基于逆变器死区补偿的永磁同步电机在线参数辨识方法
1.本发明涉及永磁同步电机的参数辨识技术领域,具体是一种基于逆变器死区补偿的永磁同步电机在线参数辨识方法。
背景技术:
2.永磁同步电动机(pmsm)由于自身结构简单,具有转速平稳、动态响应快、过载能力强、可靠性高、结构多样化、应用范围广等优点,已成为研究热点,并得到广泛的应用。
3.永磁同步电机常用的控制策略为矢量控制和直接转矩控制。矢量控制的方法主要有:i
d
=0控制、最大转矩电流比控制、弱磁控制。矢量控制主要是采用双闭环控制,其中的电流环和转速环的设计是采用基于线性系统理论的pi控制,对电机参数的变化敏感。而且在实际应用中,针对不同厂商生产的电机,需要控制器能够辨识所需参数实现良好控制性能。同时,在电动汽车应用中,电机驱动系统的可靠运行有严格的要求,需要进行故障的早期诊断。故障的在线监控能够通过对电机参数进行辨识来实现,使得参数辨识成为早期故障诊断的重要方法之一。综上所诉,pmsm的参数辨识可以实现控制器的参数整定及早期的故障诊断,能够提高控制器控制准确和可靠运行,具有重要的理论研究意义。pmsm需要辨识的电磁参数为:r
s
、l
d
、l
q
和ψ
f
。影响电机参数的主要因素是温度变化和磁路饱和。在线参数辨识是根据电机的输入输出数据,采用不同的算法辨识出电机参数,并且不断根据新的数据对参数进行更新。跟离线辨识方法相比,在线参数辨识可以对运行状态实时监控,同时参数的实时更新可以增强控制器的自适应控制。目前参数在线辨识的辨识算法主要有:递推最小二乘法、模型参考自适应、扩展卡尔曼滤波以及智能算法等。
4.同时,在参数辨识过程中逆变器死区时间的存在对于参数辨识结果产生较严重的负面影响,如何补偿逆变器死区时间,提高辨识结果的精度也是当今研究的热点。在参数辨识中,逆变器死区时间造成的非线性将对估计转子信息带来较严重的影响,特别是低速、轻载情况时,由于相电流较小而大部分时间处于零电流钳位区从而导致较严重的非线性电压误差,影响参数辨识的精度。故在永磁同步电机参数辨识的同时需要考虑逆变器死区时间造成的逆变器非线性的影响。
技术实现要素:
5.本发明的目的在于提供基于逆变器死区补偿的永磁同步电机在线参数辨识方法,通过启动转速环执行速率即以低执行速率的最小二乘法辨识出的定子电阻,转子磁链,有效地辨识出定子电阻和转子磁链;采用两种不同执行速率的最小二乘法实现对电机的定子电阻,d轴电感,q轴电感,转子磁链四个参数的同时在线辨识,解决电压方程欠秩问题,提高辨识精度。
6.本发明的目的可以通过以下技术方案实现:
7.基于逆变器死区补偿的永磁同步电机在线参数辨识方法,参数辨识方法包括以下步骤:
8.s1:在永磁同步电机的矢量控制的基础上,对逆变器非线性进行研究,考虑逆变器死区时间对参数辨识的影响并针对死区时间带来的误差电压进行在线死区补偿;
9.s2:在死区补偿的基础上采用电流环执行速率即以快执行速率的最小二乘法进行在线辨识,辨识d轴电感和q轴电感;
10.s3:在死区补偿的基础上采用转速环执行速率即以低执行速率的最小二乘法进行在线辨识,辨识d轴电感和q轴电感,定子电阻,转子磁链。
11.进一步的,所述死区补偿算法在svpwm的调制方式中实现,根据电流方向,补偿开关管的每个周期开通的时间。
12.进一步的,所述永磁同步电机的电压方程为:
[0013][0014]
在电机稳态运行时,使用此算法,不考虑微分项后的电压方程为:
[0015][0016]
进一步的,所述电阻和磁链的变化比电感的变化要慢,采用转速环执行速率即以低执行速率的最小二乘法进行在线辨识,辨识d轴电感和q轴电感,定子电阻,转子磁链,采用转速环执行速率即以低执行速率的最小二乘法进行在线辨识d轴电感和q轴电感动态响应比较慢,不使用这两个辨识出来的值。
[0017]
进一步的,在d轴注入扰动波形,扰动波形对转矩没有造成波动,使电机运行在超过一个稳定工作点,从而构造满秩的电压方程。
[0018]
进一步的,采用转速环执行速率即以低执行速率的最小二乘法进行在线辨识,辨识定子电阻,转子磁链作为采用电流环执行速率即以快执行速率最小二乘法的输入量,这样快速辨识最小二乘算法只有两个未知量,即d轴电感和q轴电感。
[0019]
进一步的,所述扰动波形为梯形波,其扰动量注入幅值为额定电流幅值3%
‑
5%。
[0020]
本发明的有益效果:
[0021]
1、本发明参数辨识方法通过启动转速环执行速率即以低执行速率的最小二乘法辨识出的定子电阻,转子磁链,有效地辨识出定子电阻和转子磁链;
[0022]
2、本发明参数辨识方法采用两种不同执行速率的最小二乘法实现对电机的定子电阻,d轴电感,q轴电感,转子磁链四个参数的同时在线辨识,解决电压方程欠秩问题,提高辨识精度。
附图说明
[0023]
下面结合附图对本发明作进一步的说明。
[0024]
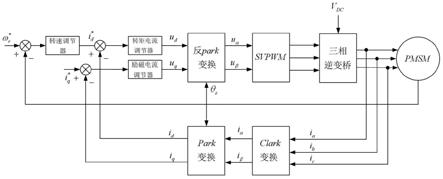
图1是本发明永磁同步电机在线参数辨识总体结构示意图;
[0025]
图2是本发明永磁同步电机在线参数辨识三相逆变桥u相驱动信号图;
[0026]
图3是本发明永磁同步电机在线参数辨识实际电路图;
