分析装置的制作方法
1.本发明涉及一种分析装置。
背景技术:
2.例如在气相色谱仪那样的分析试样的分析装置中,在对用于自动分析试样的机构部进行驱动的自动喷射器等设置有步进马达。这样的步进马达被驱动部以使机构部稳定地动作所需的驱动转矩来驱动。
3.以往,一般设计为:预估由于步进马达自身以及成为其负载的机构部的部件等那样的分析装置中的构成部件的个体差异及经年变化等引起的将来的马达的动作难度的增加倾向等,以比不发生失步所需的最低限度的驱动转矩大得多的驱动转矩来使步进马达进行动作,以避免步进马达长期地失步。
4.另外,作为应对步进马达的失步的控制,存在以下控制,即进行用于在判定为步进马达即将失步的情况下使步进马达的旋转速度下降、由此使驱动转矩增大而与负载对应从而防止发生失步的控制(专利文献1)。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2002-064996号公报
技术实现要素:
8.发明要解决的问题
9.但是,存在如下问题:在以往的执行以按照一般设计设定的驱动转矩来驱动步进马达的控制的情况下,驱动转矩过大到避免失步所需的驱动转矩以上,因此在步进马达中产生振动及噪音增加等不良影响。
10.另外,在专利文献1的步进马达的控制方法中,存在如下问题:当为了避免失步而使步进马达的旋转速度下降从而使驱动转矩增大时,由于旋转速度下降而导致设置有步进马达的分析装置的性能下降。
11.本发明的目的在于提供一种能够降低因应对步进马达的失步而从步进马达产生的振动及噪音的分析装置。
12.用于解决问题的方案
13.根据本公开的一个方面,分析装置具备:步进马达,其驱动用于分析试样的机构部;驱动部,其以所设定的驱动转矩来驱动步进马达;控制部,其控制驱动部;以及检测部,其能够检测步进马达的失步,其中,控制部以如下方式控制驱动部:使步进马达的驱动转矩的设定值阶梯式地在每当利用检测部检测到步进马达失步时增加。
14.分析装置也可以构成为:控制部使步进马达的驱动转矩的设定值在初始设定值与上限设定值之间分多次地在每当利用检测部检测到步进马达失步时增加,通过反复地进行该增加来使步进马达的驱动转矩的设定值阶梯式地增加。
15.分析装置也可以构成为:还具备规定通知部,控制部在步进马达的驱动转矩的设定值达到上限设定值的状态下,响应于利用检测部检测到步进马达失步,使规定通知部执行规定的通知。
16.分析装置也可以构成为:还具备确定通知部,每当利用检测部检测到步进马达失步时,控制部使确定通知部通知使驱动转矩的设定值增加的次数的剩余次数。
17.分析装置也可以构成为:控制部执行通过使步进马达的驱动电流的设定值阶梯式地增加来使驱动转矩的设定值阶梯式地增加的控制。
18.发明的效果
19.根据本发明,提供一种能够降低因应对步进马达的失步而从步进马达产生的振动及噪音的分析装置。
附图说明
20.图1是示出分析装置的结构的图。
21.图2是示出在分析装置中与失步应对控制有关的控制系统的结构的框图。
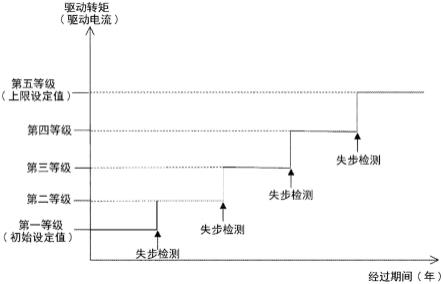
22.图3是示出失步应对控制中的驱动转矩的阶梯式的设定变更例的时序图。
23.图4是以表的形式示出失步应对控制中使用的驱动转矩设定值表例的图。
24.图5是用于失步应对控制的失步应对控制处理的流程图。
具体实施方式
25.下面,参照附图来说明实施方式。
26.[分析装置的结构例]
[0027]
图1是示出用于分析试样的分析装置100的结构的图。分析装置100具备自动试样注入部110、气相色谱仪部120以及检测控制部230。
[0028]
自动试样注入部110具备管形瓶架收容部111、注射器115、注射器驱动部119、柱塞驱动部118、管形瓶架收容部111、控制部130、存储部135、输入部140以及显示部150。
[0029]
