电动汽车永磁同步电机单电流弱磁轨迹控制方法与流程
1.本发明涉及电动汽车永磁同步电机弱磁控制技术领域,尤其涉及一种电动汽车永磁同步电机单电流弱磁轨迹控制方法。
背景技术:
2.目前,现有电动汽车永磁同步电机控制,普遍选择双电流弱磁控制技术,其中对于负i
ds
补偿法无法实现深度弱磁,无法让电动汽车电机运行在更高转速:对于查表法来说,需要获取大量的电动汽车电机表格,工作量大,可移植性差;梯度增量法算法复杂,需要准确电动汽车电机参数;电流角度法不能进行三区运行。现有技术中通过双电流弱磁控制技术都难以克服电动汽车在高速运行状态下,路况变差,突加负载力矩的实际工况。
3.对于传统的定交轴电压单电流弱磁控制来说,虽然解决了交叉耦合效应的问题,但是只落在定交轴单电流弱磁控制,带载能力并不高;而对于运行在电压限制圆的变交轴电压弱磁控制来说,虽然提高了电压利用率,让电流轨迹运行在电压限制圆上,但是难以直接由基速状态切换至电压限制圆上,容易存在失控的问题。
4.因此,现有技术缺乏一种电动汽车永磁同步电机单电流弱磁轨迹控制方法。
技术实现要素:
5.鉴于上述的分析,本发明实施例旨在提供一种电动汽车永磁同步电机单电流弱磁轨迹控制方法,用以解决现有传统双电流弱磁控制方法的鲁棒性差、控制方法复杂、不能深度弱磁的问题。
6.一方面,本发明实施例提供了一种电动汽车永磁同步电机单电流弱磁轨迹控制方法,包括:
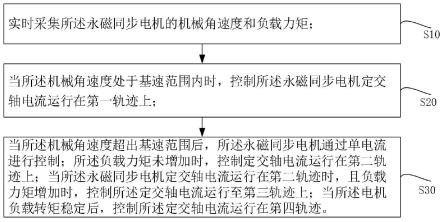
7.实时采集所述永磁同步电机的机械角速度和负载力矩;
8.当所述机械角速度处于基速范围内时,控制所述永磁同步电机定交轴电流运行在第一轨迹上;
9.当所述机械角速度超出基速范围后,所述永磁同步电机通过单电流进行控制;所述负载力矩未增加时,控制定交轴电流运行在第二轨迹上;当所述永磁同步电机定交轴电流运行在第二轨迹时,且负载力矩增加时,控制所述定交轴电流运行至第三轨迹上;当所述电机负载转矩稳定后,控制所述定交轴电流运行在第四轨迹。
10.进一步地,所述第三轨迹为沿着电压限制圆的对称轴由负载力矩切换点s1的位置运行至转速最大力矩点b1的线段。
11.进一步地,所述电压限制圆模型,表达为:
[0012][0013]
其中,id为直轴电流,ω为机械角速度,ls为定子电感,ψm为反电势系数,rs为定子绕组电阻,iq为交轴电流,u
smax
为相电压最大值。
[0014]
进一步地,所述电压限制圆的对称轴,表达为:
[0015][0016]
其中,id为直轴电流,ω为机械角速度,ls为定子绕组电感值,ψm为反电势系数,rs为定子绕组电阻。
[0017]
进一步地,
[0018]
所述转速最大力矩点b1为所述电压限制圆与所述电压限制圆的对称轴的交点。
[0019]
进一步地,当所述机械角速度超出所述基速范围时,设定弱磁控制电压,所述永磁同步电机定交轴电流沿第二轨迹运行,所述第二轨迹为以e点为起点,沿定交轴电压轨迹es运行的曲线;所述e点为基速及克服起动转矩点;
[0020]
所述定交轴电压轨迹es,由以下约束条件限制:
[0021][0022][0023][0024]
其中,iq为交轴电流,ωr=pω为电机电角速度,ls为定子绕组电感值,rs为定子绕组电阻,id是直轴电流,v
fwc
为弱磁控制电压,ψm为反电势系数,te为电磁转矩,p为电机极数,t
l
为负载力矩,ω为机械角速度,j为转动惯量,b为粘滞系数。
[0025]
进一步地,所述负载力矩切换点s1为所述电压限制圆的对称轴与定交轴电压轨迹es的交点。
[0026]
进一步地,当所述机械角速度在基速范围内时,采用id=0的控制算法确定所述第一轨迹,所述第一轨迹为沿定交轴原点运行至基速及克服起动转矩e点的线段;
[0027]
所述e点为基速及克服起动转矩点,e点交轴电流表达为:
[0028][0029]
te=t
l
+bω1+kj
[0030]iq
为交轴电流,te为电磁转矩,p为电机极数,ψm为反电势系数,t
l
为负载力矩,b为粘滞系数,ω1为电机机械角速度基速值,k为电机机械角速度的加速度,j为转动惯量。
[0031]
进一步地,
[0032]
当所述永磁同步电机运行在所述第二轨迹上时,负载力矩增加,所述永磁同步电机先运行至s1点,再沿所述第三轨迹运行。
[0033]
进一步地,当所述负载力矩稳定时,采用变交轴电压弱磁控制算法设置第四轨迹,使电机运行在电压限制圆上。
[0034]
与现有技术相比,本发明至少可实现如下有益效果之一:
[0035]
1、本发明的永磁同步电机单电流弱磁轨迹运行规划方法,提高了永磁同步电机弱磁控制的可控能力;
[0036]
2、采用定交轴单电流弱磁控制,使电流轨迹运行于定交轴单电流弱磁曲线上,再过渡到电压限制圆上的方法,解决了传统双电流弱磁控制方法的鲁棒性差、控制方法复杂、不能深度弱磁的问题;
[0037]
3、本发明所采用的单电流弱磁轨迹运行规划方法,解决了传统定交轴电压单电流弱磁控制的带载能力差的问题,同时也解决了变交轴电压弱磁控制的切换过程容易失控的问题。
[0038]
本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
[0039]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0040]
图1为本技术一个实施例所示的电动汽车永磁同步电机单电流弱磁轨迹控制方法流程图;
[0041]
图2为本技术一个实施例所示的单电流弱磁控制示意图;
[0042]
图3为本技术一个实施例所示的电动汽车永磁同步电机单电流弱磁轨迹控制轨迹示意图;
[0043]
图4为本技术一个实施例所示的电压限制圆模型示意图;
[0044]
图5为本技术一个实施例所示的电动汽车永磁同步电机单电流弱磁轨迹控制方法结构图。
具体实施方式
[0045]
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
[0046]
如图1所示,本发明的一个具体实施例,公开了一种电动汽车永磁同步电机单电流弱磁轨迹控制方法,包括:
[0047]
s10、实时采集所述永磁同步电机的机械角速度和负载力矩;
[0048]
具体地,通过永磁同步电机机械角速度的不同值和负载力矩的变化情况,进行永磁同步电机定交轴电流的控制。
[0049]
具体地,对于电流控制交流电机,直轴电流id和交轴电流iq存在着线性关系,表达为:
[0050][0051]
由公式(1)可知:首先,当电机运行于基速以下,由于交轴电压vq的幅值并没有受限,因此id和iq可以独立控制;其次,当电机运行于基速之上,由于交轴电压vq受限于直流母线电压,id和iq之间有很强的交叉耦合关系;图2为单电流弱磁控制示意图,在图2中可以看出在转速调节器产生的电流指令中,不仅包含转矩电流信息,而且包含去磁电流信息;同传
统双电流弱磁的两个电流调节器相比,只有一个控制器用于主动控制id电流;交轴电压vq为一个固定的值v
fwc
,那么iq将自动产生。
[0052]
当电动汽车pmsm运行于基速之下,电机采用经典矢量控制中的零电流(即i
d*
=0)控制,转速调节器输出交轴电流i
q*
,通过直轴电流调节器pi调节器输出交轴电压v
q*
,i
d*
=0的指令通过交轴电流调节器pi调节器输出为电压v
d*
。
[0053]
具体地,当电动汽车需要运行在更高的转速,pmsm需要运行在基速之上时,达到弱磁条件,则给切换指令,转速调节器的输出作为直轴电流电流环的给定i
d*
通过直轴电流环的pi调节器的作用使id得到调节,从而实现弱磁,定轴电流变化根据交叉耦合关系引起交轴电流的变化。
