一种降压同步整流电路轻载条件下的高侧软开关控制系统的制作方法
1.本发明涉及电源技术领域,尤其涉及一种降压同步整流电路轻载条件下的高侧软开关控制系统。
背景技术:
2.目前,环保、全集成和高效率已经成为电源技术发展的必然趋势,这就使得高密度、高效率的功率变换器已经成为电源功率变换的主流技术。降压同步整流(buck synchronous rectifier)电路使用导通电阻较小的同步整流功率管替代传统非同步整流电路中导通压降较高的二极管,因此更适合应用在高功率密度、高效率的场景中。在降压同步整流电路的控制中,有三种电流控制方式,分别为:电流连续模式ccm(continuous current mode)控制方式;电流断续模式dcm(discontinuous current mode)控制方式;强制电流连续模式fccm(forced continuous current mode)控制方式。
3.由于ccm控制方式其电感电感电流纹波最小,功率因数pf(power factor)和电磁干扰emi(electromagnetic interference)等特点优于dcm控制方式,因此被广泛应用于电源技术领域的整流电路当中。但是负载为轻载条件下,负载电流较小且电感电流存在倒灌现象时,ccm就变为fccm控制方式。当同步整流功率管关闭后,倒灌的电感电流给开关节点的寄生电容充电,使得开关节点电压vs上升到等于输入电压vin时,再开启功率管mh,从而实现高侧软开关提高功率转换效率。
4.如图1,为现有技术提供的一种固定死区电路的结构示意图,该固定死区电路一般是设置在ccm电流控制方式下工作,但如果由于输入电压vin和负载电流的变化导致电流控制方式变为fccm或dcm,那么这种固定死区电路会产生较多的损耗。图1包括固定死区产生电路001、高压电平移位电路002、驱动级电路003、高低侧功率管004和负载电路005。其中高侧功率管mh和低侧功率管ml可采用gan(氮化镓)或者mosfet(场效应晶体管)。为了提高降压同步整流电路的功率转换效率。图1在负载为轻载条件下(即负载电流较小),对固定死区电路结构的功率管mh开启情况进行具体分析,输入信号vpwm经过固定死区产生电路001,然后经过高压电平移位电路002、最后经过驱动级电路003中的高侧驱动电路gh传递到功率管mh的栅端。由于节点电压vs上升和下降的斜率随着输入电压vin和负载电流的改变而变化,当输入电压vin增大或者负载电流减小时,节点电压vs上升的斜率就随之减小,导致功率管mh的开启会产生较大的开关损耗;当输入电压vin减小或者负载电流增大时,节点电压vs上升的斜率就随之增大,导致功率管mh的开启会产生较大的反向导通损耗。因此,如何提高降压同步整流电路的功率转换效率已成为亟待解决的问题。
技术实现要素:
5.针对上述现有技术中存在的降压同步整流电路轻载条件下功率转换效率低的问题,本发明提出了一种降压同步整流电路轻载条件下的高侧软开关控制系统,可以根据输入电压vin或者负载电流的变化自适应调整死区时间,从而实现高侧功率管mh的软开关,显
著提高了降压同步整流电路轻载条件下的功率转换效率。
6.为实现上述发明目的,本发明采用的技术方案为:一种降压同步整流电路轻载条件下的高侧软开关控制系统,包括固定死区产生电路(001)、高压电平移位电路(002)、驱动级电路(003)、高低侧功率管电路(004)和负载电路(005),其中,驱动级电路(003)中设有高侧驱动电路gh和低侧驱动电路gl;高低侧功率管电路(004)中设有电源vin以及高侧功率管mh和低侧功率管ml;负载电路(005)中设有电感l、电容co和电阻r;输入信号vpwm依次经固定死区产生电路(001)和高压电平移位电路(002)后连接驱动级电路(003)中高侧驱动电路gh的输入端,高侧驱动电路gh的输出连接高低侧功率管电路(004)中高侧功率管mh的栅极,高侧功率管mh的漏极连接输入电源vin的正端,输入电源vin的负端接地,前一级mcu芯片或控制器产生的脉冲控制信号作为输入信号vpwm连接驱动级电路(003)中低侧驱动电路gl的输入端,低侧驱动电路gl的输出连接连接高低侧功率管电路(004)中低侧功率管ml的栅极,低侧功率管ml的源极接地,高侧功率管mh的源极以及低侧功率管ml的漏极和负载电路(005)中电感l的一端连接在一起产生浮动地电压vs,电感l的另一端连接电容co的一端和电阻r的一端,电容co的另一端和电阻r的另一端均接地;
