旋转机械控制装置的制作方法
1.本公开涉及控制旋转机械的旋转机械控制装置。
背景技术:
2.以往,作为同步旋转机械(同步电机)的驱动方法,已知有利用了直接转矩控制(dtc:direct torque control)的无位置传感器磁通控制运转。
3.例如,记载有利用了非专利文献1、非专利文献2的直接转矩控制、以及专利文献1的磁通的旋转机械控制装置的一个例子。
4.并且,例如,在专利文献2中记载有,用于改善采用了直接转矩控制的旋转机械控制装置的启动期间(包括启动时刻的期间)中的稳定性的描述。
5.(现有技术文献)
6.(专利文献)
7.专利文献1:日本专利第6473992号公报
8.专利文献2:日本专利第6414771号公报
9.(非专利文献)
10.非专利文献1:井上征則、森本茂雄、真田雅之、“埋込磁石同期
モータの
直接
トルク
制御
によるセンサレス
駆動
とトルク
応答改善法(improvement of torque response and examination of sensorless drive system based on direct torque control for ipmsm)“电气学会论文志c,128卷,1号,p.78-86(2008年)
11.非专利文献2:井上達貴、井上征則、森本茂雄、真田雅之、“電機子鎖交磁束
に
同期
した
座標系
における
pmsm
の
最大
トルク
/電流制御
の
数式
モデルと
制御手法(mathematical model and control method of maximum torque per ampere for pmsm in stator flux linkage synchronous frame)”电气学会论文志d,135卷,6号,p.689-696(2015年)
12.希望进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
技术实现要素:
13.于是,本公开的目的在于,提供能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性的旋转机械控制装置。
14.本公开的一个形态所涉及的旋转机械控制装置,具备:磁通估计部,估计旋转机械磁通,该旋转机械磁通是同步旋转机械的磁通;指令振幅确定部,通过执行利用了第1内积或第2内积的反馈控制,从而生成指令振幅,该指令振幅是指令磁通的振幅,所述第1内积是被估计的所述旋转机械磁通即估计磁通与所述同步旋转机械的检测电流的内积,所述第2内积是所述同步旋转机械的永久磁铁的被估计的磁铁磁通与所述检测电流的内积;指令磁通确定部,根据所述指令振幅生成所述指令磁通;以及切换部,控制从电流同步运转向磁通控制运转的切换,所述电流同步运转是以不依赖于所述估计磁通的相位的方式,将启动所
述同步旋转机械所需要的规定的同步电流提供给所述同步旋转机械的运转,所述磁通控制运转是以所述估计磁通成为所述指令磁通确定部中生成的所述指令磁通的方式进行控制的运转,所述磁通估计部,在由所述切换部控制向所述磁通控制运转的切换时,将切换到所述磁通控制运转之前的所述估计磁通的振幅作为刚切换到所述磁通控制运转时的所述指令振幅的初始值提供给所述反馈控制。
15.本公开的一个形态所涉及的旋转机械控制装置,具备:磁通估计部,估计旋转机械磁通,该旋转机械磁通是同步旋转机械的磁通;误差变量确定部,计算第1内积或第2内积,所述第1内积是被估计的所述旋转机械磁通即估计磁通与所述同步旋转机械的检测电流的内积,所述第2内积是所述同步旋转机械的永久磁铁的被估计的磁铁磁通与所述检测电流的内积;以及切换部,控制从电流同步运转向磁通控制运转的切换,所述电流同步运转是以不依赖于所述估计磁通的相位的方式,将启动所述同步旋转机械所需要的规定的同步电流提供给所述同步旋转机械的运转,所述磁通控制运转是以所述估计磁通成为指令磁通的方式进行控制的运转,所述切换部,在进行所述电流同步运转时由所述误差变量确定部求出的所述第1内积或所述第2内积的绝对值成为规定值以下的情况下,或者,在从所述电流同步运转的开始时经过了第1规定期间的情况下,进行从所述电流同步运转向所述磁通控制运转的切换,所述第1规定期间是根据预先决定的所述同步旋转机械的加速率以及切换转速而求出的期间。
