马达控制装置和马达控制方法与流程
1.本发明涉及对电动马达进行驱动控制的马达控制装置和马达控制方法。
背景技术:
2.在用于产业设备、家电、电动汽车、混合动力车辆等各种领域的马达中,以往在控制输出扭矩时进行马达扭矩推断。这样的马达扭矩的推断方法能够大致分为外积法和能量法。
3.外积法是根据磁通与电流之积来推断马达扭矩的方法。例如,在专利文献1中,如式(1)所示,根据磁通与电流(idc,iqc)之积来推断马达扭矩^t(t帽(hat))。
[0004][0005]
在专利文献2的马达控制装置中,如式(2)所示,使用通过马达输出(p
in
与p
loss
之差)除以马达转速(ωm)来推断扭矩的方法(能量法)。在式(2)中,p
in
是马达输入电力,p
loss
是马达损耗。
[0006][0007]
另一方面,非专利文献1提出了组合外积法和能量法来推断扭矩的方法。
[0008]
现有技术文献
[0009]
专利文献
[0010]
专利文献1:日本再公表wo2010/116815
[0011]
专利文献2:日本特开2016-187250号公报
[0012]
非专利文献
[0013]
非专利文献1:比田一、富坚仁夫、上山健司、井上征则、森木茂雄:《考虑了永磁铁同步马达的空间高次谐波的新的扭矩推断方法和扭矩波动降低》电气学会论文杂志d,2010年130卷9号,p.151-1058
技术实现要素:
[0014]
发明要解决的课题
[0015]
非专利文献1虽然示出了兼用能量法和外积法甚至能够推断瞬时的扭矩波动,但尽管使用了外积法,但是假定电流和磁通具有线性。此外,在非专利文献1中,取通过能量法和外积法这两种方法得到的扭矩推断值的算术平均,因此存在没有活用能量法和外积法的各方式的特征的问题。
[0016]
本发明是鉴于上述课题而完成的,其目的在于,在马达控制装置中,在低输出时和高输出时的整个区域进行高精度的扭矩推断。
[0017]
用于解决课题的手段
[0018]
作为达成上述目的并解决上述课题的一个手段,具有以下结构。即,本技术的例示
的第1发明是一种马达控制装置,其对电动马达进行驱动,其特征在于,该马达控制装置具有:第1扭矩推断部,其至少根据线圈交链磁通和马达电流来求取第1扭矩推断值;第2扭矩推断部,其至少根据马达输入电力和马达转速来求取第2扭矩推断值;以及加权调整部,其根据规定的条件来调整所述第1扭矩推断值和所述第2扭矩推断值各自的加权而计算所述电动马达的扭矩推断值。
[0019]
本技术例示的第2发明是一种电动助力转向装置,其对车辆等的驾驶员的方向盘操作进行辅助,其特征在于,该电动助力转向装置具有:电动马达,其辅助所述驾驶员的操舵;以及通过上述例示的第1发明的马达控制装置对所述电动马达进行驱动控制的单元。
[0020]
本技术例示的第3发明是一种电动助力转向系统,其具有上述例示的第2发明的电动助力转向用马达控制装置。
[0021]
本技术例示的第4发明是一种电动汽车,其具有电动马达作为动力源,其中,该电动汽车具有通过上述例示的第1发明的马达控制装置对所述电动马达进行驱动控制的单元。
[0022]
本技术例示的第5发明是一种混合动力汽车,其具有电动马达和内燃机作为动力源,其中,该混合动力汽车具有通过上述例示的第1发明的马达控制装置对所述电动马达进行驱动控制的单元。
[0023]
本技术例示的第6发明是一种马达控制方法,其对电动马达进行驱动,其中,该马达控制方法包含以下工序:第1扭矩推断工序,至少根据线圈交链磁通和马达电流来求取第1扭矩推断值;第2扭矩推断工序,至少根据马达输入电力和马达转速来求取第2扭矩推断值;以及加权调整工序,其根据规定的条件来调整所述第1扭矩推断值和所述第2扭矩推断值各自的加权而计算所述电动马达的扭矩推断值。
[0024]
发明效果
[0025]
根据本发明,根据规定的条件来调整活用了外积法和能量法的各方式的特征的扭矩推断值的加权,由此能够在低输出时和高输出时的整个区域提高扭矩推断精度。
附图说明
[0026]
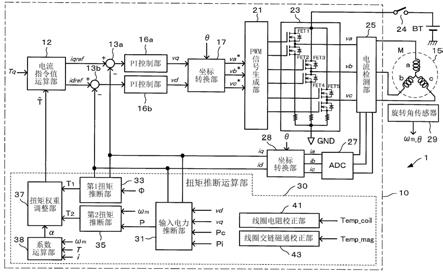