7.其特征在于:设置高侧死区控制电路(006)替代固定死区产生电路(001),高侧死区控制电路(006)包括电流过零检测电路(007)、高侧过零检测电路(008)、降压电平移位电路(009)、设定延时电路模块(010)以及低电平有效的sr触发器sr1和高电平有效的sr触发器sr2以及三输入或门or,电流过零检测电路(007)的输入端和高侧过零检测电路(008)的输入端均连接浮动地电压vs,电流过零检测电路(007)输出控制信号v1连接sr触发器sr1的置位输入端s,sr触发器sr1的复位输入端r连接输入信号vpwm,sr触发器sr1的输出端q输出信号h_ccm连接三输入或门or的一个输入端;高侧过零检测电路(008)输出控制信号v2连接降压电平移位电路(009)的输入端,降压电平移位电路(009)输出控制信号v3连接sr触发器sr2的置位输入端s,sr触发器sr2的复位输入端r连接输入信号vpwm,sr触发器sr2的输出端q输出信号h_fccm连接三输入或门or的另一个输入端;设定延时电路模块(010)的输入端连接输入信号vpwm,设定延时电路模块(010)的输出连接三输入或门or的第三个输入端,三输入或门or输出信号h_drh作为高压电平移位电路(002)的输入信号;
8.所述电流过零检测电路(007)包括恒流源idc1、pmos管mp1、mp2、mp3和mp4、nmos管mn1、mn2、mn3、mn4、mn5和mnh1;恒流源idc1的输入端连接芯片电源vcc,恒流源idc1的输出端连接nmos管mn1的漏极、栅极以及nmos管mn2的栅极和nmos管mn3的栅极;nmos管mn1的源极和nmos管mn2的源极均接地,nmos管mn2的漏极连接pmos管mp1的漏极、栅极以及pmos管mp2的栅极和nmos管mp3的栅极,pmos管mp1的源极、pmos管mp2的源极、pmos管mp3的源极和pmos管mp4的源极均连接芯片电源vcc,pmos管mp2的漏极连接nmos管mn3的漏极和nmos管mn4的栅极,nmos管mn3的源极连接nmos管mnh1的源极,nmos管mnh1的漏极连接浮动地电压vs,nmos管mnh1的栅极连接输入信号vpwm,pmos管mp3和pmos管mp4的源极均连接芯片电源电压vcc,pmos管mp3的漏极与pmos管mp4的栅极、nmos管mn4的漏极和nmos管mn5的栅极互连,nmos管mn4的源极和nmos管mn5的源极均接地,pmos管的mp4的漏极和nmos管mn5的漏极互连作为电流过零检测电路(007)输出控制信号v1的输出端;
9.所述高侧过零检测电路(008)包括恒流源idc2、pmos管mp5、nmos管mn6、mn7和mnh2和比较器cmp;恒流源idc2的输入端和pmos管mp5的源极均连接芯片浮动电源vb,恒流源
idc2的输出端连接nmos管mn6的漏极和栅极以及nmos管mn7的栅极,nmos管mn6的源极和nmos管mn7的源极均连接浮动地电压vs,nmos管mn7的漏极与pmos管mp5的栅极、漏极以及比较器cmp的负端和nmos管mnh2的源极连接,nmos管mnh2的栅极和比较器cmp的正端均连接浮动地电压vs,nmos管mnh2的漏极连接输入电压vin,比较器cmp的输出端作为高侧过零检测电路(008)输出控制信号v2的输出端。