[0054]
s20、当所述机械角速度处于基速范围内时,控制所述永磁同步电机定交轴电流运行在第一轨迹上;
[0055]
具体地,如图3所示,当所述机械角速度在基速范围内时,采用的控制算法确定所述第一轨迹,所述第一轨迹为沿定交轴原点运行至基速及克服起动转矩e点的线段;电机运行在基速范围内,采用传统的控制,对于电动汽车,起动力矩比较大,随着负载力矩的增加,电磁转矩随之增加至t
e1
,对于标贴式永磁同步电机,电磁转矩正比于交轴电流iq,因此实际的电流运行轨迹则由原点运行至e。
[0056]
所述e点为基速及克服起动转矩点,即当机械角速度ω达到电机机械角速度基速值ω1时对应的交轴电流,e点交轴电流表达为:
[0057][0058][0059]iq
为交轴电流,ω1为电机机械角速度基速值,te为电磁转矩,p为电机极数,ψm为反电势系数,t
l
为负载力矩,b为粘滞系数,为电机机械角速度的加速度,j为转动惯量。
[0060]
s30、当所述机械角速度超出基速范围后,所述永磁同步电机通过单电流进行控制;所述负载力矩未增加时,控制永磁同步电机定交轴电流运行在第二轨迹上;当所述永磁同步电机定交轴电流运行在第二轨迹时,且负载力矩增加时,控制所述永磁同步电机定交轴电流运行至第三轨迹上;当所述电机负载转矩稳定后,控制所述永磁同步电机定交轴电流运行在第四轨迹。
[0061]
具体地,如图3所示,当所述机械角速度超出所述基速范围时,设定弱磁控制电压,所述永磁同步电机定交轴电流沿第二轨迹运行,所述第二轨迹为以e点为起点,沿定交轴电压轨迹es运行的曲线;更具体地,当电机需要运行超出基速范围时,需要采用弱磁的方式,让电机运行在更高的转速下,用定交轴电压单电流弱磁控制方法,即交轴电压给定一个定值为弱磁控制电压v
fwc
时,随着转速的不断增加,弱磁区域的电流轨迹则从e沿着定交轴电压的电流第二轨迹,在es曲线上运行。
[0062]
所述es曲线,由以下约束条件限制:
[0063]
[0064][0065][0066]
其中,iq为交轴电流,ωr=pω为电机电角速度,ls为定子绕组电感值,rs为定子绕组电阻,id是直轴电流,v
fwc
为弱磁控制电压,ψm为反电势系数,te为电磁转矩,p为电机极数,t
l
为负载力矩,ω为机械角速度,j为转动惯量,b为粘滞系数。
[0067]
具体地,所述定交轴电压轨迹es线段与所述电压限制圆的对称轴的交点为负载力矩切换s1点;
[0068]
具体地,所述电压限制圆与所述电压限制圆的对称轴的交点为所述转速最大力矩点b1。
[0069]
更具体地,如图3所示,所述第三轨迹为沿着电压限制圆的对称轴由负载力矩切换点s1的位置运行至转速最大力矩点b1位置的线段;
[0070]
更具体地,当所述永磁同步电机运行在所述第二轨迹上时,负载力矩增加,所述永磁同步电机先运行至s1点,再沿所述第三轨迹运行。
[0071]
具体地,如图4所示,所述电压限制圆模型,表达为:
[0072][0073]
其中,id为直轴电流,ω为机械角速度,ls为定子电感,ψm为反电势系数,rs为定子绕组电阻,iq为交轴电流,u
smax
为相电压最大值。如图4所示,所述电压限制圆随变化而变化。
[0074]
具体地,所述电压限制圆的对称轴,表达为:
[0075][0076]
其中,id为直轴电流,ω为机械角速度,ls为定子绕组电感值,ψm为反电势系数,rs为定子绕组电阻。
[0077]
具体地,当电动汽车由平坦路况变差后,需要克服更大的摩擦力,那么对于电机来说,负载力矩增加,此时需要电机可以在对应的转速上具有可以达到最大转矩的能力,选择让电机运行在相应转速上有机会达到最大转矩输出的点,即电压限制圆的对称轴,再到第三轨迹,沿着来应对负载力矩的增加,而对称轴同定交轴电压轨迹之间的交点,定义为负载力矩切换s1点,当负载力矩再次增加时,切换至第三轨迹,即电机电流会先返回s1点,再沿着当电机由s1点推至b1点,也就是对应转速最大力矩点,具体地,b1点定义为电压限制圆同对称轴的交点,由定交轴电压单电流控制切换为变交轴电压弱磁控制。就意味着电机有能力运行在它的极限最大输出能力的