注射器115包括前端具有针116的筒132以及滑动自如地嵌插于筒132内的柱塞117。在管形瓶架收容部111的管形瓶架配置多个试样管形瓶112和清洗管形瓶113。在试样管形瓶112封入有分析对象的试样。在清洗管形瓶113封入有用于清洗注射器115的清洗液。
[0030]
注射器驱动部119通过使注射器115整体沿上下方向及水平方向移动,来将针116插入试样管形瓶112或清洗管形瓶113、或者将针116从试样管形瓶112或清洗管形瓶113抽出。注射器驱动部119通过使注射器115整体向下方移动来将针116插入试样汽化室123。注射器驱动部119具备步进马达(参照图2)等驱动源。
[0031]
柱塞驱动部118通过使柱塞117沿上下方向移动来使试样或清洗液注入到筒4内。柱塞驱动部118通过使柱塞117向下方移动来将筒4内的试样注入到试样汽化室123。柱塞驱动部118具备步进马达(参照图2)等驱动源。
[0032]
注射器115和柱塞117相当于用于分析试样的机构部。
[0033]
气相色谱仪部120具备能够进行温度调节的柱温箱121、配设于柱温箱121内的毛细管柱122、配置于毛细管柱122的入口的试样汽化室123以及配置于毛细管柱122的出口的检测器125。
[0034]
试样汽化室123与用于导入载气的载气供给管124连接。被调节为大致固定流量的载气通过载气供给管124被供给到试样汽化室123。在试样汽化室123的上部配置有供针116插入的隔膜131。载气及试样通过试样汽化室123被导入到毛细管柱122。
[0035]
检测器125对在毛细管柱122内分离出的各种成分进行检测。存储部135存储速度表。控制部130具备cpu(central processing unit:中央处理单元)2、rom(read only memory:只读存储器)以及ram(random access memory:随机存取存储器),cpu将rom中存储的控制程序读出到ram并执行,由此cpu基于rom中存储的速度表来控制注射器驱动部119的驱动以及柱塞驱动部118的驱动。
[0036]
检测控制部230具备cpu、rom以及ram,cpu将rom中存储的控制程序读出到ram并执行,由此控制试样汽化室123及柱温箱121的温度调节并执行检测器125的检测结果的数据处理。
[0037]
输入部140受理来自用户的各种指示、条件的设定。输入部140由与个人计算机连接的键盘、鼠标等构成。显示部150显示从控制部130输出的数据处理的结果等。
[0038]
[失步应对控制例]
[0039]
接着,说明在分析装置100中以如下方式进行控制的失步应对控制:在分别设置于柱塞驱动部118和注射器驱动部119的步进马达失步的情况下,使步进马达的驱动转矩的设定值阶梯式地在每当检测到失步时增加。
[0040]
[与失步应对控制相关的结构例]
[0041]
图2是示出在分析装置100中与失步应对控制有关的控制系统的结构的框图。在图2中,对在图1中说明的结构标注相同的附图标记。在柱塞驱动部118中,具备作为柱塞117的动力源的由步进马达构成的柱塞马达182以及驱动柱塞马达182的由驱动电路构成的柱塞马达驱动部181。在注射器驱动部119中,具备作为注射器115的动力源的由步进马达构成的注射器马达192以及驱动注射器马达192的由驱动电路构成的注射器马达驱动部191。
[0042]
柱塞马达驱动部181被从控制部130输入马达控制信号,基于被输入的马达控制信号来向柱塞马达182输出驱动信号。基于从柱塞马达驱动部181输入的驱动信号来对柱塞马达182进行驱动控制。
[0043]
注射器马达驱动部191被从控制部130输入马达控制信号,基于被输入的马达控制信号来向注射器马达192输出驱动信号。基于从注射器马达驱动部191输入的驱动信号来对注射器马达192进行驱动控制。
[0044]