图1是示出本发明的实施方式的马达控制装置的整体结构的框图。
[0027]
图2是示出实施方式的马达控制装置中的马达的驱动和控制(动作例)的流程图。
[0028]
图3是示出扭矩的权重调整效果的动作点的图。
[0029]
图4是示出用于确认扭矩的权重调整效果的电动马达的加速和旋转状态的图。
[0030]
图5是示出调整后的扭矩的权重的图。
[0031]
图6是示出基于外积法的以往的扭矩推断结果的图。
[0032]
图7是示出基于能量法的以往的扭矩推断结果的图。
[0033]
图8是示出本实施方式的马达控制装置的扭矩推断结果的图。
具体实施方式
[0034]
以下,参照附图对本发明的实施方式进行详细说明。图1是示出本发明的实施方式的马达控制装置的整体结构的框图。
[0035]
图1所示的马达控制装置1具有作为电动马达15的驱动控制部而发挥功能的马达
控制部10,该电动马达15例如是3相无刷dc马达。马达控制部10构成为包含扭矩推断运算部30、电流指令值运算部12、pwm信号生成部21、外部电池bt、逆变器23等。
[0036]
逆变器23是利用经由电源继电器24从电池bt提供的电力来生成用于驱动电动马达15的交流的马达驱动电路。电源继电器24构成为能够切断来自电池bt的电力,也可以由半导体继电器构成。
[0037]
pwm信号生成部21按照后述的电压指令值,生成构成逆变器23的多个半导体开关元件(fet 1~fet 6)的接通/断开控制信号(pwm信号)。这些半导体开关元件与电动马达15的各相(a相、b相、c相)对应。
[0038]
开关元件(fet)也被称为功率元件,例如使用mosfet(metal-oxide semiconductor field-effect transistor:金属氧化物半导体场效应晶体管)、igbt(insulated gate bipolar transistor:绝缘栅双极型晶体管)等开关元件。
[0039]
从作为马达驱动电路的逆变器23向电动马达15提供的马达驱动电流由电流检测部25检测,该电流检测部25由与各相对应配置的电流传感器(未图示)构成。电流检测部25使用由运算放大器等构成的放大电路来检测在马达驱动电流检测用的分流电阻中流动的直流电流。
[0040]
来自电流检测部25的输出信号(电流检测信号)输入给a/d转换部(adc)27。adc 27通过a/d转换功能而将模拟电流值转换为数字值,并将通过该转换取得的3相电流ia、ib、ic输入给坐标转换部28。
[0041]
坐标转换部28具有3相/2相转换功能,根据3相电流ia、ib、ic以及由旋转角传感器29检测到的旋转角度θ来运算d轴上的电流id和q轴上的电流iq。即,坐标转换部28根据实际电流来运算d轴电流和q轴电流。
[0042]
扭矩推断运算部30具有第1扭矩推断部33、第2扭矩推断部35、扭矩权重调整部(权重调整部)37等。扭矩权重调整部37调整从第1扭矩推断部33输出的第1扭矩推断值和从第2扭矩推断部35输出的第2扭矩推断值各自的权重。
[0043]
扭矩权重调整部37通过下述的式(3)来调整电动马达15的扭矩推断值^t(t帽)。在式(3)中,t1是第1扭矩推断值,t2是第2扭矩推断值,α(0≤α≤1)是加权调整系数。
[0044][0045]
第1扭矩推断值t1用以下的式(4)表示。式(4)是基于外积法的运算式。
[0046]
t1=n
pp
{φiq+(l
d-lq)idiq}
…ꢀꢀ
(4)
[0047]
在式(4)中,n
pp
是马达的极对数,ld、lq是旋转矢量坐标系中的马达电感,φ是线圈交链磁通,id、iq是马达电流。
[0048]
第2扭矩推断值t2用下述的式(5)表示。式(5)是基于能量法的运算式,p是马达输入电力,ωm是马达转速。
[0049]
t2=p/ωm…ꢀꢀ
(5)
[0050]
马达输入电力p是在输入电力推断部31中使用下述的式(6)来推断的。
[0051]
p=vdid+v
qiq-p
c-pi…ꢀꢀ
(6)
[0052]