[0027]
图4是本发明永磁同步电机在线参数辨识最小二乘算法参数辨识系统框图;
[0028]
图5是本发明永磁同步电机在线参数辨识q轴电感的辨识波形图;
[0029]
图6是本发明永磁同步电机在线参数辨识d轴电感的辨识波形图;
[0030]
图7是本发明永磁同步电机在线参数辨识定子电阻的辨识波形图;
[0031]
图8是本发明永磁同步电机在线参数辨识转子磁链的辨识波形图。
具体实施方式
[0032]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0033]
参见图1,基于逆变器死区补偿的永磁同步电机在线参数辨识方法,本发明包括以下步骤:
[0034]
s1:在永磁同步电机的矢量控制的基础上,对逆变器非线性进行研究,考虑逆变器死区时间对参数辨识的影响并针对死区时间带来的误差电压进行在线死区补偿;
[0035]
s2:在死区补偿的基础上采用电流环执行速率即以快执行速率的最小二乘法进行在线辨识,辨识d轴电感和q轴电感;
[0036]
s3:在死区补偿的基础上采用转速环执行速率即以低执行速率的最小二乘法进行在线辨识,辨识d轴电感和q轴电感,定子电阻,转子磁链。
[0037]
如图1所示,永磁同步电机的矢量控制是把交流电机当成直流电机来控制,即模拟直流电机的控制特点进行永磁同步电机的控制。对永磁同步电机的数学模型具体如下公式:
[0038]
在基于转子磁场定向两相同步旋转坐标系中,定子电压方程为:
[0039][0040]
公式(1)中:u
d
和u
q
分别表示定子电压在d轴(直轴)和q轴(交轴)的分量,i
d
和i
q
分别表示定子电流在d轴和q轴的分量;r为电机给定的定子电阻,l
d
和l
q
分别表示电机直轴电感和交轴电感;ω
e
为电机电角速度;ψ
f
为永磁体磁链。
[0041]
如果考虑电流微分项,dt取值过大会降低算法的执行速率,dt取值过小,即使在稳态情况下,若采样电流有微小误差,会导致电流微分项比较大,造成算法不收敛。所以通常情况下,在电机稳态运行时,使用此算法,不考虑微分项后的电压方程为:
[0042][0043]
根据公式(2)可得出公式(3)
[0044][0045]
根据公式(3)可以采用电流环执行速率即以快执行速率的最小二乘法进行在线辨识,辨识d轴电感和q轴电感。
[0046][0047]
根据公式(4)可以采用转速环执行速率即以低执行速率的最小二乘法进行在线辨识,辨识d轴电感和q轴电感,定子电阻,转子磁链。
[0048]
电阻和磁链的变化主要受温度影响,而电感的变化受磁路饱和的影响,即受电流变化的影响,可以认为电阻和磁链的变化比电感的变化要慢,所以采用转速环执行速率即以低执行速率的最小二乘法进行在线辨识,辨识d轴电感和q轴电感,定子电阻,转子磁链在实际中是可行的,且采用转速环执行速率即以低执行速率的最小二乘法进行在线辨识d轴电感和q轴电感动态响应比较慢,所以不使用这两个辨识出来的值。
[0049]
采用转速环执行速率即以低执行速率的最小二乘法进行在线辨识,辨识d轴电感和q轴电感,定子电阻,转子磁链存在欠秩问题,解决办法之一是在d轴注入一个小扰动,这基本不会对转矩造成波动,这会使电机运行在超过一个稳定工作点,从而构造满秩的电压方程。
[0050]
采用转速环执行速率即以低执行速率的最小二乘法进行在线辨识,辨识定子电阻,转子磁链作为采用电流环执行速率即以快执行速率最小二乘法的输入量,这样快速辨识最小二乘算法只有两个未知量,即d轴电感和q轴电感。
[0051]
注入的扰动波形需要满足几个特点,第一点:扰动量的幅值为额定电流幅值的3%到5%,扰动量不能大于额定电流幅值的10%,以免对系统稳定性造成影响,扰动量也不能小于额定电流幅值的1%,以免控制器捕捉不到运行点的变化;第二点:扰动量不能突变过以免造成电流波形的突变,造成电流微分项的量纲不能超过电流量纲使算法失效;第三点:扰动量不能连续变化造成电机运行点时刻发生变化,会引起算法不收敛;综合以上几点,扰动量注入幅值为额定电流幅值3%
‑
5%的梯形波。
[0052]
如图5,6所示,0.2s后,电机运行进入稳态,启动电流环执行速率即以快执行速率的最小二乘法进行在线辨识,辨识d轴电感和q轴电感。输入的定子电阻和转子磁链在0.8s之前采用离线辨识的结果,在0.8s之后采用转速环执行速率即以低执行速率的最小二乘法辨识出的定子电阻,转子磁链。从波形图可以看出,上述方法可以有效地辨识出d轴电感和q轴电感。
[0053]
如图7,8所示,0.8s以后启动转速环执行速率即以低执行速率的最小二乘法辨识出的定子电阻,转子磁链,从波形图可以看出,上述方法可以有效地辨识出定子电阻和转子磁链。
[0054]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施
例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0055]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1