一种无刷马达用内部磁位置反馈结构的制作方法
一种无刷马达用内部磁位置反馈结构
【技术领域】
1.本实用新型涉及无刷电机领域,尤其是涉及一种无刷马达用内部磁位置反馈结构。
背景技术:
2.传统的永磁无刷马达通过霍尔位置传感器或光电编码器直接检测转子的位置信息,从而分别实现方波控制和正弦波控制。采用霍尔传感器方波控制的马达谐波含量高,转矩脉动大。这种位置反馈只提供换相位置信息,不能实时检测转子角度,因此多用于低精度马达的解决方案。采用光电编码器正弦波控制方式可以实时检测转子位置,但编码器的体积通常较大,增加马达的制造成本,且易受机械振动的干扰。在有些对于体积或空间有限制的场合,该方案存在很大弊端。因此,磁角度编码解决方案可以结合上述两种方式的优点,弥补各自的不足,近年来在中小型无刷马达中受到广泛关注和研究。磁角度编码通过一块芯片感知磁场强度及方向的变化,从而解码得到角度信息。目前,磁角度编码方案通常是由轴末端嵌入一块外置磁铁跟随转子旋转,磁编芯片靠近轴末端感知磁场的变化。这种结构解决方案使得磁编芯片需处于马达外部,间接地增大了无刷马达系统的体积。
3.为此,有必要改进现有的磁角度编码的结构解决方案,减小体积,节约成本。
技术实现要素:
4.本实用新型针对传统位置反馈方式的局限性,以及现有的磁角度编码解决方案的缺陷,提出一种无刷马达用内部磁位置反馈结构。该结构将基于磁角度编码芯片的位置反馈模块集成于马达结构内部,减小了马达系统的整体体积,提高位置反馈的分辨率,节约制造成本并便于规模化生产。
5.为实现上述目的,我们提供了一种无刷马达用内部磁位置反馈结构,包括机身和设于机身内部的转子,机身的后端设有后端盖,所述转子轴接有贯穿机身前后端的转子转轴,转子转轴位于机身内部设有连轴磁环,所述后端盖上安装有电路板,电路板上接有感应连轴磁环的磁角度编码芯片。
6.于一个或多个实施例中,所述机身上开有引出电路板的接线端子的预留孔,所述接线端子包括磁角度编码芯片的正负极和输出角度解码信息abz。
7.于一个或多个实施例中,所述电路板上接有两个磁角度编码芯片,两个磁角度编码芯片之间的夹角为120度。
8.于一个或多个实施例中,所述后端盖上设有与转子转轴连接的轴承。
9.于一个或多个实施例中,所述磁角度编码芯片的磁场感知方向为转子转轴的轴向。
10.于一个或多个实施例中,所述连轴磁环的充磁方向为转子转轴的轴向,连轴磁环的极数与转子极数相等或为转子极数的倍数。
11.本实用新型同背景技术相比具有以下技术效果:将磁角度编码芯片的位置整体设
于机身内部,通过连轴磁环实现磁场感知,不依赖于外置小磁铁,减少了马达整体体积,提高了结构可靠性,还可以防止外部磁场对位置反馈的干扰,连轴磁环可以设计呈外径较大,采用多极对数充磁的方式,这样可以提高角度信息反馈的分辨率。相比现有的磁编方案,本实用新型提出的结构解决方案将磁角度编码芯片放置在马达的圆周方向上而不是马达的轴正中心,这样可以同时安置多个磁角度编码芯片检测转子位置,并根据实际情况在软件层进行校正,防止单一芯片位置不准造成的持续性偏差。
【附图说明】
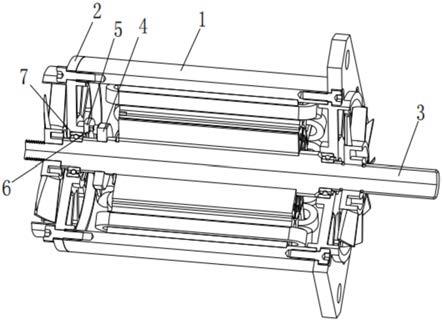
12.图1为本实用新型实施例无刷马达的局部剖视图;
13.图2为本实用新型实施例无刷马达的轴线半剖图;
14.图3为本实用新型实施例电路板和磁角度编码芯片的结构示意图。
【具体实施方式】
15.为了加深对本实用新型的理解,下面将结合实施例和附图对本实用新型作进一步详述,该实施例仅用于解释本实用新型,并不构成对本实用新型的保护范围的限定。
16.请参看图1
‑