如柱塞马达182和注射器马达192那样的步进马达有时由于经年变化等原因而发生失步。作为能够检测这样的失步的发生的失步检测部160,设置有能够通过检测步进马达的旋转量来检测步进马达是否失步的编码器。作为这样的编码器,在失步检测部160中包括能够通过检测柱塞马达182的旋转量来检测柱塞马达182的失步的柱塞编码器161以及能够通过检测注射器马达192的旋转量来检测注射器马达192的失步的注射器编码器162。响应于利用柱塞编码器161检测出的柱塞马达182的旋转,从柱塞编码器161将编码器检测信号输入到控制部130。响应于利用注射器编码器162检测出的注射器马达192的旋转,从注射器编码器162将编码器检测信号输入到控制部130。
[0045]
控制部130例如后述的图3所示那样将驱动转矩的设定值(驱动转矩设定值)阶梯式地在每当检测到失步时进行设定变更,由此,以尽可能接近于不失步所需的最低限度的
驱动转矩的驱动转矩来分别向柱塞马达182和柱塞马达驱动部181输出马达控制信号。
[0046]
显示部150除了具有前述的各种信息以外,还具有执行与失步的发生对应的各种通知的功能。在利用失步检测部160检测到各马达发生失步时,控制部130基于预先决定的条件的成立来向显示部150输出用于使显示部150执行与失步相关的各种通知显示的图像控制信号。
[0047]
[失步应对控制中的驱动转矩的阶梯式的设定变更模式例]
[0048]
图3是示出失步应对控制中的驱动转矩的阶梯式的设定变更模式例的时序图。在图3中,在纵轴以第一等级~第五等级这样的多个等级示出驱动转矩设定值,在横轴示出从分析装置100的工作开始时起的经过期间。下面,参照图3来说明失步应对控制中的驱动转矩的阶梯式的设定变更例。
[0049]
驱动转矩的设定值是第一等级《第二等级《第三等级《第四等级《第五等级这样的关系。关于驱动转矩的设定值,将第一等级的设定值设定为初始设定值,将第五等级的设定值设定为上限设定值(驱动转矩的设定值的等级的上限值)。通过变更柱塞马达182和注射器马达192那样的步进马达的驱动电流值来实现驱动转矩设定值的变更。步进马达的驱动转矩值具有与驱动电流值成比例这样的关系。针对第一等级~第五等级各自的驱动转矩的设定值,预先决定了对应的驱动电流值。控制部130执行如下控制:与驱动转矩的设定值相应地变更驱动电流值的设定,由此以各等级的驱动转矩来驱动步进马达。
[0050]
虽然认为直到发生失步为止的期间是根据分析装置100的个体差异、设置环境以及稼动率等那样的分析装置100的使用方式而不同的,但在一般的使用方式中,认为在步进马达中每经过以年为单位的期间就会发生失步。
[0051]
在以第一等级的驱动转矩的设定值来驱动柱塞马达182和注射器马达192那样的步进马达的情况下,当基于检测部160的检测信号检测到在步进马达中发生失步时,控制部130进行将驱动转矩的设定值变更为第二等级的驱动转矩的设定值的控制。之后,在以第二等级的驱动转矩的设定值来驱动这样的步进马达的情况下,当基于检测部160的检测信号检测到在步进马达中发生失步时,控制部130进行将驱动转矩的设定值变更为第三等级的驱动转矩的设定值的控制。之后,在以第三等级的驱动转矩的设定值来驱动这样的步进马达的情况下,当基于检测部160的检测信号检测到在步进马达中发生失步时,控制部130进行将驱动转矩的设定值变更为第四等级的驱动转矩的设定值的控制。之后,在以第四等级的驱动转矩的设定值来驱动这样的步进马达的情况下,当基于检测部160的检测信号检测到在步进马达中发生失步时,控制部130进行将驱动转矩的设定值变更为第五等级的驱动转矩的设定值的控制。
[0052]
这样,在失步应对控制中,进行如下控制:使步进马达的驱动转矩的设定值在初始设定值与上限设定值之间分多次地在每当检测到步进马达的失步时增加,通过反复地进行该增加来使步进马达的驱动转矩的设定值阶梯式地增加。
[0053]
这样,在分析装置100中,基于每当检测到失步时就进行驱动转矩的设定值的阶梯式的设定变更的驱动转矩设定变更模式,来对柱塞马达182和注射器马达192那样的步进马达执行失步应对控制。
[0054]
[用于失步应对控制的驱动转矩设定值表例]
[0055]
图4是以表的形式示出失步应对控制中使用的驱动转矩设定值表例的图。在图4