16.根据本公开的一个形态所涉及的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
附图说明
17.图1是实施方式1所涉及的旋转机械控制装置的方框图。
18.图2是用于说明dq坐标系以及αβ坐标系的图。
19.图3是实施方式1所涉及的电流同步控制部的方框图。
20.图4是实施方式1所涉及的无位置传感器控制部的方框图。
21.图5是用于说明执行电流同步运转时的估计磁通的确定方法的图。
22.图6a是实施方式1所涉及的误差变量确定部的方框图。
23.图6b是实施方式1所涉及的误差变量确定部的方框图。
24.图7是实施方式1所涉及的指令振幅确定部的方框图。
25.图8是实施方式1所涉及的切换部的结构图。
26.图9是实施方式2所涉及的旋转机械控制装置的方框图。
27.图10是实施方式2所涉及的磁通同步控制部的方框图。
28.图11是实施方式2所涉及的指令相位确定部的方框图。
29.图12是实施方式2所涉及的指令相位确定部的方框图。
30.图13是实施方式2所涉及的指令相位确定部的方框图。
31.图14是实施方式2所涉及的指令相位确定部的方框图。
32.图15是实施方式3所涉及的旋转机械控制装置的方框图。
33.图16是实施方式3所涉及的磁通同步/无位置传感器控制部的方框图。
34.图17是实施方式3所涉及的指令相位确定部的方框图。
35.图18是实施方式3所涉及的指令相位确定部的方框图。
36.图19是实施方式4所涉及的旋转机械控制装置的方框图。
37.图20是实施方式4所涉及的无位置传感器控制部的方框图。
38.图21是用于说明dq坐标系、αβ坐标系、以及γδ坐标系的图。
39.图22是示出从γ轴看时的d轴的超前角与同步旋转机械的实际转矩的关系的相关图。
40.图23是示出实施方式4所涉及的工作模式切换判断部输出切换控制信号的定时的时间图的一个例子。
41.图24是示出实施方式4所涉及的工作模式切换判断部输出切换控制信号的定时的时间图的一个例子。
42.图25是示出实施方式4所涉及的工作模式切换判断部输出切换控制信号的定时的时间图的一个例子。
具体实施方式
43.(得到本公开的一个形态的经过)
44.作为同步旋转机械的高速旋转域的控制,能够采用非专利文献1所记载的直接转矩控制等主要利用了磁通的磁通控制运转。在该控制中,估计施加到同步旋转机械的磁通,指令磁通与估计的估计磁通的差(向量差)越大,则向同步旋转机械施加的电压越大。
45.并且,作为同步旋转机械的稳定的起动方法,已知有利用了电流控制的电流同步运转。
46.作为这些组合的控制,在专利文献1中提出了,从电流同步运转(起动时)切换到磁通控制运转(高速旋转时)时产生的电压浪涌的抑制方法。
47.另一方面,希望进一步抑制上述电压浪涌。
48.于是,本发明者们为了进一步抑制上述电压浪涌,而专门重复进行了实验、研究。其结果为,发明者们得到如下知识,即,构成使指令磁通的振幅与目标磁通的振幅一致的反馈控制,在从电流同步运转切换到磁通控制运转时,进行将切换前的电流同步运转时估计的估计磁通设定为指令磁通的初始值的反馈控制,从而能够进一步抑制上述浪涌电压。
49.并且,发明者们得到如下知识,即,通过插入磁通同步运转,从而能够进一步抑制上述浪涌电压,在磁通同步运转中,利用指令速度,按每个控制周期确定估计磁通的相位应该移动的移动量,利用确定的移动量和估计磁通的相位确定指令磁通的相位,根据确定的指令磁通的相位进行磁通控制。