3,本申请提供了一种无刷马达用内部磁位置反馈结构,包括机身1和设于机身1内部的转子,机身1的后端设有后端盖2,后端盖2通过螺栓固定在机身1上,所述转子轴接有贯穿机身1前后端的转子转轴3,转子转轴3位于机身1内部设有连轴磁环4,转子转轴3构造出一个凸台结构以限制连轴磁环4的位置,连轴磁环4的内径与转子转轴3的外径通过机械公差形成紧密配合,或者通过螺丝固定在转子转轴3上,以防止连轴磁环4轴向窜动,所述后端盖2上安装有电路板5,电路板5通过螺丝固定在后端盖2上,电路板5上接有感应连轴磁环4的磁角度编码芯片6,本实施例中,电路板5上接有两个夹角呈120
°
的磁角度编码芯片6,磁角度编码芯片6正对连轴磁环4。
17.所述机身1上开有引出电路板5的接线端子51的预留孔,所述接线端子51包括磁角度编码芯片的正负极和输出角度解码信息abz,所述后端盖2上设有与转子转轴3连接的轴承7,预留孔还可以设置在后端盖2上,具体根据马达的具体内部结构而定。
18.所述磁角度编码芯片6的磁场感知方向为转子转轴3的轴向。所述连轴磁环4的充磁方向为转子转轴3的轴向,连轴磁环4的极数与转子极数相等或为转子极数的倍数。
19.以上所述仅为本实用新型的较佳实施方式,本实用新型的保护范围并不以上述实施方式为限,但凡本领域普通技术人员根据本实用新型所揭示内容所作的等效修饰或变化,皆应纳入权利要求书中记载的保护范围内。
技术特征:
1.一种无刷马达用内部磁位置反馈结构,包括机身(1)和设于机身(1)内部的转子,机身(1)的后端设有后端盖(2),其特征在于:所述转子轴接有贯穿机身(1)前后端的转子转轴(3),转子转轴(3)位于机身(1)内部设有连轴磁环(4),所述后端盖(2)上安装有电路板(5),电路板(5)上接有感应连轴磁环(4)的磁角度编码芯片(6)。2.根据权利要求1所述的一种无刷马达用内部磁位置反馈结构,其特征在于:所述机身(1)上开有引出电路板(5)的接线端子(51)的预留孔,所述接线端子(51)包括磁角度编码芯片的正负极和输出角度解码信息abz。3.根据权利要求1所述的一种无刷马达用内部磁位置反馈结构,其特征在于:所述电路板(5)上接有两个磁角度编码芯片(6),两个磁角度编码芯片(6)之间的夹角为120度。4.根据权利要求1所述的一种无刷马达用内部磁位置反馈结构,其特征在于:所述后端盖(2)上设有与转子转轴(3)连接的轴承(7)。5.根据权利要求1所述的一种无刷马达用内部磁位置反馈结构,其特征在于:所述磁角度编码芯片(6)的磁场感知方向为转子转轴(3)的轴向。6.根据权利要求1所述的一种无刷马达用内部磁位置反馈结构,其特征在于:所述连轴磁环(4)的充磁方向为转子转轴(3)的轴向,连轴磁环(4)的极数与转子极数相等或为转子极数的倍数。
技术总结
本实用新型提供一种无刷马达用内部磁位置反馈结构,包括机身和设于机身内部的转子,机身的后端设有后端盖,转子轴接有贯穿机身前后端的转子转轴,转子转轴位于机身内部设有连轴磁环,所述后端盖上安装有电路板,电路板上接有感应连轴磁环的磁角度编码芯片。将磁角度编码芯片的位置整体设于机身内部,通过连轴磁环实现磁场感知,还可以防止外部磁场对位置反馈的干扰,连轴磁环可以设计呈外径较大,采用多极对数充磁的方式,这样可以提高角度信息反馈的分辨率。本实用新型提出的结构解决方案将磁角度编码芯片放置在马达的圆周方向上而不是马达的轴正中心,这样可以同时安置多个磁角度编码芯片检测转子位置,防止单一芯片位置不准造成的持续性偏差。准造成的持续性偏差。准造成的持续性偏差。
技术研发人员:李龙 梁俊强 刘许洋 宋再新
受保护的技术使用者:广东力然电器实业有限公司
技术研发日:2021.03.24
技术公布日:2021/12/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1