点。
[0078]
具体地,当所述负载力矩稳定时,采用变交轴电压弱磁控制算法设置第四轨迹,使电机运行在电压限制圆上。
[0079]
更具体地,电流轨迹运行于第四轨迹变交轴电压控制的电压限制圆上,即运行于最大电压利用率点。此时,电动汽车有能力达到相应转速最大转矩输出点,以应对电动汽车在高速运行状态下,路况变差,突加负载力矩的实际工况。
[0080]
具体地,以图5所示,对电动汽车永磁同步电机单电流弱磁轨迹控制方法进行详细描述。
[0081]
首先需要对三相电流进行检测,我们采集的三相静止坐标系下的永磁同步电机的ia,ib,ic三相电流,作为clarke变换的输入,将检测到的三相电流,变换为两相静止坐标系下的i
α
和i
β
,两相静止坐标系下的i
α
和i
β
作为park变换的输入,park变换输出为两相旋转坐标系下的id和iq。
[0082]
直轴电压vd和交轴电压vq作为空间矢量脉宽调制(svpwm)器的输入,输出三相电压va,vb,vc。
[0083]
具体地,电动汽车pmsm基速之下,pmsm采用i
d*
=0的控制方式;当电动汽车pmsm需要运行在更高转速时,我们让电机进入弱磁区域,首先让电机采用单电流弱磁控制方式,转速pi控制器的输出为电流,电流输出为交轴电压v
d*
,而v
d*
由定值v
fwc
来确定;然后采用的方式,让电流轨迹移至电压限制圆;最后,再让电机采用变交轴电压弱磁控制的方法,令电机运行于电压限制圆上。
[0084]
(1)第一轨迹
[0085]
当电机转速在基速范围内(电机参数可以查到电机的最大转速)时,我们选用id=0的控制算法:由第一外环转速控制器、第一内环电流控制器和第二内环电流控制器构成。
[0086]
具体地,第一外环转速控制器中设定的基准转速ω
*
同实际转速做差,得到转速差值δω,转速差值δω作为第一外环转速控制器中第一pi调节器的输入,第一外环转速环的输出为第一交轴基准电流具体地,所述实际转速即可通过位置传感器检测后再进行微分处理,也可由无速度传感器控制的观测器观测到的。
[0087]
第一内环电流控制器为id轴电流控制器,第二内环电流控制器为iq轴电流控制器:
[0088]
设定作为第一内环电流控制器(即id轴电流控制器)的输入,再同park变换输出的定轴电流id做差,得到第一定轴电流差值δi
d1
,第一定轴电流差值δi
d1
作为第一内环电流控制器(即id轴电流控制器)中第二pi调节器的输入;第一内环电流控制器(即id轴电流控制器)输出第一定轴输出电压
[0089]
第一交轴基准电流作为第二内环电流控制器(即iq轴电流控制器)的输入,再同park变换输出的交轴电流iq做差,得到第一交轴电流差值δi
q1
,第一交轴电流差值δi
q1
作为第二内环电流控制器中第三pi调节器的输入;第二内环电流控制器(即iq轴电流控制器)的输出第一交轴输出电压
[0090]
具体地,当永磁同步电机运行在基速范围内,采用传统的id=0控制,对于电动汽
车,起动力矩比较大,随着负载力矩的增加,电磁转矩随之增加至第一电磁力矩t
e1
,对于标贴式永磁同步电机,电磁转矩正比于交轴电流iq,因此实际的电流运行轨迹由原点运行至e点。
[0091]
更具体地,id=0的控制,相当于只有交轴电流iq输出来给电机提供能量,随着电机转速ω和负载力矩t
l
的增加,电磁转矩te也是不断在增加的,交轴电流iq也随之增加,因此,如图4所示,在i