50.并且,发明者们得到如下知识,即,求出估计磁通与同步旋转机械的检测电流的第1内积、或磁铁磁通与同步旋转机械的检测电流的第2内积来计算无效功率成分,在计算出的无效功率成分的绝对值成为规定值以下的定时,从电流同步运转切换到磁通控制运转,从而能够抑制切换时的实际转矩低于低于负载转距,因此,能够抑制切换后的磁通控制运转中的失步。
51.并且,发明者们得到如下知识,即,在同步旋转机械的感应电压上升到足够高的电压的定时从电流同步运转切换到磁通控制运转,从而能够高精度地进行切换后的磁通控制运转,因此,能够抑制切换后的磁通控制运转中的失步。
52.本发明者们,根据这些知识进一步重复进行实验、研究后,想到了下述旋转机械控制装置。
53.本公开的一个形态所涉及的旋转机械控制装置,具备:磁通估计部,估计旋转机械磁通,该旋转机械磁通是同步旋转机械的磁通;指令振幅确定部,通过执行利用了第1内积或第2内积的反馈控制,从而生成指令振幅,该指令振幅是指令磁通的振幅,所述第1内积是被估计的所述旋转机械磁通即估计磁通与所述同步旋转机械的检测电流的内积,所述第2内积是所述同步旋转机械的永久磁铁的被估计的磁铁磁通与所述检测电流的内积;指令磁通确定部,根据所述指令振幅生成所述指令磁通;以及切换部,控制从电流同步运转向磁通控制运转的切换,所述电流同步运转是以不依赖于所述估计磁通的相位的方式,将启动所述同步旋转机械所需要的规定的同步电流提供给所述同步旋转机械的运转,所述磁通控制运转是以所述估计磁通成为所述指令磁通确定部中生成的所述指令磁通的方式进行控制的运转,所述磁通估计部,在由所述切换部控制向所述磁通控制运转的切换时,将切换到所述磁通控制运转之前的所述估计磁通的振幅作为刚切换到所述磁通控制运转时的所述指令振幅的初始值提供给所述反馈控制。
54.根据上述结构的旋转机械控制装置,在从电流同步运转向磁通控制运转的切换时,能够使切换到磁通控制运转之前的估计磁通的振幅、与切换后的指令磁通的振幅即指令振幅一致。
55.因此,根据上述结构的旋转机械控制装置,能够抑制从电流同步运转向磁通控制运转的切换时产生的电压浪涌。
56.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
57.并且,也可以还具备:转矩估计部,根据所述检测电流以及所述估计磁通计算估计转矩;以及指令相位确定部,计算用于使所述估计转矩收敛于指令转矩的转矩相位,所述指令磁通确定部,利用所述指令振幅、以及所述指令相位确定部根据所述估计磁通的相位而计算出的所述转矩相位,生成所述指令磁通,所述旋转机械控制装置,执行根据所述指令磁通进行的无位置传感器磁通控制运转,以作为所述磁通控制运转。
58.据此,能够执行无位置传感器磁通控制运转,以作为磁通控制运转。
59.并且,也可以是,所述指令磁通确定部,(1)利用针对所述同步旋转机械的指令速度,按每个控制周期确定所述估计磁通的相位应该移动的移动量,(2)利用确定的所述移动量以及所述估计磁通的相位确定指令磁通向量相位,所述旋转机械控制装置,根据所述指令磁通向量相位,执行磁通同步运转,以作为所述磁通控制运转。
60.据此,在从电流同步运转向磁通控制运转的切换时,能够使切换到磁通控制运转之前的估计磁通的相位、与切换后的指令磁通的相位一致。
61.因此,根据上述结构的旋转机械控制装置,能够更抑制从电流同步运转向磁通控制运转的切换时产生的电压浪涌。
62.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
63.并且,也可以是,在所述旋转机械控制装置,从所述电流同步运转向所述无位置传感器磁通控制运转转移时,所述指令磁通确定部,(1)利用针对所述同步旋转机械的指令速
度,按每个控制周期确定所述估计磁通的相位应该移动的移动量,(2)利用确定的所述移动量以及所述估计磁通的相位确定指令磁通向量相位,所述旋转机械控制装置,(3)插入磁通同步运转,该磁通同步运转是根据所述指令磁通向量相位被执行为所述磁通控制运转的运转。