10.上述系统中,通过高侧死区控制电路(006)内的电流过零检测电路(007)、高侧过零检测电路(008)、降压电平移位电路(009)、设定延时电路模块(010)以及sr触发器sr1、高电平有效的sr触发器sr2和三输入或门or的相互配合共同实现根据输入电压vin和负载电流的变化自动地调整ccm和fccm控制方式,从而实现ccm控制方式下低二极管导通损耗和fccm模式下功率管mh的软开启;根据电感l的电流是否出现倒灌现象,即电感电流是否过零,电流过零检测电路(007)和高侧过零检测电路(008)输出不同的控制信号v1和v2;控制信号v1经过sr触发器sr1、三输入或门or、高压电平移位电路(002)和输出级电路(003)中的高侧驱动电路gh后就变为ccm模式下功率管mh开启的栅极控制信号vgh;同理,控制信号v2经过降压电平移位电路(009)、sr触发器sr2、三输入或门or、高压电平移位电路(002)和输出级电路(003)中的高侧驱动电路gh后就变为fccm模式下功率管mh开启的栅极控制信号vgh。
11.系统的控制过程如下:
12.ccm控制过程:当输出为重载条件下,输出负载电流很大,电感电流不存在倒灌现象,在功率管mh还未开启且功率管ml关断后,电流过零检测电路(007)通过检测vs电压是否存在负电压来判断电感电流是否出现倒灌现象;如果vs电压存在负电压,说明是功率管ml的体二极管在进行续流作用,因此电感电流不会出现倒灌现象,则整流电路为ccm控制方式;电流过零检测电路(007)会检测功率管ml的体二极管续流时负电压vs的下降边沿作为控制功率管mh开启的控制信号v1,输入信号vpwm连接sr触发器sr1的复位端r,作为控制功率管mh关闭的控制信号,sr触发器sr1输出端q输出控制信号h_ccm经过三输入或门or、高压电平移位电路(002)和驱动级电路(003)中的高侧驱动电路gh变为功率管mh的栅极控制信号vgh;
13.fccm控制过程1:当输出为轻载条件下,输出负载电流较小,电感电流会存在倒灌现象,在功率管mh还未开启且功率管ml关断后,电流过零检测电路(007)通过检测vs电压是否存在负电压来判断电感电流是否出现倒灌现象;如果vs电压不存在负电压,说明电感电流会出现倒灌现象,而且倒灌电流给节点寄生电容充电,节点电压vs开始上升,则整流电路为fccm控制方式,高侧过零检测电路(008)将检测节点电压vs是否被充电到大于输入电压vin,同时将检测节点电压vs等于输入电压vin时对应的上升边沿作为控制功率管mh开启的控制信号v2;该高压域的控制信号v2经过降压电平移位电路(009)转换为低压域的控制信号v3;输入信号vpwm连接sr触发器sr2的复位端r,作为控制功率管mh关闭的控制信号,sr触发器sr2的输出端q输出控制信号h_fccm经过sr触发器sr2、三输入或门or、高压电平移位电路(002)和驱动级电路(003)中的高侧驱动电路gh变为功率管mh开启的栅极控制信号vgh;
14.fccm控制过程2:当输出为轻载条件下,输出负载电流很小,即节点电压vs上升到输入电压vin所需时间大于根据系统频率不同设定的200ns对应的负载电流,电感电流会存在倒灌现象,在功率管mh还未开启且功率管ml关断后,电流过零检测电路(007)通过检测vs
电压是否存在负电压来判断电感电流是否出现倒灌现象;如果vs电压不存在负电压,说明电感电流会出现倒灌现象,而且倒灌电流给节点寄生电容充电,节点电压vs开始上升,则整流电路为fccm控制方式;但是当输出负载电流很小时,倒灌电流也会很小,导致节点电压vs上升斜率很小,因此节点电压vs上升到等于输入电压vin所需要的时间会较长,导致高侧过零检测电路(008)的输出信号v2从低电平翻转为高电平的时间晚于设定延时电路模块010输出的控制信号h_fd,由于整流电路系统工作频率的限制,因此需要对节点电压vs上升时间进行一个限定,设定延时电路模块010对输入信号vpwm延时根据系统频率不同设定的ts=200ns,输出控制信号h_fd,sr触发器sr2的复位信号是由输入信号vpwm决定的,控制信号h_fd经过三输入或门or、高压电平移位电路(002)和驱动级电路(003)中的高侧驱动电路gh变为功率管mh开启的栅极控制信号vgh;