中,作为失步应对控制中使用的驱动转矩设定值表的一例,以表的形式示出了驱动转矩设定值能够在第一等级~第五等级那样的多个等级的范围内进行变更的数据表。这样的驱动转矩设定值表存储于控制部130的rom。作为驱动转矩设定值表,设置有与柱塞马达182对应的驱动转矩设定值表以及与注射器马达192对应的驱动转矩设定值表。下面,参照图4来说明失步应对控制中使用的驱动转矩设定值表例。
[0056]
在图4中,示出了驱动转矩设定值等级、驱动转矩设定值以及驱动转矩设定值的对应关系。驱动转矩设定值的初始设定值被设定为第一等级的第一驱动转矩设定值,通过以第一驱动电流设定值驱动步进马达来实现第一驱动转矩设定值下的步进马达的驱动。在驱动转矩设定值从第一等级起变更后的第二等级中,通过以第二驱动电流设定值驱动步进马达来实现第二驱动转矩设定值下的步进马达的驱动。在驱动转矩设定值从第二等级起变更后的第三等级中,通过以第三驱动电流设定值驱动步进马达来实现第三驱动转矩设定值下的步进马达的驱动。在驱动转矩设定值从第三等级起变更后的第四等级中,通过以第四驱动电流设定值驱动步进马达来实现第四驱动转矩设定值下的步进马达的驱动。在驱动转矩设定值从第四等级起变更后的第五等级中,通过以第五驱动电流设定值驱动步进马达来实现第五驱动转矩设定值下的步进马达的驱动。
[0057]
作为初始设定值的第一等级的第一驱动转矩设定值被设定为使步进马达在分析装置100的工作开始的初始期间不失步所需的最低限度的驱动转矩具有某种程度的余量(余裕)的驱动转矩值。第二等级的第二驱动转矩设定值被设定为使当在第一等级的第一驱动转矩设定值下的工作状态下步进马达失步时之后步进马达不失步所需的最低限度的驱动转矩具有某种程度的余量(余裕)的驱动转矩值。第三等级的第三驱动转矩设定值被设定为使当在第二等级的第二驱动转矩设定值下的工作状态下步进马达失步时之后步进马达不失步所需的最低限度的驱动转矩具有某种程度的余量(余裕)的驱动转矩值。第四等级的第四驱动转矩设定值被设定为使当在第三等级的第三驱动转矩设定值下的工作状态下步进马达失步时之后步进马达不失步所需的最低限度的驱动转矩具有某种程度的余量(余裕)的驱动转矩值。第五等级的第五驱动转矩设定值被设定为使当在第四等级的第四驱动转矩设定值下的工作状态下步进马达失步时之后步进马达不失步所需的最低限度的驱动转矩具有某种程度的余量(余裕)的驱动转矩值。
[0058]
这样,第一等级~第五等级的各等级的驱动转矩设定值被设定为使步进马达在各等级中的工作状态下不失步所需的最低限度的驱动转矩值具有某种程度的余量(余裕)的驱动转矩值。这样的第一等级~第五等级的各等级的驱动转矩设定值被设定为尽可能接近于步进马达在各等级中的工作状态下不失步所需的最低限度的驱动转矩值的驱动转矩值。
[0059]
以第一等级~第五等级的各等级的驱动转矩设定值成为使步进马达在各等级中的工作状态下不失步所需的最低限度的驱动转矩值具有某种程度的余量(余裕)的驱动转矩值的方式设定驱动电流设定值,由此实现第一等级~第五等级的各等级的驱动转矩设定值。例如,第一驱动电流设定值~第五驱动电流设定值的各等级中的驱动电流值的增加值被设定为固定。步进马达的驱动转矩由驱动电流控制,因此在设定为第一驱动电流设定值~第五驱动电流设定值的各等级中的驱动电流值的增加值固定的情况下,能够简化控制部130的控制。
[0060]
在执行以使步进马达的驱动转矩设定值在多个等级中阶梯式地在每当检测到步
进马达失步时增加的方式控制驱动部的失步应对控制的情况下,各等级中的驱动转矩设定值的增加值越多,直到下一次发生失步为止的期间越长,但马达的振动及噪音越大。另外,由步进马达驱动的机构部的负载越大,步进马达在各等级中的工作状态下不失步所需的最低限度的驱动转矩值越大。因而,考虑到这些情况,期望的是,将在执行失步应对控制的情况下的驱动转矩的设定值的等级数以及各等级中的驱动转矩设定值的增加量设定为最优值。
[0061]