64.据此,在从电流同步运转切换到无位置传感器磁通控制运转时,能够抑制同时产生指令磁通的振幅的变动和相位的变动。
65.因此,根据上述结构的旋转机械控制装置,能够更抑制从电流同步运转向无位置传感器磁通控制运转的切换时产生的电压浪涌。
66.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
67.并且,也可以是,所述指令振幅确定部,将所述第1内积或所述第2内积的计算结果的目标值设定为零以上。
68.据此,能够使产生同步旋转机械的永久磁铁的磁铁磁通的方向的励磁磁通的电流流动。因此,得到与使永久磁铁磁化的效果等价的效果。
69.并且,也可以还具备计算所述第1内积或所述第2内积的误差变量确定部,所述切换部,在进行所述电流同步运转时由所述误差变量确定部求出的所述第1内积或所述第2内积的绝对值成为规定值以下的情况下,或者,在从所述电流同步运转的开始时经过了第1规定期间的情况下,进行从所述电流同步运转向所述磁通控制运转的切换,所述第1规定期间是根据预先决定的所述同步旋转机械的加速率以及切换转速而求出的期间。
70.根据上述结构的旋转机械控制装置能够,在根据第1内积或第2内积而求出的无效功率成分的绝对值成为规定值以下的定时从电流同步运转切换到磁通控制运转。因此,根据上述结构的旋转机械控制装置,能够抑制切换时的实际转矩低于负载转距。据此,能够抑制切换后的磁通控制运转中的失步。
71.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
72.或者,根据上述结构的旋转机械控制装置能够,在由于从电流同步运转的开始时经过了第1规定时间,而同步旋转机械的感应电压上升到能够高精度地进行切换后的磁通控制运转的电压的定时,从电流同步运转切换到磁通控制运转。因此,根据上述结构的旋转机械控制装置,能够高精度地进行切换后的磁通控制运转。据此,能够抑制切换后的磁通控制运转中的失步。
73.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
74.并且,所述规定值也可以是零。
75.在无效功率成分的绝对值为零的定时,实际转矩成为最大。
76.因此,能够进一步有效地改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
77.并且,也可以是,所述切换部,在从所述电流同步运转的开始时的第2规定期间以内由所述误差变量确定部求出的所述第1内积或所述第2内积的绝对值成为所述规定值以下的情况下,禁止从所述电流同步运转向所述磁通控制运转的切换,所述第2规定期间比所
述第1规定期间短。
78.即使在无效功率成分的绝对值成为规定值以下的情况下,在同步旋转机械的感应电压没有上升到足够高的电压时,有时也不能高精度地进行切换后的磁通控制运转。
79.根据上述结构的旋转机械控制装置,即使在无效功率成分的绝对值成为规定值以下的情况下,在同步旋转机械的感应电压没有上升到足够高的电压时,也能够禁止从电流同步运转向磁通控制运转的切换。因此,根据上述结构的旋转机械控制装置,能够抑制因同步旋转机械的感应电压没有上升到足够高的电压而引起的、不能高精度地进行切换后的磁通控制运转的现象的发生,因此,能够高精度地进行切换后的磁通控制运转。据此,能够抑制切换后的磁通控制运转中的失步。
80.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
81.并且,也可以是,所述切换部,在所述电流同步运转的执行中由所述误差变量确定部求出的所述第1内积或所述第2内积的绝对值没有成为所述规定值以下、且经过了所述第1规定期间的情况下,进行从所述电流同步运转向所述磁通控制运转的切换。