在式(6)中,vd、vq是旋转矢量坐标系中的马达的施加电压,pc是铜损,pi是铜损以外的损耗(例如铁损、轴损等)。
[0053]
铜损pc是在未图示的铜损推断部中使用以下的式(7)来推断的。
[0054]
pc=r(i
d2
+i
q2
)
…ꢀꢀ
(7)
[0055]
在式(7)中,r是电动马达15的线圈电阻值。由此,基于推断马达的输入电力和铜损的结果,能够提高马达扭矩的推断精度。
[0056]
另外,对于电动马达15的线圈电阻值,也可以设置检测线圈温度的单元,在线圈电阻校正部41中使用该线圈温度(temp_coil)来校正线圈电阻。这样,通过根据马达线圈温度来校正线圈电阻,能够提高马达扭矩的推断精度。
[0057]
而且,也可以在电动马达15的转子设置检测磁铁的磁铁温度的单元,在线圈交链磁通校正部43中使用所取得的磁铁温度(temp_mag)来校正电动马达15的线圈交链磁通。这样,通过根据马达磁铁温度来校正线圈交链磁通,能够提高马达扭矩的推断精度。
[0058]
接下来,对本实施方式的马达控制装置的扭矩推断中的加权的调整系数进行说明。在上述的式(3)(也称为扭矩推断式)中,加权调整系数α是调整第1扭矩推断值t1和第2扭矩推断值t2的比例的系数,也称为扭矩权重。
[0059]
系数运算部38根据规定的输入,通过几种方法来计算加权调整系数α。例如,作为第1方法,如下述的式(8)所示那样计算与电动马达15的输出之比(比例)相应的加权系数α。
[0060][0061]
在式(8)中,t
max
是马达输出的最大值,ω
m_max
是马达转速的最大值。
[0062]
扭矩权重调整部37在求取扭矩推断值^t(t帽)的式(3)中,使用通过式(8)根据电动马达15的输出功率计算出的加权系数α,来调整第1扭矩推断值t1和第2扭矩推断值t2的权重。这样,能够进行从低速到高速的整个区域的马达扭矩推断。
[0063]
作为第2方法,系数运算部38如下述的式(9)所示那样计算与电动马达15的转速之比相应的加权系数α。
[0064][0065]
扭矩权重调整部37使用根据电动马达15的转速计算出的加权系数α而在求取扭矩推断值^t(t帽)的式(3)中调整第1扭矩推断值t1和第2扭矩推断值t2的权重。
[0066]
根据式(3),按照使得在马达低速旋转时加权系数α变小的方式进行调整,能够进行活用了外积法的特征的扭矩推断,按照使得在高速旋转时加权系数α变大的方式进行调整,能够进行活用了能量法的特征的扭矩推断。
[0067]
由此,通过进行基于与电动马达的转速相应的加权系数α的加权调整,能够在从低速到高速的整个区域进行马达扭矩推断。
[0068]
计算加权调整系数α的第3方法使用下述的式(10),根据在电动马达15的线圈中流动的电流之比来计算加权系数α。式(10)的i
max
是马达电流的最大值。
[0069][0070]
扭矩加权调整部37计算与在电动马达15的线圈中流动的电流相应的加权系数α,使用该加权系数α来进行第1扭矩推断值t1和第2扭矩推断值t2的加权调整。通过进行基于与
电动马达的线圈电流相应的加权系数α的加权调整,能够进行从低速到高速的整个区域的马达扭矩推断。
[0071]
电流指令值运算部12求取从外部输入的指示扭矩tq与由扭矩权重调整部37调整后的扭矩推断值^t(t帽)之差(扭矩偏差),针对该差进行比例积分控制(pi控制)。根据在pi控制中取得的扭矩值来进行规定的电流指令计算,由此求取作为磁场分量的d轴指令电流id
ref
和作为扭矩分量的q轴指令电流iq
ref
。
[0072]
在减法器13a中,运算q轴指令电流iq
ref
与q轴电流iq之差(设为dq),通过减法器13b来运算d轴指令电流id
ref
与d轴电流id之差(设为dd)。
[0073]
上述的差dq输入给pi控制部16a,差dd输入给pi控制部16b。pi控制部16a按照使dq收敛于零的方式进行pi(比例+积分)控制,计算作为q轴电压的指令值的q轴电压指令值vq。pi控制部16b按照使dd收敛于零的方式进行pi(比例+积分)控制,由此计算作为d轴电压的指令值的d轴电压指令值vd。