在失步应对控制中,使步进马达的驱动转矩的设定值在初始设定值与上限设定值之间分多次地在每当检测到步进马达失步时增加,因此能够减少在检测到步进马达失步时增加的1次量的驱动转矩的设定值的增加幅度。另外,在失步应对控制中,执行通过使步进马达的驱动电流的设定值阶梯式地增加来使驱动转矩的设定值阶梯式地增加的控制,因此相比于与降低步进马达的转速相应地使驱动转矩设定值增加的现有技术而言,能够抑制与使驱动转矩增加相应地从步进马达产生的振动及噪音。
[0062]
[失步应对控制处理例]
[0063]
图5是用于失步应对控制的失步应对控制处理的流程图。失步应对控制处理的程序存储于控制部130的rom,控制部130的cpu将该失步应对控制处理的程序读出到ram并执行。在驱动柱塞马达182和注射器马达192那样的步进马达时执行图5的失步应对控制处理,图5的失步应对控制处理是用于在检测到所驱动的步进马达发生了失步时通过变更该步进马达的驱动转矩设定值并进行重试动作从而能够不使分析装置100停止地使步进马达从失步状态恢复为正常状态(非失步状态)的处理。
[0064]
参照图5,下面对利用控制部130执行的失步应对控制处理的内容进行说明。首先,通过步骤s(以下简称为s)1,基于从失步检测部160输入的编码器检测信号,判断是否检测到在控制对象的步进马达中发生了失步。具体地说,在s1中,基于编码器检测信号,确认步进马达是否旋转了设定旋转量,在确认到旋转了设定旋转量的情况下,判断为未发生失步,在确认到没有旋转设定旋转量的情况下,判断为发生了失步。在s1中,在判断为未检测到发生了失步时,处理返回。
[0065]
当在s1中判断为检测到发生了失步时,通过s2,对驱动转矩设定值等级剩余数的数据减去“1”。驱动转矩设定值等级剩余数的数据是在对如图3及图4所示那样的能够以多个等级变更的驱动转矩设定值进行变更的情况下的到最终等级(上限设定值)为止能够变更的驱动转矩设定值的等级的剩余数(剩余等级数)。例如,如图4所示,在驱动转矩设定值能够从第一等级变更到第五等级的情况下,在以第一等级的驱动转矩设定值驱动步进马达的过程中检测到失步而变更为第二等级的驱动转矩设定值时的“驱动转矩设定值等级剩余数”是“3”。这样的“驱动转矩设定值等级剩余数”的数据存储在控制部130的ram中并被更新。关于“驱动转矩设定值等级剩余数”的数据,将初始设定值设定为“最终等级数-初始等级数”的值(例如在图4的情况下是“4”),之后,每当检测到1次失步就通过s2减去“1”来进行更新。
[0066]
接着,通过s3,基于通过s2中的减法运算得到的驱动转矩设定值等级剩余数的数据,判断当前的状态是否是在驱动转矩设定值的等级达到上限设定值的等级(最终等级)的状态下通过s1检测到失步的状态。例如,在使用图4的驱动转矩设定值表的情况下,在s4中,在通过s2中的减法运算得到的驱动转矩设定值等级剩余数是
“‑
1”时,判断为符合“在驱动
转矩设定值的等级达到上限设定值的等级的状态下检测到失步的状态”,另一方面,在通过s2中的减法运算得到的驱动转矩设定值等级剩余数是大于
“‑
1”的数(“0”以上)时,判断为不符合“在驱动转矩设定值的等级达到上限设定值的等级的状态下检测到失步的状态”。
[0067]
当在s3中判断为不符合“在驱动转矩设定值的等级达到上限设定值的等级的状态下检测到失步的状态”的情况下,通过s4,基于如图4所示那样的驱动转矩设定值表来使发生了失步的步进马达的驱动转矩的设定值增加1个等级,由此使驱动转矩的设定值阶梯式地增加(通过使驱动电流设定值如图4所示那样增加1个等级来实现)。由此,针对发生了失步的步进马达,执行通过使从马达驱动部供给的驱动电流增加1个等级来使驱动转矩增加1个等级的控制,变更驱动转矩设定值,从而从失步状态恢复为正常状态。
[0068]