d-iq轨迹分析图中可以看到,电流轨迹为oe这条曲线;
[0092]
(2)第二轨迹
[0093]
当电流转速在基速之上(即电机给定转速大于电机最大转速)时,先让电机运行在定交轴单电流弱磁控制算法,由第二外环转速控制器和第三内环电流控制器(id电流控制器)构成,设定的基准转速ω
*
同实际转速做差,得到δω,δω作为第二外环转速控制器中第四pi调节器的输入,第二外环转速控制器的输出为第一定轴基准电流
[0094]
第一定轴基准电流再同id做差,得到第二定轴电流差值δi
d2
,第二定轴电流差值δi
d2
作为第三内环电流控制器中第五pi调节器的输入,第三内环电流控制器输出第二定轴输出电压
[0095]
第二交轴输出电压v
fwc
为弱磁控制电压(flux-weaken control),是个固定的值,为第一轨迹中输出的第一定轴输出电压的最终值。
[0096]
具体地,当电动汽车负载力矩不变,电磁转矩te不变,转速增加时,第二轨迹近似为一条直线,如图4中直线es。
[0097]
(3)第三轨迹
[0098]
永磁同步电机运行在第二轨迹上时,电动汽车转速运行在基速之上,实际路况变差,负载力矩t
l
增加时,让电机运行在电压限制圆的对称轴,即此时由第四内环电流控制器(id电流控制器)构成;
[0099]
电流作为第四内环电流控制器(id电流控制器)的输入,与park变换输出的定轴电流id做差,得到第三定轴电流差值δi
d3
,三定轴电流差值δi
d3
作为第六pi调节器的输入,第四内环电流控制器输出第三定轴输出电压
[0100]
第三交轴输出电压v
fwc
为弱磁控制电压(flux-weaken control),是个固定的值,为第一轨迹中输出的第一定轴输出电压的最终值。
[0101]
随着负载力矩的增加,电磁转矩te也不断增加,iq因此也会不断增加,如图4所示,此时电流轨迹运行则由s1b1曲线上;
[0102]
(4)第四轨迹
[0103]
更快的,负载力矩稳定,电机负载力矩t
l
稳定,我们采用变交轴电压弱磁控制算法,让电机运行在电压限制圆上,由第三外环转速控制器和第五内环电流控制器(id电流控制器)构成。
[0104]
给定的转速ω
*
同实际转速ω做差,得到转速差值δω,转速差值δω作为第三外环转速控制器中第七pi调节器的输入,第三外环转速控制器输出第二定轴基准电流
[0105]
第二定轴基准电流同定轴电流id做差,得到第四定轴电流差值δi
d4
,第四定轴电流差值δi
d4
作为第五内环电流控制器(id电流控制器)中第八pi调节器的输入,第五内环电流控制器输出第四定轴输出电压
[0106]
第四交轴输出电压表达为:
[0107][0108]
其中,u
smax
为最大相电压值,为交轴电压给定值。
[0109]
如图4所示,此时电机运行在电压限制圆上。
[0110]
电动汽车永磁同步电机单电流弱磁轨迹控制方法,使用单电流弱磁轨迹控制方法提高了永磁同步电机弱磁控制的可控能力;采用定交轴单电流弱磁控制,使电流轨迹运行于定交轴单电流弱磁曲线上,再过渡到电压限制圆上的方法,解决了传统双电流弱磁控制方法的鲁棒性差、控制方法复杂、不能深度弱磁的问题;本发明所采用的单电流弱磁轨迹运行规划方法,解决了传统定交轴电压单电流弱磁控制的带载能力差的问题,同时也解决了变交轴电压弱磁控制的切换过程容易失控的问题。
[0111]
本领域技术人员可以理解,实现上述实施例方法的全部或部分流程,可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于计算机可读存储介质中。其中,所述计算机可读存储介质为磁盘、光盘、只读存储记忆体或随机存储记忆体等。
[0112]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1