15.进一步地,所述电流过零检测电路(007)中的mp1、mp2、mp3和mp4均为低压pmos管,mn1、mn2、mn3、mn4和mn5均为低压nmos管,mnh1为高压nmos管。
16.进一步地,所述高侧过零检测电路(008)中的mp5为低压pmos管,mn6和mn7均为低压nmos管,mnh2为高压nmos管。
17.与现有技术相比,本发明具有如下优点和显著效果:
18.(1)本发明通过电流过零检测电路007和高侧过零检测电路008对节点电压vs进行检测和输出控制信号,使得电路可以根据输入电压vin和负载电流的变化自适应调整死区时间,相比于现有技术方案,其适用范围更广。
19.(2)本发明通过电流过零检测电路007可以根据输入电压vin和负载电流的变化自动地调整ccm和fccm控制方式,从而实现ccm控制方式下低二极管导通损耗和fccm模式下功率管mh的软开启以避免开关损耗,因此显著提高了功率转换效率。
20.(3)本发明在轻载条件下实现功率管mh的软开启,显著降低了dv/dt对高压电平移位电路002的影响,提高了电路的可靠性。
附图说明
21.图1是现有技术提供的一种固定死区电路结构示意图;
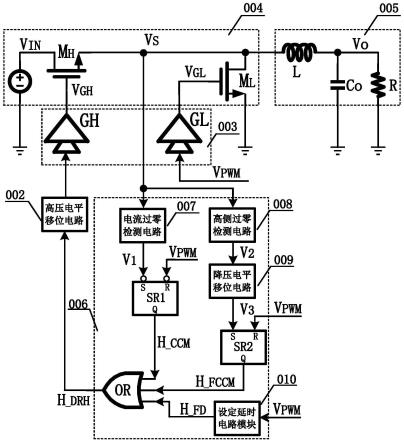
22.图2是本发明提出的一种轻载条件下的高侧软开关电路结构示意图;
23.图3是图2中电流过零检测电路007的一种实施电路;
24.图4是图2中高侧过零检测电路008的一种实施电路;
25.图5是现有技术提供的固定死区产生电路的工作波形图;
26.图6是本发明在设定延时范围内的ccm和fccm控制的工作波形对比图;
27.图7是本发明在设定延时范围内fccm控制和超出设定延时范围fccm控制的工作波形对比图。
具体实施方式
28.以下将结合附图对本发明实施例中的技术方案进行清楚、完整地描述。
29.参看图2,为本发明所提出的一种降压同步整流电路轻载条件下的高侧软开关控制系统结构示意图。本发明在图1现有技术的基础上,去除了固定死区产生电路001,设置了高侧死区控制电路006。高侧死区控制电路006包括电流过零检测电路007、高侧过零检测电
路008、降压电平移位电路009、设定延时电路模块010以及低电平有效的sr触发器sr1和高电平有效的sr触发器sr2。在高侧死区控制电路006中,除电流过零检测电路007和高侧过零检测电路008外,降压电平移位电路009、设定延时电路模块010和sr触发器sr1、sr2以及三输入或门or均可采用现有技术。高侧死区控制电路006主要通过电流过零检测电路007、高侧过零检测电路008和降压电平移位电路009等相互配合共同实现根据输入电压vin和负载电流的变化自动地调整ccm和fccm控制方式,从而实现ccm控制方式下低二极管导通损耗和fccm模式下功率管mh的软开启以避免开关损耗,因此显著提高了功率转换效率。
30.电流过零检测电路007的输入端和高侧过零检测电路008的输入端均连接浮动地电压vs,电流过零检测电路(007)输出控制信号v1连接sr触发器sr1的置位输入端s,sr触发器sr1的复位输入端r连接输入信号vpwm,sr触发器sr1的输出端q输出信号h_ccm连接三输入或门or的一个输入端;高侧过零检测电路(008)输出控制信号v2连接降压电平移位电路(009)的输入端,降压电平移位电路009输出控制信号v3连接sr触发器sr2的置位输入端s,sr触发器sr2的复位输入端r连接输入信号vpwm,sr触发器sr2的输出端q输出信号h_fccm连接三输入或门or的另一个输入端;设定延时电路模块(010)的输入端连接输入信号vpwm,设定延时电路模块(010)的输出连接三输入或门or的第三个输入端,三输入或门or输出信号h_drh作为高压电平移位电路002的输入信号。