82.根据上述结构的旋转机械控制装置,在由于从电流同步运转的开始时经过了第1规定时间,而同步旋转机械的感应电压上升到能够高精度地进行切换后的磁通控制运转的电压的定时,从电流同步运转切换到磁通控制运转。因此,根据上述结构的旋转机械控制装置,能够高精度地进行切换后的磁通控制运转。据此,能够抑制切换后的磁通控制运转中的失步。
83.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
84.本公开的一个形态所涉及的旋转机械控制装置,具备:磁通估计部,估计旋转机械磁通,该旋转机械磁通是同步旋转机械的磁通;误差变量确定部,计算第1内积或第2内积,所述第1内积是被估计的所述旋转机械磁通即估计磁通与所述同步旋转机械的检测电流的内积,所述第2内积是所述同步旋转机械的永久磁铁的被估计的磁铁磁通与所述检测电流的内积;以及切换部,控制从电流同步运转向磁通控制运转的切换,所述电流同步运转是以不依赖于所述估计磁通的相位的方式,将启动所述同步旋转机械所需要的规定的同步电流提供给所述同步旋转机械的运转,所述磁通控制运转是以所述估计磁通成为指令磁通的方式进行控制的运转,所述切换部,在进行所述电流同步运转时由所述误差变量确定部求出的所述第1内积或所述第2内积的绝对值成为规定值以下的情况下,或者,在从所述电流同步运转的开始时经过了第1规定期间的情况下,进行从所述电流同步运转向所述磁通控制运转的切换,所述第1规定期间是根据预先决定的所述同步旋转机械的加速率以及切换转速而求出的期间。
85.根据上述结构的旋转机械控制装置能够,在根据第1内积或第2内积而求出的无效功率成分的绝对值成为规定值以下的定时从电流同步运转切换到磁通控制运转。因此,根据上述结构的旋转机械控制装置,能够抑制切换时的实际转矩低于负载转距。据此,能够抑制切换后的磁通控制运转中的失步。
86.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
87.或者,根据上述结构的旋转机械控制装置,在由于从电流同步运转的开始时经过了第1规定时间,而同步旋转机械的感应电压上升到能够高精度地进行切换后的磁通控制运转的电压的定时,从电流同步运转切换到磁通控制运转。因此,根据上述结构的旋转机械控制装置,能够高精度地进行切换后的磁通控制运转。据此,能够抑制切换后的磁通控制运转中的失步。
88.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
89.并且,所述规定值也可以是零。
90.在无效功率成分的绝对值为零的定时,实际转矩成为最大。
91.因此,能够进一步有效地改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
92.并且,也可以是,所述切换部,在从所述电流同步运转的开始时的第2规定期间以内由所述误差变量确定部求出的所述第1内积或所述第2内积的绝对值成为所述规定值以下的情况下,禁止从所述电流同步运转向所述磁通控制运转的切换,所述第2规定期间比所述第1规定期间短。
93.即使在无效功率成分的绝对值成为规定值以下的情况下,在同步旋转机械的感应电压没有上升到足够高的电压时,有时也不能高精度地进行切换后的磁通控制运转。
94.根据上述结构的旋转机械控制装置,即使在无效功率成分的绝对值成为规定值以下的情况下,在同步旋转机械的感应电压没有上升到足够高的电压时,也能够禁止从电流同步运转向磁通控制运转的切换。因此,根据上述结构的旋转机械控制装置,能够抑制因同步旋转机械的感应电压没有上升到足够高的电压而引起的、不能高精度地进行切换后的磁通控制运转的现象的发生,因此,能够高精度地进行切换后的磁通控制运转。据此,能够抑制切换后的磁通控制运转中的失步。
95.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