在s4之后,进入s5,基于在s2中进行减法后更新的驱动转矩设定值等级剩余数的数据,使显示部150显示能够确定当前的驱动转矩设定值等级剩余数的图像,由此执行用于通知能够使驱动转矩的设定值增加的次数的剩余数(驱动转矩设定值等级剩余数)的确定通知。例如,利用“驱动转矩设定值等级剩余数〔3〕次”这样的文字及数字的图像等来通知驱动转矩设定值等级剩余数。通过像这样通知驱动转矩设定值等级剩余数,分析装置100的管理者能够掌握分析装置100之后能够在何种程度的期间内持续工作。
[0069]
在s5之后,进入s6,再次执行在s4中被变更了驱动转矩设定值的步进马达的驱动,由此进行用于执行重试动作的处理,该重试动作是将步进马达的发生了失步的柱塞117或注射器115的动作再次执行的动作。之后,处理返回。
[0070]
另一方面,当在s3中判断为符合“在驱动转矩设定值的等级达到上限设定值的等级的状态下检测到失步的状态”的情况下,通过s7,显示用于警告在驱动转矩设定值达到上限设定值的状态下检测到失步的图像(例如“在驱动转矩设定上限时发生失步!”这样的文字图像等),由此执行警告在处于驱动转矩设定上限值的状态下发生了失步的规定通知(驱动转矩设定上限时失步警告的通知)。之后,处理返回。通过像这样进行警告在处于驱动转矩设定上限值的状态下发生了失步的驱动转矩设定上限时失步警告的通知,分析装置100的管理者能够掌握分析装置100由于步进马达的失步而成为无法正常工作的状态。
[0071]
以上所说明的失步应对控制处理在驱动柱塞马达182和注射器马达192那样的步进马达时反复执行。由此,针对这样的步进马达,执行使驱动转矩设定值阶梯式地在每当检测到发生了失步时增加以使步进马达从失步状态恢复为正常状态(非失步状态)的设定变更。
[0072]
这样的失步应对控制处理既可以独立地设置并执行与柱塞马达182对应的失步应对控制处理以及与注射器马达192对应的失步应对控制处理,也可以对柱塞马达182依次执行相同的失步应对控制处理。
[0073]
[通过实施方式得到的效果]
[0074]
(1)在本实施方式的分析装置100中,如图5的失步对应处理所示,针对柱塞马达182和注射器马达192那样的步进马达,执行使驱动转矩设定值阶梯式地在每当检测到发生了失步时增加以使步进马达从失步状态恢复为非失步状态的设定变更。由此,在分析装置100中,能够在步进马达中发生了失步时,使驱动转矩在尽可能接近于从失步状态恢复为非失步状态所需的最低限度的范围内增加,因此能够抑制从步进马达产生的振动及噪音,能够降低因应对步进马达的失步而从步进马达产生的振动及噪音。
[0075]
(2)在分析装置100中,如图3所示,使步进马达的驱动转矩的设定值在初始设定值与上限设定值之间分多次地在每当基于失步检测部160的检测信号检测到柱塞马达182和注射器马达192那样的步进马达失步时增加,通过反复地进行该增加来使步进马达的驱动转矩的设定值阶梯式地增加。这样,在分析装置100中,使步进马达的驱动转矩的设定值在初始设定值与上限设定值之间分多次地在每当检测到步进马达的失步时增加,因此能够减少在检测到步进马达失步时增加的1次量的驱动转矩的设定值的增加幅度。
[0076]
(3)在分析装置100中,如图5的s7所示,响应于在步进马达的驱动转矩的设定值达到上限设定值的状态下检测到步进马达失步,执行警告发生了失步的规定通知。由此,分析装置100的管理者能够掌握分析装置100由于步进马达的失步而成为无法正常工作的状态。
[0077]
(4)在分析装置100中,如图5的s5所示,每当检测到步进马达失步时,执行通知驱动转矩设定值等级剩余数的确定通知。由此,分析装置100的管理者能够掌握分析装置100之后能够在何种程度的期间内持续工作。
[0078]
(5)在分析装置100中,如图3~图5所示,控制部130执行通过使步进马达的驱动电流设定值阶梯式地增加来使驱动转矩设定值阶梯式地增加的控制。由此,相比于与降低步进马达的转速相应地使驱动转矩设定值增加的现有技术而言,能够抑制与使驱动转矩增加相应地从步进马达产生的振动及噪音。
[0079]
[实施方式的变形例]
[0080]