31.高侧死区控制电路006的工作原理:在功率管mh还未开启且功率管ml关断后,通过电流过零检测电路007检测vs电压是否存在负电压来判断电感电流是否出现倒灌现象,从而判断该整流电路是ccm控制方式还是fccm控制方式,然后通过后续两条不同环路分别对功率管mh进行先后不同时间点的控制开启,从而保证该电路在宽负载范围内稳定可靠且高效率的运行。电流过零检测电路007的输出信号v1是vs电压是否存在负电压的一个判断信号,即ccm控制和fccm控制的一个判断信号,同时也是ccm控制的检测信号。若vs电压存在负电压,说明功率管ml的体二极管在进行续流作用,电感电流不会出现倒灌现象,则该整流电路需进行ccm控制方式。当vs电压存在负电压时,电流过零检测电路007的输出控制信号v1会从高电平翻转为低电平,将其控制信号v1的下降边沿作为sr触发器的置位信号,sr触发器的复位信号是由输入信号vpwm决定的。控制信号v1通过后续处理电路就变为功率管mh开启的栅极控制信号vgh。若vs电压不存在负电压,说明电感电流会出现倒灌现象,而且倒灌电流给节点寄生电容充电,节点电压vs开始上升,则该整流电路需进行fccm控制方式。高侧过零检测电路008将检测节点电压vs是否被充电到等于输入电压vin,当节点电压vs等于输入电压vin时,高侧过零检测电路008的输出信号v2从低电平翻转为高电平,高压域的控制信号v2经过降压电平移位电路009转换为低压域的控制信号v3,将其控制信号v3的上升边沿作为sr触发器的置位信号,sr触发器的复位信号是由输入信号vpwm决定的。控制信号v3通过后续处理电路就变为功率管mh开启的栅极控制信号vgh。
32.ccm控制过程如下:当输出为重载条件下,输出负载电流很大,电感电流不存在倒灌现象。在功率管mh还未开启且功率管ml关断后,电流过零检测电路007通过检测vs电压是否存在负电压来判断电感电流是否出现倒灌现象;如果vs电压存在负电压,说明是功率管ml的体二极管在进行续流作用,因此电感电流不会出现倒灌现象,则该整流电路为ccm控制方式;电流过零检测电路007会检测功率管ml的体二极管续流时负电压vs的下降边沿作为控制功率管mh开启的控制信号v1,输入信号vpwm连接sr触发器的复位端r,作为控制功率管
mh关闭的控制信号。sr触发器输出端q输出控制信号h_ccm经过或门逻辑电路、高压电平移位电路002和驱动级电路003中的高侧驱动电路gh变为功率管mh的栅极控制信号vgh。
33.fccm控制过程1如下:当输出为轻载条件下,输出负载电流较小,电感电流会存在倒灌现象。在功率管mh还未开启且功率管ml关断后,电流过零检测电路007通过检测vs电压是否存在负电压来判断电感电流是否出现倒灌现象。如果vs电压不存在负电压,说明电感电流会出现倒灌现象,而且倒灌电流给节点寄生电容充电,节点电压vs开始上升,则该整流电路为fccm控制方式。高侧过零检测电路008将检测节点电压vs是否被充电到大于输入电压vin,同时将检测节点电压vs等于输入电压vin时对应的上升边沿作为控制功率管mh开启的控制信号v2,该高压域的置位信号v2经过降压电平移位电流电路009转换为低压域的控制信号v3,输入信号vpwm连接sr触发器的复位端r,作为控制功率管mh关闭的控制信号。sr触发器的输出端q输出控制信号h_fccm经过或门逻辑电路、高压电平移位电路002和驱动级电路003中的高侧驱动电路gh变为功率管mh的栅极控制信号vgh。
