高,当系统元器件老化或存在外部扰动时会影响apf的补偿性能。
[0004]
基于鲁棒控制理论的h
∞
控制在考虑系统鲁棒性问题时,比其他方法更为直接有效,但由于其需要同时兼顾鲁棒性和其他性能指标,控制性能保守,静态特性不理想。
[0005]
因此,有必要设计一种三相有源电力滤波器的电流控制方法,针对有源电力滤波器电流控制存在的问题进行改进,有效改善有源电力滤波器的系统稳定性、动态性能和鲁棒性。
技术实现要素:
[0006]
本发明针对以上提出的问题,结合apf的拓扑结构提出了一种重复-h
∞
复合控制策略,通过h
∞
控制提高系统的鲁棒性,避免了单独重复控制下控制器设计复杂和参数难以选定的缺陷,同时利用重复控制对周期信号的高精度跟踪特性来弥补h
∞
控制的保守性。
[0007]
本发明为实现上述目的,采用如下技术方案:
[0008]
采用重复-h
∞
复合控制策略,具体步骤如下:
[0009]
步骤一:根据有源电力滤波器的拓扑结构分析出其数学模型。
[0010]
步骤二:分析重复控制与h
∞
的控制结构,求出被控对象与重复控制器的标称状态空间矩阵p(s)和m(s)。
[0011]
步骤三:根据步骤二求出的p(s)和m(s)来构建标准h
∞
问题从而求出系统广义空间矩阵
[0012]
步骤四:根据步骤三所求出的和步骤二求出的p(s)和m(s)再结合系统参数求出h
∞
的控制器c(s)。
[0013]
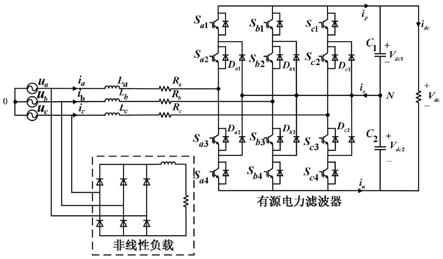
进一步,步骤一中有源电力滤波器主电路拓扑结构选用三电平二极管中点钳位式拓扑,如图1所示,根据基尔霍夫定律再经变换矩阵t
abc/αβ
得到α-β两相静止坐标系下的数学模型为:
[0014][0015]
式中:
[0016][0017]
x
′
=[i
α i
β u
dc1 u
dc2
]
t
[0018]
b
′
=diag[1/l 1/l 1/c 1/c]
[0019]
u
′
=[e
α e
β
ꢀ-
i
dc
ꢀ-
i
dc
]
[0020]
式中,r和l分别为lcl简化后的滤波电感和等效电阻,s
αp
、s
αn
、s
βp
、s
βn
为逆变桥igbt转换到α-β两相静止坐标系下的的开关函数。i
α
、i
β
、e
α
、e
β
分别为α-β两相静止坐标系下电网电流和电网电压,u
dc1
和u
dc2
为直流侧两电容的电压。
[0021]
进一步,步骤二所述的重复控制与h
∞
的控制算法的一般形式如图2所示,结合有源电力滤波器的电流控制可得,电流参考给定值i
ref
和网侧电压e
α
组成系统扰动信号w,e为误差控制信号,p为重复控制器输出,u为补偿器c(s)的输出。根据步骤一求出的数学模型,定义状态变量x=i
α
,系统外部输入w=[i
α*
e
α
]
t
,控制输入u=u
α
,输出稳态误差e=i
α*-i
α
作为p的输出。得到被控对象的标称状态空间矩阵为:
[0022][0023]
式中:a=[r/l];b
1
=[1/l0];b
2
=[-1/l];c=[-1];d
1
=[01];d
2
=[0];
[0024]
基于三相有源电力滤波器的重复-h
∞
复合控制框图如图3所示。图中m(s)由时间常数为τ
d
的延时环节和一阶低通滤波器f(s)组成,为保证系统稳定性和鲁棒性,f(s)表达式为:
[0025][0026]
式中w
c
为截止角频率,得到f(s)的状态空间表达式:
[0027][0028]
式中a
w
=-w
c
,b
w
=w
c
,c
w
=1,d
w
=0。图3中x
f
(t-τ')为m(s)中延时环节的延时输出,x
f
(t)为f(s)的输出,则m(s)的状态空间表达式为:
[0029][0030]
可得到重复控制器的标称状态空间矩阵为:
[0031][0032]
进一步,步骤三中所述的标准h
∞
问题结构图如图4所示,将重复控制器中的延时输出x
f
(t-τ')作为不确定性扰动v,把延时模块的输入b和输出a添加为新模型的输入和输出,y(s)和控制器输出信号u
α
看做系统的评价输出,引入权重系数ξ和μ调整所设计控制器的性
能,从而求解出系统广义空间矩阵
[0033]
由图4得到h
∞
标准问题下系统输入和输出关系:
[0034][0035]
根据步骤一求出的基于三电平二极管中点钳位型有源电力滤波器的α-β两相静止坐标系下的数学模型以及所步骤二求出的被控对象与重复控制器的标称状态空间矩阵p(s)和m(s)可得到系统广义空间矩阵
[0036][0037]
进一步,步骤四所述的控制器c(s)可由步骤二求得的被控对象与重复控制器的标称状态空间矩阵p(s)和m(s)以及步骤三求得的系统广义空间矩阵再结合系统参数求出,网侧等效电阻取r=0.01ω,网侧滤波电感取l=5mh,低通滤波器截止频率为w
c
=1khz,利用matlab/robust-toolbox中的hinflmi函数求得控制器c(s):
[0038][0039]
将其离散化得到:
[0040][0041]
z是z域算子,是离散化的形式。
[0042]
有益效果:本发明针对传统apf设备控制品质的不足,结合传统重复控制与h
∞
控制思想,构造了重复-h
∞
复合控制器,将重复控制中的延时环节看作系统的外部扰动,构建出系统广义空间模型,求出最优h
∞
控制器。本发明所提出的重复-h
∞
复合控制与传统重复控制相比,表现出较好的静动态特性,且具有良好的鲁棒性。
附图说明
[0043]
为了使本发明的目的、技术方案和有益效果更加清楚,本发明提供如下附图进行说明:
[0044]
图1为本发明所用的有源电力滤波器主电路拓扑结构图。
[0045]
图2为重复-h
∞
复合控制算法的一般形式图。
[0046]
图3为有源电力滤波器电流重复-h
∞
控制框图。
[0047]
图4为标准h
∞
控制问题结构图。
具体实施方式
[0048]
本发明提出了一种重复-h
∞
复和控制策略,具体实施方式如下:
[0049]
步骤一:根据有源电力滤波器的拓扑结构分析出其数学模型。
[0050]
有源电力滤波器主电路拓扑结构选用三电平二极管中点钳位式拓扑,如图1所示,根据基尔霍夫定律再经变换矩阵t
abc/αβ
得到α-β两相静止坐标系下的数学模型为:
[0051][0052]
式中:
[0053][0054]
x
′
=[i
α i
β u
dc1 u
dc2
]
t
[0055]
b
′
=diag[1/l 1/l 1/c 1/c]
[0056]
u
′
=[e
α e
β
ꢀ-
i
dc
ꢀ-
i
dc
]
[0057]
步骤二:分析重复控制与h
∞
的控制结构,求出被控对象与重复控制器的标称状态空间矩阵p(s)和m(s)。
[0058]
重复控制与h
∞
的控制算法的一般形式如图2所示,结合有源电力滤波器的电流控制可得,电流参考给定值i
ref
和网侧电压e
α
组成系统扰动信号w,e为误差控制信号,p为重复控制器输出,u为补偿器c(s)的输出。根据步骤一求出的数学模型,定义状态变量x=i
α
,系统外部输入w=[i
α* e
α
]
t
,控制输入u=u
α
,输出稳态误差e=i
α*-i
α
作为p的输出。得到被控对象的标称状态空间矩阵为:
[0059][0060]
式中:a=[r/l];b
1
=[1/l0];b
2
=[-1/l];c=[-1];d
1
=[01];d
2
=[0];
[0061]
基于三相有源电力滤波器的重复-h
∞
复合控制框图如图3所示。图中m(s)由时间常数为τ
d
的延时环节和一阶低通滤波器f(s)组成,为保证系统稳定性和鲁棒性,f(s)表达式为:
[0062][0063]
式中w
c
为截止角频率,得到f(s)的状态空间表达式:
[0064][0065]
式中a
w
=-w
c
,b
w
=w
c
,c
w
=1,d
w
=0。图3中x
f
(t-τ')为m(s)中延时环节的延时输出,x
f
(t)为f(s)的输出,则m(s)的状态空间表达式为:
[0066][0067]
可得到重复控制器的标称状态空间矩阵为:
[0068][0069]
步骤三:根据步骤二求出的p(s)和m(s)来构建标准h
∞
问题从而求出系统广义空间
矩阵
[0070]
标准h
∞
问题结构图如图4所示,将重复控制器中的延时输出x
f
(t-τ')作为不确定性扰动v,把延时模块的输入b和输出a添加为新模型的输入和输出,y(s)和控制器输出信号u
α
看做系统的评价输出,引入权重系数ξ和μ调整所设计控制器的性能,从而求解出系统广义空间矩阵
[0071]
由图4得到h
∞
标准问题下系统输入和输出关系:
[0072][0073]
根据步骤一求出的基于三电平二极管中点钳位型有源电力滤波器的α-β两相静止坐标系下的数学模型以及所步骤二求出的被控对象与重复控制器的标称状态空间矩阵p(s)和m(s)可得到系统广义空间矩阵
[0074][0075]
步骤四:根据步骤三所求出的和步骤二求出的p(s)和m(s)再结合系统参数求出h
∞
的控制器c(s)。
[0076]
控制器c(s)可由步骤二求得的被控对象与重复控制器的标称状态空间矩阵p(s)和m(s)以及步骤三求得的系统广义空间矩阵再结合系统参数求出,网侧等效电阻取r=0.01ω,网侧滤波电感取l=5mh,低通滤波器截止频率为w
c
=1khz,利用matlab/robust-toolbox中的hinflmi函数求得控制器c(s):
[0077][0078]
将其离散化得到:
[0079][0080]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管通过以上实例已经对本发明进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其做出各种各样的改变,二不偏离本发明权利要求书所限定范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1