(1)成为执行前述的失步应对控制的对象的分析装置不限于前述的使用气相色谱仪的分析装置100,只要是具备对用于分析试样的机构部进行驱动的步进马达的分析装置即可,可以是使用液相色谱仪的分析装置等其它各种分析装置。另外,成为执行失步应对控制的对象的分析装置也可以是自动试样注入装置等构成分析系统的一部分的装置。另外,前述的失步应对控制也可以应用于在自动采样器等其它各种分析装置中使用的装置。
[0081]
(2)前述的失步应对控制中的驱动转矩设定值的等级数不限于图3及图4等中说明的第一等级~第五等级,例如也可以是第一等级~第三等级、第一等级~第十等级等那样的其它等级数。也就是说,失步应对控制中的驱动转矩设定值只要设定为在初始设定值与上限设定值之间分为多个等级地增加,可以设定为任何等级。
[0082]
(3)既可以将前述的失步应对控制中的多个等级的驱动转矩设定值设定为如图4中说明的那样的各等级的驱动电流设定值的增加量成为固定,或者也可以以各等级的驱动转矩设定值的增加量成为固定的方式设定驱动电流设定值。这是由于:步进马达的特性(驱动电流与驱动转矩的比例关系)随着驱动转矩接近上限设定值而变化,因此当使驱动电流设定值的增加量固定时,驱动转矩设定值的增加量不一定固定,当使驱动转矩设定值的增加量固定时,驱动转矩设定值的增加量不一定固定。
[0083]
(4)前述的失步应对控制中的多个等级的驱动转矩设定值既可以是各等级的驱动转矩的增加幅度不同(驱动转矩设定值增加幅度可变式),也可以是各等级的驱动转矩的增加幅度相同(驱动转矩设定值增加幅度固定式)。例如,多个等级的驱动转矩设定值既可以是在各等级增加固定的驱动转矩值,也可以是每当前进一个等级时驱动转矩值的增加幅度变大。
[0084]
(5)前述的步进马达的失步应对控制不限于对前述的柱塞和注射器执行,只要是被步进马达驱动的机构部即可,能够以各种分析装置所具备的其它各种机构部为对象来执
行。
[0085]
(6)在前述的步进马达的失步应对控制中,示出了在作为相同的通知部的显示部150中执行图5的s5的驱动转矩设定值等级剩余数的通知以及图5的s7的驱动转矩设定上限时失步警告的通知的例子。但是,不限于此,这些通知也可以在不同的通知部(不同的显示部等)中执行。
[0086]
(7)在前述的步进马达的失步应对控制中,作为图5的s5的通知驱动转矩设定值等级剩余数的确定通知,除了前述的数字及文字的图像以外,也可以通过声音输出来进行通知,还可以通过将文字的图像或声音输出分别单独地与led等发光体的发光进行组合的通知方式、或者将文字的图像或声音输出各自的组合与led等发光体的发光进行组合的通知方式来执行通知。另外,作为图5的s7的通知驱动转矩设定上限时失步警告的规定通知,除了前述的文字的图像以外,也可以通过声音输出来进行通知,还可以通过将文字的图像或声音输出分别单独地与led等发光体的发光进行组合的通知方式、或者将文字的图像或声音输出各自的组合与led等发光体的发光进行组合的通知方式来执行通知。
[0087]
(8)优选的是,将在前述的步进马达的失步应对控制中设定的各等级的驱动转矩的设定值设定为使步进马达在各等级中不失步所需的最低限度的驱动转矩具有某种程度的余量(余裕)的驱动转矩值,但只要至少设定为步进马达不失步所需的最低限度的驱动转矩值即可。
[0088]
(9)在前述的步进马达的失步应对控制中,如图5的s5所示,每当检测到失步而增加1个等级时,通知驱动转矩设定值等级剩余数,但该驱动转矩设定值等级剩余数的通知也可以仅在驱动转矩设定值等级剩余数变为“0”的等级、即驱动转矩设定值成为上限设定值的等级(最终等级)执行。根据这样的控制,分析装置100的使用者能够掌握分析装置100由于步进马达的失步而在不久的将来成为无法正常工作的状态。而且,根据这样的控制,能够简化通知驱动转矩设定值等级剩余数的处理。另外,驱动转矩设定值等级剩余数的通知也可以从驱动转矩设定值等级剩余数接近“0”的规定等级(例如驱动转矩设定值等级剩余数是“1”的等级等)起执行至驱动转矩设定值等级剩余数变为“0”的等级。