34.fccm控制过程2如下:当输出为轻载条件下,输出负载电流很小,即节点电压vs上升到输入电压vin所需时间大于200ns(根据系统频率不同设定)对应的负载电流,电感电流会存在倒灌现象。在功率管mh还未开启且功率管ml关断后,电流过零检测电路007通过检测vs电压是否存在负电压来判断电感电流是否出现倒灌现象。如果vs电压不存在负电压,说明电感电流会出现倒灌现象,而且倒灌电流给节点寄生电容充电,节点电压vs开始上升,则该整流电路为fccm控制方式。但是当输出负载电流很小时,倒灌电流也会很小,导致节点电压vs上升斜率很小,因此节点电压vs上升到等于输入电压vin所需要的时间会较长,导致高侧过零检测电路008的输出信号v2从低电平翻转为高电平的时间较晚(晚于设定延时电路模块010输出的控制信号h_fd)。由于整流电路系统工作频率的限制,因此需要对节点电压vs上升时间进行一个限定。设定延时电路模块010对输入信号vpwm延时ts=200ns(根据系统频率不同设定)输出控制信号h_fd,sr触发器的复位信号是由输入信号vpwm决定的。控制信号h_fd经过或门逻辑电路、高压电平移位电路002和驱动级电路003中的高侧驱动电路gh变为功率管mh开启的栅极控制信号vgh。
35.参看图3,电流过零检测电路007包括一个恒流源idc1、四个低压pmos管mp1、mp2、mp3和mp4、五个低压nmos管mn1、mn2、mn3、mn4和mn5以及一个高压nmos管mnh1。恒流源idc1的输入端连接芯片电源电压vcc,恒流源idc1的输出端连接nmos管mn1的漏极和栅极以及nmos管mn2和nmos管mn3的栅极;nmos管mn1的源极和nmos管mn2的源极均连接芯片逻辑地,nmos管mn2的漏极连接pmos管mp1的漏极和栅极以及pmos管mp2的栅极和nmos管mp3的栅极,pmos管mp1的源极和pmos管mp2的源极均连接芯片电源vcc,pmos管mp2的漏极连接nmos管mn3的漏极和nmos管mn4的栅极;nmos管mn3的源极连接高压nmos管mnh1的源极,高压nmos管mnh1的漏极连接节点电压vs,高压nmos管mnh1的栅极连接输入信号vpwm;pmos管mp3和pmos管mp4的源极均连接芯片电源电压vcc,pmos管mp3的漏极、pmos管mp4的栅极、nmos管mn4的漏极和nmos管mn5的栅极彼此相连接,nmos管mn4的源极和nmos管mn5的源极均连接芯片逻辑地,pmos管的mp4的漏极和nmos管mn5的漏极相连接作为电流过零检测电路007的输出端输出控制信号v1。
36.电流过零检测电路007的工作原理:在ccm控制方式下,vs电压的有三个阶段的变换过程,第一个阶段是初始条件vs电压不为负电压即零电压,第二个阶段由于功率管ml体
二极管的续流作用,vs电压变成负电压,第三个阶段功率管mh开启后vs电压上升,最终等于输入电压vin,此时vs电压不为负电压。在vs不为负电压时,pmos管mp2上拉电流能力大于nmos管mn3的下拉电流能力,使得这两个mos管的中间电位vx被上拉到等于vcc电压,由于pmos管mp3的栅极偏置在固定电位,此时nmos管mn4的下拉电流能力大于pmos管mp3的上拉电流能力,使得这两个mos管的中间电位vy被下拉到接近逻辑地,最后经过由pmos管mp4和nmos管mn5组成的反相器得到输出控制信号v1为高电平。由于功率管ml体二极管的续流作用vs变为负电压时,vx电位也被下拉到负电压,此时nmos管mn4处于关闭状态,vy电位被pmos管mp3上拉到接近芯片电源电压vcc,经过由pmos管mp4和nmos管mn5组成的反相器得到输出控制信号v1翻转为低电平。最后当vs变成不为负电压时,电流过零检测电路007输出控制信号v1翻转为高电平。同理,在fccm控制方式下,vs电压一直不为负电压,因此电流过零检测电路007输出控制信号v1一直为高电平。其中利用高压管mnh1的体二极管的耐压作用,以防高压域的vs电压对上面低压管造成影响。
