高压电线带电接线作业智能机械臂的制作方法
1.本实用新型涉及一种机械臂,特别涉及一种高压电线带电接线作业智能机械臂。
背景技术:
2.架空线路安装线路时为了安全起见需要先停电,之后有人工爬高用扳手将线夹安装,这样的停电操作耽误了居民的用电需求,造成一定的损失。
3.申请号为201921911458.7的中国专利公开了《一种j型线夹安装工具》,包括安装工具本体,安装工具本体包括线夹外壳和线夹夹块,线夹外壳内上部固接有线夹传动杆,线夹传动杆中水平转动连接有套筒,套筒内上部设有十二棱螺母槽,套筒内下部设有十二棱接杆槽,十二棱接杆槽中可拆卸连接有套筒接杆,套筒接杆的底端具有十二角扳头,线夹夹块设有两个并对称固接在线夹外壳顶部两侧,两个线夹夹块的中部和一角处的外侧分别固接有一端封闭设置的中限位套和上限位套,中限位套和上限位套中分别滑动设有可以穿过线夹夹块的中堵头和上堵头,中堵头穿进线夹夹块的一端为上面呈斜面的楔块,上堵头穿进线夹夹块的一端为圆锥头,中限位套和上限位套中设有分别被中堵头和上堵头压缩的弹簧。
4.上述安装工具虽然可以带电实现高压电线架空线路作业,但是具有以下缺点:1、其电机处于绝缘杆下部,需要用传动机构将动力输送至上侧的套筒,加重了装置的整体重量,由于安装工具在操作时,使用者需要将其举至高处,大大增加了使用者的负担。2、作业时只对预放置在线夹内的高压电线有定位,另一侧高压电线没有定位,可能造成安全隐患。3、智能化程度低,电机运转只能依靠人为凭感觉控制,容易造成线夹螺母的脱扣。
技术实现要素:
5.本实用新型所要解决的技术问题是提供一种结构合理、智能化完成接线作业的高压电线带电接线作业智能机械臂。
6.为解决上述技术问题,本实用新型提供了一种高压电线带电接线作业智能机械臂;
7.包括驱动机构、安装座、绝缘杆、夹持机构、第一辅助定位机构和第二辅助定位机构;
8.驱动机构包括驱动电机和穿心套筒扳手,驱动电机的外壳下端与绝缘杆上端固定连接,驱动电机的外壳上端与安装座固定连接,安装座开有贯穿其上下端面的通孔,穿心套筒扳手处于安装座的通孔内,驱动电机的输出轴伸入通孔内且与穿心套筒扳手连接;
9.夹持机构包括两个夹持板,两个夹持板下部分别固定连接在安装座前、后两侧,两个夹持板上部伸出安装座上侧,安装座的通孔处于两个夹持板之间,两个夹持板之间构成放置线夹的夹持区域;
10.第一辅助定位机构包括两个第一定位板,两块第一定位板分别处于两个夹持板外侧,所述第一定位板中部与对应的夹持板铰接,第一定位板一端延伸有与处于线夹左侧夹
块内的高压电线配合的第一夹板部;
11.第二辅助定位机构包括拉动组件和至少一个第二定位板,所述第二定位板与夹持机构的夹持板铰接,所述第二定位板一端延伸有与处于线夹右侧夹块内的高压电线配合的第二夹板部,所述拉动组件至少包括第一拉动杆,第一拉动杆上端与远离第二夹板部位置的第二定位板铰接,第一拉动杆下端向绝缘杆下部方向伸出。
12.为了更清楚的理解本实用新型的技术内容,以下将本高压电线带电接线作业智能机械臂简称为本机械臂。
13.作为本机械臂的优选,所述第一辅助定位机构的第一定位板左、右两端分别伸出夹持板的左右两侧,两个第一定位板的左端分别通过第一销轴连接,两个第一定位板的右端分别通过第二销轴连接。
14.作为本机械臂的优选,所述第一销轴上铰接有供使用者操纵的拉杆。
15.作为本机械臂的优选,本机械臂还包括偏心夹紧机构,偏心夹紧机构包括夹紧杆、挡板和凸轮,夹紧杆一端固定连接在夹持机构的夹持板上,第一辅助定位机构的第一定位板上开有弧形长孔,弧形长孔的中心线所在的圆心处于第一定位板的转动轴线向上,夹紧杆贯穿对应第一定位板的弧形长孔且与凸轮铰接,挡板设置在凸轮与第一定位板之间。
16.作为本机械臂的优选,所述驱动机构的驱动电机配有便携式电池。
17.作为本机械臂的优选,所述拉动组件还包括滑动套和第二拉动杆,滑动套套装在绝缘杆外侧,第一拉动杆下端与滑动套铰接,第二拉动杆上端也与滑动套铰接,第二拉动杆下端伸至绝缘杆下部。