[0089]
(10)在前述的步进马达的失步应对控制中,如图5的s5所示,每当检测到失步而增加1个等级时,通知驱动转矩设定值等级剩余数,但只要至少执行图5的s7的驱动转矩设定上限时失步警告的通知即可,也可以不执行每当检测到失步而增加1个等级时的驱动转矩设定值等级剩余数的通知。根据这样的控制,对于分析装置100的使用者而言,能够使其感觉不到该通知恼人。
[0090]
(11)在前述的步进马达的失步应对控制中,当在处于驱动转矩设定上限值的状态下发生了失步时,通知规定的警告,但在驱动转矩设定值等级剩余数变为“0”的等级、即驱动转矩设定值成为上限设定值的等级(最终等级)中,在不久的将来检测到失步时分析装置100成为无法正常工作的状态,因此在这样的驱动转矩设定值等级剩余数变为“0”的等级中,通知规定的警告,例如显示“达到驱动转矩设定上限,下一次马达失步时装置将停止!”这样的文字图像等。
[0091]
(12)虽然示出了在失步检测部160中使用如柱塞编码器161和注射器马达192那样对步进马达的旋转量进行检测的检测器的例子,但不限于此,也可以设置光断路器等其它检测器以检测失步的发生。这样,作为失步检测部160,只要是能够检测步进马达是否正常
进行动作的检测单元即可,也可以设置其它检测单元。
[0092]
(13)前述的分析装置100也可以构成为如下的分析系统:以独立的装置构成自动试样注入部110、气相色谱仪部120、控制部130以及检测控制部230,并将这些装置组合地使用。在该情况下,也可以由个人计算机构成控制部130和检测控制部230。例如,也可以是,通过个人计算机内的cpu执行存储装置中保存的程序来实现控制部130和检测控制部230。在该情况下,也可以是,利用个人计算机的显示部构成显示部150,利用个人计算机的输入部构成输入部140,利用个人计算机的存储部构成存储部135。
[0093]
[附记]
[0094]
本公开的分析装置具备以下的特征。
[0095]
(1)分析装置具备:步进马达(柱塞马达182、注射器马达192等),其驱动用于分析试样的机构部;驱动部(柱塞马达驱动部181、注射器马达驱动部191等),其以所设定的驱动转矩来驱动所述步进马达;控制部(控制部130等),其控制所述驱动部;以及检测部(失步检测部160),其能够检测所述步进马达的失步,其中,所述控制部以如下方式控制所述驱动部:使所述步进马达的驱动转矩的设定值阶梯式地在每当利用所述检测部检测到所述步进马达失步时增加(图3、图4、图5的s4等)。
[0096]
(2)所述控制部使所述步进马达的驱动转矩的设定值在初始设定值与上限设定值之间分多次地在每当利用所述检测部检测到所述步进马达失步时增加,通过反复地进行该增加来使所述步进马达的驱动转矩的设定值阶梯式地增加(图3、图4等)。
[0097]
(3)还具备规定通知部(显示部150等),所述控制部在所述步进马达的驱动转矩的设定值达到所述上限设定值的状态下,响应于利用所述检测部检测到所述步进马达失步,使所述规定通知部执行规定的通知(图5的s7)。
[0098]
(4)还具备确定通知部(显示部150等),每当利用所述检测部检测到所述步进马达失步时,所述控制部使所述确定通知部通知使驱动转矩的设定值增加的次数的剩余次数(图5的s5)。
[0099]
(5)所述控制部执行通过使所述步进马达的驱动电流的设定值阶梯式地增加来使所述驱动转矩的设定值阶梯式地增加的控制(图3、图4等)。
[0100]
应当认为本次公开的实施方式在所有方面均为例示而非限制性的。本发明的范围由权利要求书示出而不是由上述的说明示出,旨在包括在与权利要求书等同的含义及范围内的所有变更。
[0101]
附图标记说明
[0102]
182:柱塞马达;192:注射器马达;181:柱塞马达驱动部;191:注射器马达驱动部;130:控制部;160:失步检测部;150:显示部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1