37.参看图4,高侧过零检测电路008包括一个恒流源idc2,一个低压pmos管mp5,两个低压nmos管mn6和mn7,一个高压nmos管mnh2和一个比较器cmp;恒流源idc2的上端连接芯片浮动电源vb,恒流源idc2的下端连接nmos管mn6的漏极和栅极以及nmos管mn7的栅极;nmos管mn6的源极和nmos管mn7的源极均连接浮动地vs,nmos管mn7的漏极与pmos管mp5的栅极和漏极、比较器cmp的异相端和高压nmos管mnh2的源极相连接,高压nmos管mnh2的栅极和比较器cmp的同相端均连接浮动地vs,高压nmos管mnh2的漏极连接输入电压vin;pmos管mp5的源极连接芯片浮动电源vb,比较器cmp的输出端作为高侧过零检测电路008的输出端输出控制信号v2。
38.高侧过零检测电路008的工作原理:在初始条件下,浮动地电位vs等于芯片逻辑地,浮动电源vb等于芯片电源电压vcc。电压vz由恒流源idc2和二极管连接的pmos管mp5偏置在接近vcc的高电位,此时vz电压大于vs电压,因此比较器cmp的输出即高侧过零检测电路008输出控制信号v2为低电平。当功率管mh的体二极管进行续流时,此时浮动地电位vs从芯片逻辑地变为大于输入电压vin,nmos管mn7进行续流作用,vz电位变为负电压,此时vz电压小于vs电压,因此比较器cmp的输出即高侧过零检测电路008输出控制信号v2翻转为高电平。当电路稳定后,浮动地电位vs从芯片逻辑地变为大于输入电压vin,高压nmos管mnh2的体二极管开始导通,vz-vs电位就变为高压nmos管mnh2的体二极管的正向导通压降0.7v左右,此时vz电压大于vs电压,因此比较器cmp的输出即高侧过零检测电路008输出控制信号v2翻转为低电平。
39.参看图5,为现有技术提供的固定死区产生电路的工作波形图。从两种不同的负载电流对应不同vs斜率可以看出,在固定死区产生电路功率管mh还未开启且功率管ml关断后,若vs斜率较小时,固定死区会使功率管mh的开启产生较大的开关损耗;若vs斜率较大时,固定死区会使功率管mh的体二极管续流产生较大的二极管导通损耗。因此固定死区产生电路严重影响整流电路的功率转换效率,这在gan功率管的高频应用中尤其严重。
40.参看图6,为本发明在设定延时范围内的ccm控制和fccm控制的工作波形对比图,图中左侧部分为ccm控制的工作波形图,图中右侧部分为fccm控制的工作波形图。从ccm控制的左侧部分工作波形图看出,电感电流il一直大于零,在0-t0时刻,vgh为低电平且vgl为高电平,即功率管mh处于关断状态,功率管ml处于导通续流状态,由于功率管ml的导通压降
很小,此时节点电压vs近似等于零电位(不为负电压),那么电流过零检测电路007输出控制信号v1为高电平;在t0-t1时刻,vgh和vgl均为低电平,即功率管mh和功率管ml均处于关断状态,则功率管ml的体二极管进行续流作用,此时节点电压vs翻转为负电压,那么电流过零检测电路007输出控制信号v1翻转为低电平,该下降边沿作为ccm控制方式下的检测信号经传输延时ts1变为功率管mh的驱动信号vgh的上升边沿;在t1-t2时刻,vgh为高电平且vgl为低电平,即功率管mh处于导通状态,功率管ml处于关断状态,此时节点电压vs(不为负电压)开始上升最终等于输入电压vin,那么电流过零检测电路007输出控制信号v1翻转为高电平。从fccm控制的右侧部分工作波形图看出,电感电流il存在小于零的情况,在t3-t4时刻,vgh为低电平且vgl为高电平,即功率管mh处于关断状态,功率管ml处于导通续流状态,由于功率管ml的导通压降近似为零,说明节点电压vs约等于零电位,此时vz电位偏置在接近vcc的高电位,那么vz电压大于vs电压,因此比较器cmp的输出即高侧过零检测电路008的输出控制信号v2为低电平,控制信号v2经过降压电平移位电路009变为控制信号v3为低电平。