96.并且,也可以是,所述切换部,在所述电流同步运转的执行中由所述误差变量确定部求出的所述第1内积或所述第2内积的绝对值没有成为所述规定值以下、且经过了所述第1规定期间的情况下,进行从所述电流同步运转向所述磁通控制运转的切换。
97.根据上述结构的旋转机械控制装置,在由于从电流同步运转的开始时经过了第1规定时间,而同步旋转机械的感应电压上升到能够高精度地进行切换后的磁通控制运转的电压的定时,从电流同步运转切换到磁通控制运转。因此,根据上述结构的旋转机械控制装置,能够高精度地进行切换后的磁通控制运转。据此,能够抑制切换后的磁通控制运转中的失步。
98.因此,根据上述结构的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
99.以下,对于本公开的一个形态所涉及的旋转机械控制装置的具体例子,参照附图进行说明。在此所示的实施方式均为示出本公开的一个具体例子。因此,以下的实施方式所示的数值、形状、构成要素、构成要素的配置位置及连接方式、以及步骤(工序)和步骤的顺序等是一个例子,其主旨并非是限定本公开。并且,各个图为示意图,并非严谨的图示。
100.另外,本公开的总括性或具体形态,也可以由系统、方法、集成电路、计算机程序或计算机可读取的cd-rom等的记录介质实现,也可以由系统、方法、集成电路、计算机程序以及记录介质的任意组合实现。
101.(实施方式1)
102.如图1所示,旋转机械控制装置100具备,第1电流传感器105a、第2电流传感器105b、电流同步控制部131、无位置传感器控制部134、切换部133以及占空比生成部103。旋转机械控制装置100,与pwm(pulse widthmodulation)逆变器104以及同步旋转机械102连接。
103.电流同步控制部131被构成为,执行同步旋转机械102的电流同步运转。无位置传感器控制部134被构成为,执行同步旋转机械102的无位置传感器磁通控制运转。电流同步运转是,用于使向同步旋转机械102施加的旋转机械电流的旋转速度(同步速度)与同步旋转机械102的转子的旋转速度(转速)可靠一致的运转。在本实施方式1中,即使在执行无位置传感器磁通控制运转的期间,同步旋转机械102的转子的旋转速度也与同步速度一致。无位置传感器磁通控制运转是,不利用编码器、分相器等的位置传感器的运转。但是,在本实施方式1中,在执行电流同步运转的期间,也不利用位置传感器。在本说明书中,为了便于说明,将不利用估计的旋转机械磁通的相位而控制旋转机械电流的运转称为电流同步运转。将利用估计的旋转机械磁通的相位来控制旋转机械磁通的运转称为磁通控制运转。旋转机械磁通是,包括施加到同步旋转机械102的三相交流坐标上的电枢交链磁通、以及对该电枢交链磁通进行坐标变换而得到的磁通这两者的概念。在本说明书中,有“振幅”仅表示大小(绝对值)的情况。
104.由dsp(digital signal processor)或微型计算机中执行的控制应用能够提供旋转机械控制装置100的一部分或所有的要素。dsp或微型计算机也可以包括,核心、存储器、a/d转换电路以及通信端口等的外围设备。并且,旋转机械控制装置100的一部分或所有的要素也可以由逻辑电路构成。
105.(旋转机械控制装置100的控制的概要)
106.旋转机械控制装置100,根据指令速度ω
ref*
以及相电流iu、iw,生成占空比du、dv、dw。由pwm逆变器104,根据占空比du、dv、dw,生成应该向同步旋转机械102施加的电压向量vu、vv、vw。指令速度ω
ref*
是,从上位控制装置向旋转机械控制装置100提供的。指令速度ω
ref*
表示,同步旋转机械102应该追随的速度。
107.参照图1,说明旋转机械控制装置100的工作的概要。由电流传感器105a、105b(第1电流传感器105a、第2电流传感器105b),检测相电流iu、iw。在执行电流同步运转时,由电流同步控制部131,根据指令速度ω