[0074]
这样,作为电流控制部的pi控制部16a、16b按照使d轴和q轴的电流指令值与检测电流值之差为零的方式求取d轴和q轴的电压指令值。坐标转换部17根据这些电压指令值vq、vd以及电动马达15的旋转角度来运算马达施加电压。
[0075]
即,q轴电压指令值vq和d轴电压指令值vd输入给具有2相/3相转换功能的坐标转换部17,坐标转换部17根据旋转角度θ,将vq、vd转换为3相的各相的电压指令值即电压指令值va
*
、vb
*
、vc
*
。转换后的电压指令值va
*
、vb
*
、vc
*
输入给pwm信号生成部21。pwm信号生成部21根据这些电流指令值来生成电动马达15的驱动信号(pwm信号)。
[0076]
接下来,对本实施方式的马达控制装置对马达的驱动和控制方法进行说明。图2是示出本实施方式的马达控制装置对马达的驱动和控制(动作例)的流程图。
[0077]
在图2的步骤s11中,根据由旋转角传感器29检测到的电角度(旋转角度)θ来计算电动马达15的角速度ω。在步骤s13中,检测马达电流。这里,如上所述,由adc 27对来自电流检测部25的电流检测信号进行a/d转换而取得作为数字值的3相电流ia、ib、ic。
[0078]
在步骤s15中,在坐标转换部28中进行3相/2相转换、旋转坐标转换,由此根据在步骤s11中检测到的旋转角度θ和在步骤s13中取得的3相电流ia、ib、ic来运算d轴上的电流id和q轴上的电流iq(反馈电流)。
[0079]
在步骤s17中,输入电力推断部31使用上述的式(6)来推断马达输入电力p。在接下来的步骤s19中,第1扭矩推断部33通过上述的式(4)来运算第1扭矩推断值t1。在步骤s21中,第2扭矩推断部35使用上述的式(5)来运算第2扭矩推断值t2。
[0080]
即,在步骤s19中,根据线圈交链磁通、马达电流等来求取第1扭矩推断值,在步骤s21中,根据马达输入电力、马达转速等来求取第2扭矩推断值。
[0081]
在步骤s23中,系数运算单元38计算加权调整系数α。系数运算部38使用上述的第1方法、第2方法以及第3方法中的任意方法来计算加权调整系数α。这里,例如,可以固定使用任意方法,或者也可以根据电动马达15的驱动状态等来适当选择。
[0082]
在步骤s25中,扭矩权重调整部37分别针对在上述的步骤s19、s21中取得的第1扭矩推断值t1和第2扭矩推断值t2,根据在步骤s23中计算出的加权调整系数α,通过上述的式(3)来调整扭矩的权重而计算扭矩推断值^t(t帽)。
[0083]
在步骤s25的扭矩的权重调整中,在例如使用上述的式(9)所示的系数作为加权调
整系数α的情况下,马达输出越大,式(3)的扭矩推断值^t(t帽)中的基于能量法的扭矩推断值t2的比例越大。其结果为,能够减小马达的高输出区域中的由磁饱和引起的扭矩推断误差。
[0084]
在使用上述的式(8)或式(9)所示的系数作为加权调整系数α的情况下,在使用式(3)来计算扭矩推断值时,通过乘法运算能够消去马达转速ωm,能够避免马达转速的除法运算而简化计算,并且能够进行整个区域的扭矩推断。
[0085]
在步骤s27中,运算q轴和d轴的电流指令值和电压指令值。具体而言,在电流指令值运算部12中,根据指示扭矩tq与扭矩推断值^t(t帽)之差来进行电流指令运算,运算q轴和d轴的电流指令值。
[0086]
在运算d轴和q轴指令电流之后,针对q轴指令电流iq
ref
与q轴电流iq之差进行pi控制,计算作为q轴电压的指令值的q轴电压指令值vq。并且,针对d轴指令电流id
ref
与d轴电流id之差进行pi控制,计算作为d轴电压的指令值的d轴电压指令值vd。
[0087]
在步骤s29中,根据旋转角度θ以及通过坐标转换部17的2相/3相转换在上述步骤s27中运算出的q轴电压指令值vq和d轴电压指令值vd来求取作为3相的各相的电压指令值的电压指令值va
*
、vb
*
、vc
*
。
[0088]
在步骤s31中,将在步骤s29中求出的3相的各相的电压指令值va