在t4-t5时刻,vgh和vgl均为低电平,即功率管mh和功率管ml均处于关断状态,由于电感电流出现倒灌现象(电流小于零),而且倒灌电流给节点寄生电容充电,节点电压vs开始上升但还小于输入电压vin,那么高侧过零检测电路008输出控制信号v2经过降压电平移位电路009变为控制信号v3仍然为低电平;在t5-t6时刻,vgh和vgl均为低电平,即功率管mh和功率管ml均处于关断状态,由于倒灌电流继续给节点寄生电容充电,且功率管mh的体二极管开始进行续流作用,节点电压vs开始上升到大于输入电压vin时,高侧过零检测电路008中的nmos管mn7也进行续流作用,vz电位变为负电压,此时vz电压小于vs电压,因此比较器cmp的输出即高侧过零检测电路008输出控制信号v2翻转为高电平,控制信号v2经过降压电平移位电流009变为控制信号v3翻转为高电平。该上升边沿作为fccm控制方式下的检测信号经传输延时ts2变为功率管mh的驱动信号vgh的上升边沿;在t6-t7时刻,vgh为高电平且vgl为低电平,即功率管mh处于导通状态,功率管ml处于关断状态,浮动地电位vs变为等于输入电压vin,高压nmos管mnh2的体二极管开始导通,vz-vs电位就变为高压nmos管mnh2的体二极管的正向导通压降0.7v左右,此时vz电压大于vs电压,因此比较器cmp的输出即高侧过零检测电路008输出控制信号v2翻转为低电平,控制信号v2经过降压电平移位电路009变为控制信号v3翻转为低电平。
41.参看图7,为本发明在设定延时范围内fccm控制和超出设定延时范围fccm控制的的工作波形对比图,图中左侧部分为fccm控制(设定延时范围内)的工作波形图,图中右侧部分为fccm控制(超出设定延时范围)的工作波形图。图中左侧部分fccm控制(设定延时范围内)的工作波形图原理分析与图6右侧部分fccm控制的工作波形图相同,在此不再赘述。从fccm控制(超出设定延时范围)的右侧部分工作波形图看出,当电感电流倒灌电流很小时,节点电压vs上升斜率很小,导致节点电压vs上升到等于输入电压vin所需要的时间很长,这严重限制了整流电路的系统工作频率,因此需要对节点电压vs的上升时间进行一个的限定。设定延时电路模块010对输入信号vpwm延时ts=200ns(根据系统频率来设定)。在t3-t4时刻,与图6的t3-t4时刻原理分析相同,在此不再赘述。在t4-t5时刻,与图6的t4-t5时刻原理分析相同,唯一不同的是,由于电感电流倒灌为小电流,节点电压vs经过设定延时ts后还未达到输入电压vin,此时vz电压大于vs电压,因此比较器cmp的输出即高侧过零检测电路008输出控制信号v2仍然为低电平,控制信号v2经过降压电平移位电路009变为控制
信号v3仍然为低电平。在t5-t6时刻,此时设定延时电路模块的输出控制信号h_fd从低电平翻转为高电平,此上升边沿作为fccm控制方式下(超出设定延时范围)的检测信号经传输延时ts3变为功率管mh的驱动信号vgh的上升边沿,传输延时等于ts3,当驱动信号vgh翻转高电平时,节点电压vs就很快被上拉到等于输入电压vin。在t6-t7时刻,vgh为高电平且vgl为低电平,即功率管mh处于导通状态,功率管ml处于关断状态,浮动地电位vs变为等于输入电压vin,高压nmos管mnh2的体二极管开始导通,vz-vs电位就变为高压nmos管mnh2的体二极管的正向导通压降0.7v左右,此时vz电压大于vs电压,因此比较器cmp的输出即高侧过零检测电路008输出控制信号v2仍然为低电平,控制信号v2经过降压电平移位电路009变为控制信号v3仍然为低电平。
42.以上对本发明所提供的一种降压同步整流电路轻载条件下的高侧软开关控制系统实施例进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,但任何在本发明思想下所作之改变,均应在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1