ref
*以及相电流iu、iw,生成指令电压向量v
1u*
、v
1v*
、v
1w*
。指令电压向量v
1u*
、v
1v*
、v
1w*
的各成分,分别与三相交流坐标上的u相电压、v相电压以及w相电压对应。在执行无位置传感器磁通控制运转时,由无位置传感器控制部134,根据指令速度ω
ref*
以及相电流iu、iw,生成指令电压向量v
2u*
、v
2v*
、v
2w*
。指令电压向量v
2u*
、v
2v*
、v
2w*
的各成分,分别与三相交流坐标上的u相电压、v相电压以及w相电压对应。在执行电流同步运转时,由切换部133,将指令电压向量v
1u*
、v
1v*
、v
1w*
,作为指令电压向量v
u*
、v
v*
、v
w*
来选择,并输出。在执行无位置传感器磁通控制运转时,由切换部133,将指令电压向量v
2u*
、v
2v*
、v
2w*
,作为指令电压向量v
u*
、v
v*
、v
w*
来选择,并输出。由占空比生成部103,根据指令电压向量v
u*
、v
v*
、v
w*
,
生成占空比du、dv、dw。占空比du、dv、dw,被输入到pwm逆变器104。通过这样的控制,同步旋转机械102被控制成,速度追随指令速度ω
ref*
。
108.以下,有时会根据d-q坐标(第1两相坐标)说明旋转机械控制装置100。并且,有时会根据α-β坐标(第2两相坐标)说明旋转机械控制装置100。图2示出d-q坐标以及α-β坐标。α-β坐标是,固定坐标。将α-β坐标,称为静止坐标,也称为交流坐标。α轴被设定为,在与u轴(在图2中省略)相同的方向上延伸的轴。d-q坐标是,旋转坐标。θ是,从u轴看时的d轴的超前角。将θ,也称为转子位置。
109.(电流同步控制部131的控制的概要)
110.电流同步控制部131,执行电流同步运转,即,以不依赖于旋转机械磁通的相位的方式,将启动同步旋转机械102所需要的同步电流提供给同步旋转机械102。
111.如图3所示,电流同步控制部131具备,同步电流指令部124、电压指令确定部(第1电压指令确定部)125、d、q/u、v、w变换部(第1两相三相坐标变换部)126、u、w/d、q变换部(第1三相两相坐标变换部)127以及积分器128。
112.在电流同步控制部131中,由积分器128,根据指令速度ω
ref*
确定转子位置θ。转子位置θ表示,同步旋转机械102的转子的位置。转子位置θ,与转子的永久磁铁的相位对应。由u、w/d、q变换部127,将相电流iu、iw变换为轴电流id、iq(第1轴电流)。在该变换中,利用转子位置θ。轴电流id、iq是,将同步旋转机械102的d-q坐标上的d轴电流id以及q轴电流iq汇总并记载的。由同步电流指令部124,生成指令轴电流i
d*
、i
q*
。指令轴电流i
d*
、i
q*
是,轴电流id、iq应该追随的轴电流。指令轴电流i
d*
、i
q*
是,将同步旋转机械102的d-q坐标上的d轴指令轴电流i
d*
以及q轴指令轴电流i
q*
汇总并记载的。由电压指令确定部125,根据指令轴电流i
d*
、i
q*
以及轴电流id、iq,生成指令轴电压v
d*
、v
q*
(第1轴电压)。指令轴电压v
d*
、v
q*
是,将同步旋转机械102的d-q坐标上的d轴指令轴电压v
d*
以及q轴指令轴电压v
q*
汇总并记载的。由d、q/u、v、w变换部126,将指令轴电压v
d*
、v
q*
变换为指令电压向量v
1u*
、v
1v*
、v
1w*
。在该变换中,利用转子位置θ。在电流同步运转中,通过这样的控制,速度追随指令速度ω
ref*
,轴电流id、iq追随指令轴电流i
d*
、i
q*
。
113.(无位置传感器控制部134的控制的概要)