18.作为本机械臂的优选,所述驱动机构的驱动电机通过控制电路控制,控制电路预设有针对若干不同类型螺栓使用的扭力参数,控制电路设有操作模块,操作模块布置在绝缘杆下部,使用者可以通过操作模块选择电机运转参数。
19.作为本机械臂的优选,所述驱动机构的驱动电机设有扭矩释放结构。
20.作为本机械臂的优选,所述夹持机构还包括脱除组件,脱除组件设置在两个夹持板其中一个上端,所述脱除组件包括脱除块和脱除螺栓,脱除块下端面向下延伸有第一脱除板和第二脱除板,第一脱除板与第二脱除板之间形成与对应夹持板的上端配合的脱除槽口,第二脱除板在上下方向的高度小于第一脱除板在上下方向的高度,第一脱除板上开有至少一个腰型孔,腰型孔的长度方向与上下方向一致,脱除螺栓贯穿第一脱除板的腰型孔后与对应夹持之间螺纹配合,脱除螺栓的头部与夹持板之间的宽度大于第一脱除板的厚度。
21.采用这样的结构后,利用安装座安装驱动机构的穿心套筒扳手,夹持机构构成固定线夹的夹持区域,第一辅助定位机构可以实现线夹一侧待接电线的预定位,第二辅助定位机构可以实现线夹另一侧带电电线的预定位,避免旋紧线夹螺栓时,待接电线或带电电线的脱出,降低安全隐患,驱动机构最终完成线夹螺栓的旋紧。
22.本机械臂具有以下有益技术效果:
23.1、结构合理、使用方便。
24.2、相比现有技术,本机械臂的驱动电机处于绝缘杆上部,不需要用传动机构输送动力,减轻了机械臂的整体重量,降低了使用者的负担。
25.3、作业时对待接电线和带电电线都设置定位,避免待接电线或带电电线的脱出,
降低安全隐患。
26.4、智能化程度高,驱动电机的控制电路预设有针对若干不同类型螺栓使用的扭力参数,使用者可以通过操作模块选择电机运转参数,而且驱动电机设有扭矩释放结构,避免造成线夹螺母的脱扣。
附图说明
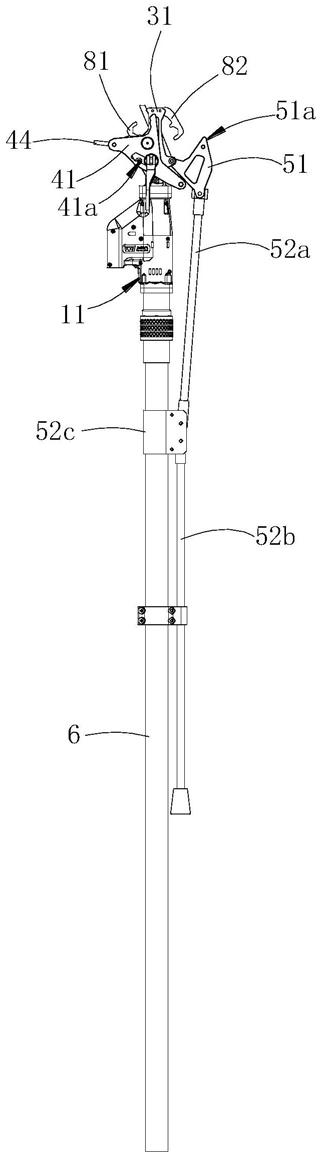
27.图1是本机械臂实施例使用状态的主视图。
28.图2是图1的立体图。
29.图3是本机械臂实施例的立体图。
30.图4是图3的右视图。
31.图5是本机械臂实施例的立体图。
具体实施方式
32.如图1至5所示(图4中省略绝缘杆6和拉动组件)。
33.本机械臂包括驱动机构、安装座2、绝缘杆6、夹持机构、第一辅助定位机构、第二辅助定位机构和偏心夹紧机构。
34.驱动机构包括驱动电机11和穿心套筒扳手,驱动电机11的外壳下端与绝缘杆6上端通过法兰配合螺栓固定,驱动电机11的外壳上端与安装座2通过螺栓固定,安装座2开有贯穿其上下端面的通孔21,穿心套筒扳手(图中未示出)处于安装座2的通孔21内,穿心套筒扳手与线夹8的螺母配合,穿心套筒扳手与安装座2通孔21之间通过轴承配合,驱动电机11的输出轴伸入通孔21内且与穿心套筒扳手连接,驱动电机11设有扭矩释放结构,驱动电机11配有便携式电池。
35.驱动电机11通过控制电路控制,控制电路预设有针对两种不同类型螺栓使用的扭力参数,控制电路设有选择按键电路板,按键电路板布置在绝缘杆6下部的手持区域内,使用者可以通过按键电路板控制电机的开启及选择电机运转参数。
36.夹持机构包括两个夹持板31和脱除组件,两个夹持板31下部分别通过螺栓固定在安装座2前、后两侧,两个夹持板31上部伸出安装座2上侧,安装座2的通孔21处于两个夹持板31之间,两个夹持板31之间构成放置线夹8的夹持区域32,夹持区域32前后方向的宽度略大于线夹8的宽度。
37.脱除组件设置在两个夹持板31其中一个上端,脱除组件包括脱除块33a和两个脱除螺栓33b,脱除块33a下端面向下延伸有第一脱除板33a1和第二脱除板33a2,第一脱除板33a1与第二脱除板33a2之间形成与对应夹持板31的上端配合的脱除槽口33a3,第二脱除板33a2在上下方向的高度小于第一脱除板33a1在上下方向的高度,第二脱除板33a2的厚度大于夹持区域32与放入其中的线夹8之间间隙的宽度,第一脱除板33a1上开有两个腰型孔33a4,腰型孔33a4的长度方向与上下方向一致,并且腰型孔33a4的长度大于第二脱除板33a2的高度,脱除螺栓33b贯穿第一脱除板33a1的腰型孔33a4后与对应夹持之间螺纹配合,脱除螺栓33b的头部与夹持板31之间的宽度大于第一脱除板33a1的厚度。