*
、vb
*
、vc
*
输入给pwm信号生成部21。pwm信号生成部21根据这些电流指令值而生成电动马达15的驱动信号(pwm信号)。
[0089]
接下来,对本实施方式的马达控制装置的扭矩的权重调整效果进行说明。图3示出了扭矩的权重调整效果的动作点。这里,如图4所示,假定使电动马达从停止状态加速,以500rpm的恒定转速旋转。
[0090]
图5示出了调整后的扭矩的权重。图5的扭矩的权重是基于通过上述的式(8)计算出的加权系数α进行加权的例子。
[0091]
因此,关于扭矩的权重调整的效果,对比现有的扭矩权重调整和本实施方式的马达控制装置的扭矩的权重调整来进行说明。图6是上述的通过外积法来推断扭矩的现有例的结果,图7示出了通过能量法来推断扭矩的现有例的结果。
[0092]
另一方面,图8是本实施方式的马达控制装置的扭矩的推断结果。对比图6和图8可知,与基于外积法的以往的扭矩推断相比,本实施方式的马达控制装置的扭矩推断的扭矩推断误差极小。
[0093]
对比图7和图8可知,本实施方式的马达控制装置的扭矩推断与基于能量法的以往的扭矩推断相比,0速(0.5秒)的扭矩推断误差小。
[0094]
这是因为,在图7所示的基于能量法的以往的扭矩推断中,如标号a所示,在开始旋转时(0速附近),推断误差急剧增加,扭矩推断变得不稳定,但在本实施方式的马达控制装置的扭矩推断的情况下,如图8所示,在开始旋转时也不会产生推断误差。
[0095]
本实施方式的马达控制装置例如能够搭载于电动泵、家电产品、各种产业设备、电动助力转向装置等。例如在搭载于电动助力转向装置的情况下,在马达控制装置的马达驱动控制中,扭矩推断误差变小,能够高精度地推断操舵辅助中的操舵扭矩。同时,利用由电动马达产生的扭矩来辅助与方向盘连接的旋转轴的旋转,由此辅助驾驶员的方向盘操作。
[0096]
并且,能够将上述的电动助力转向装置搭载于电动助力转向系统。在该情况下也
是,在马达控制装置的马达驱动控制中扭矩推断误差变小,能够在电动助力转向系统的操舵辅助中高精度地推断操舵扭矩。
[0097]
另外,也能够将本实施方式的马达控制装置搭载于以电动马达作为驱动源的例如电动汽车(electric vehicle:ev)、混合动力汽车等车辆。在该情况下,在车辆低速行驶时和高速行驶时这两种情况下,都能够减小作为动力源的电动马达的扭矩推断误差。
[0098]
如以上所说明的那样,本实施方式的马达控制装置对在第1扭矩推断部中通过外积法推断出的第1扭矩推断值和在第2扭矩推断部中通过能量法推断出的第2扭矩推断值这两种扭矩推断值分别进行基于根据规定的条件计算出的加权系数α的加权调整。
[0099]
通过兼用这样的不同的2种扭矩推断方法,进行针对计算出的各个扭矩推断值的加权调整,能够在电动马达的低输出区域和高输出区域这两个动作区域中求取精度高的马达扭矩推断值。
[0100]
其结果为,在马达控制装置中,例如,在马达的低输出时(低速时)进行活用了外积法的特征的扭矩推断,在马达的高输出时(高速时)进行活用了能量法的特征的扭矩推断,由此能够进行活用了外积法和能量法各自的特征的扭矩推断。
[0101]
因此,在马达控制装置中,根据基于扭矩推断值运算出的电流指令值、电压指令值来生成脉冲宽度调制(pwm)信号,根据该脉冲宽度调制(pwm)信号来控制逆变器电路,由此能够根据推断精度提高的扭矩推断值来进行马达的逆变器控制。
[0102]
标号说明
[0103]
1:马达控制装置;10:马达控制部;12:电流指令值运算部;15:电动马达;16a、16b:pi控制部;17、28:坐标转换部;21:pwm信号生成部;23:逆变器;24:电源继电器;25:电流检测部;27:a/d转换部(adc);29:旋转角传感器;30:扭矩推断运算部;31:输入电力推断部;33:第1扭矩推断部;35:第2扭矩推断部;37:扭矩权重调整部(加权调整部);38:系数运算部;bt:外部电池。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1