38.第一辅助定位机构包括两个第一定位板41,两块第一定位板41分别处于两个夹持板31外侧,所述第一定位板41中部与对应的夹持板31铰接,第一定位板41一端延伸有与处
于线夹8左侧夹块81内的高压电线配合的第一夹板部41a。
39.第一辅助定位机构的第一定位板41左、右两端分别伸出夹持板31的左右两侧,两个第一定位板41的左端分别通过第一销轴连接,两个第一定位板41的右端分别通过第二销轴连接,第一销轴上铰接有供使用者操纵的拉杆44。
40.第二辅助定位机构包括拉动组件和两个第二定位板51,两个第二定位板51与夹持机构的两个夹持板31铰接,第二定位板51一端延伸有与处于线夹8右侧夹块82配合的第二夹板部51a,两个第二定位板51之间通过销轴连接。
41.拉动组件包括第一拉动杆52a、滑动套52c和第二拉动杆52b,第一拉动杆52a上端与两个第二定位板51之间的销轴铰接,第一拉动杆52a下端向绝缘杆6下部方向伸出,滑动套52c套装在绝缘杆6外侧,第一拉动杆52a下端与滑动套52c铰接,第二拉动杆52b上端也与滑动套52c铰接,第二拉动杆52b下端伸至绝缘杆6下部。
42.偏心夹紧机构包括夹紧杆71、挡板72和凸轮73,夹紧杆71一端固定连接在夹持机构的夹持板31上,第一辅助定位机构的第一定位板41上开有弧形长孔41b,弧形长孔41b的中心线所在的圆心处于第一定位板41的转动轴线向上,夹紧杆71贯穿对应第一定位板41的弧形长孔41b且与凸轮73铰接,挡板72设置在凸轮73与第一定位板41之间,凸轮73上设有方便操作的手柄73a。
43.接线作业前,先将线夹8放置在夹持机构的夹持区域32内,线夹8的螺母处于安装座2的通孔21内且与穿心套筒扳手配合,脱除块33a的第二脱除板33a2处于线夹8与夹持机构的夹持板31之间,夹持板31在第二脱除板33a2及线夹8的作用下具有向外张开的趋势,夹持板31会产生小幅度的形变;
44.调整线夹8的两个夹块布置角度,使得夹块的线槽与外部连通,再将待接电线放置在线夹8的左侧夹块81线槽内,手动操作拉杆44,使两个第一定位板41的第一夹板部41a抵靠在待接电线上,使待接电线位置得到定位;
45.操作偏心夹紧机构的凸轮73,凸轮73作用挡板72作用在第一定位板41外侧,使得第一定位板41挤压夹持板31,使得线夹8得到进一步固定。
46.接线作业时,将本机械臂举起至工作区域,将线夹8的右侧夹块82的线槽套装在现有通电电线外侧,操作拉动组件的第二拉动杆52b,第二拉动杆52b作用滑动套52c及第一拉动杆52a带动两个第二定位板51翻转,第二定位板51推动线夹8的右侧夹块82向左侧线夹8一侧方向靠近,防止接线作业时带电电线的松动;
47.使用者根据线夹8的螺栓型号,操纵按键电路板,启动两种电机运行模式之一,驱动电机11自动完成旋紧线夹8螺母的操作,旋紧后的线夹8同时将待接电线与带电电线同时夹紧,完成接线作业。
48.完成接线作业后,需要将本机械臂与线夹8脱离,使用者直接竖直向下拉动绝缘杆6,脱除组件的脱除块33a相对的夹持板31向上移动,直至夹持板31脱离第一脱除板33a1与第二脱除板33a2之间的脱除槽口33a3,由于脱除螺栓33b的头部与夹持板31之间的宽度大于第一脱除板33a1的厚度,脱除块33a的第二脱除板33a2则会立即离开夹持机构的夹持区域32,增加夹持区域32的宽度,夹持板31则不会对线夹8挤压,后续线夹8脱除更为方便。
49.以上所述的仅是本实用新型的一种实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干变型和改进,这些也应视为
属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1