114.无位置传感器控制部134,执行无位置传感器磁通控制运转,即,以旋转机械磁通的振幅收敛于目标振幅的方式设定指令振幅。无位置传感器磁通控制运转是,在参照根据基于磁通估计部108(后述)估计的旋转机械磁通的相位(估计相位θs)求出的指令相位θ
s*
的同时执行的。目标振幅是,旋转机械磁通的振幅应该最终到达的最终的振幅。指令振幅是,旋转机械磁通的振幅应该追随的振幅。
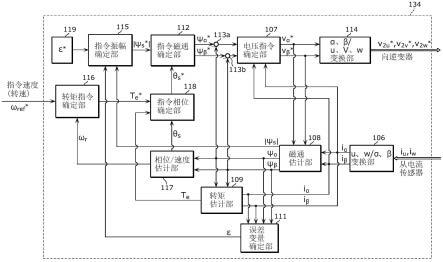
115.如图4所示,无位置传感器控制部134具备,u、w/α、β变换部(第2三相两相坐标变换部)106、电压指令确定部(第2电压指令确定部)107、磁通估计部108、转矩估计部109、相位/速度估计部117、转矩指令确定部116、指令相位确定部118、指令振幅确定部115、目标值设定部119、误差变量确定部111、指令磁通确定部112、α轴磁通偏差运算部113a、β轴磁通偏差运算部113b以及α、β/u、v、w变换部(第2两相三相坐标变换部)114。
116.在无位置传感器控制部134中,由u、w/α、β变换部106,将相电流iu、iw变换为轴电流i
α
、i
β
(第2轴电流)。轴电流i
α
、i
β
是,将同步旋转机械102的α-β坐标上的α轴电流i
α
以及β轴电流i
β
汇总并记载的。由磁通估计部108,估计旋转机械磁通(求出估计磁通ψs)。将估计磁通
ψs的α轴成分以及β轴成分分别记载为估计磁通ψ
α
、ψ
β
。由相位/速度估计部117,根据估计磁通ψs,估计同步旋转机械102的速度以及旋转机械磁通的相位(求出估计速度(转速)ωr以及估计磁通ψs的估计相位θs)。由转矩估计部109,根据估计磁通ψs以及轴电流i
α
、i
β
,估计电机转矩(求出估计转矩te)。由转矩指令确定部116,根据估计速度ωr以及指令速度(转速)ω
ref*
,生成指令转矩t
e*
。指令转矩t
e*
表示,电机转矩应该追随的转矩。由误差变量确定部111,根据估计磁通ψs以及轴电流i
α
、i
β
,生成示出无效功率成分的误差变量ε。由目标值设定部119,设定误差变量ε的目标值。由指令振幅确定部115,执行利用了误差变量ε的反馈控制,从而生成指令振幅|ψ
s*
|。在此,在由后述的切换部133控制从电流同步运转向磁通控制运转(在此,无位置传感器磁通控制运转)的切换时,由磁通估计部108,将切换到磁通控制运转之前的估计磁通的振幅|ψs|,作为刚切换到磁通控制运转时的指令振幅|ψ
s*
|的初始值,提供给上述反馈控制。由指令相位确定部118,根据估计磁通ψs的估计相位θs、指令转矩t
e*
以及估计转矩te求出指令磁通向量ψ
s*
的指令相位θ
s*
。由指令磁通确定部112,根据指令振幅|ψ
s*
|以及指令相位θ
s*
,求出指令磁通向量ψ
s*
。将指令磁通向量ψ
s*
的α轴成分以及β轴成分,分别记载为α轴指令磁通ψ
α*
、β轴指令磁通ψ
β*
。由α轴磁通偏差运算部113a,求出α轴指令磁通ψ
α*
与估计磁通ψ
α
的偏差(磁通偏差)δψ
α
。由β轴磁通偏差运算部113b,求出β轴指令磁通ψ
β*
与估计磁通ψ
β
的偏差(磁通偏差)δψ
β
。由电压指令确定部107,根据磁通偏差δψ
α
、δψ
β
以及轴电流i
α
、i
β
,求出指令轴电压v
α*
、v
β*
(第2轴电压)。指令轴电压v
α*
、v
β*
是,将同步旋转机械102的α-β坐标上的α轴指令轴电压v
α*
以及β轴指令轴电压v
β*
汇总并记载的。由α、β/u、v、w变换部114,将指令轴电压v
α*
、v
β*
变换为指令电压向量v
2u*
、v
2v*
、v
2w*
。
117.在无位置传感器磁通控制运转中,通过这样的控制,电机转矩追随指令转矩t
e*
,旋转机械磁通追随指令磁通向量ψ
s*
。其结果为,速度追随指令速度ω
ref*
。在如上所述,表现为“无位置传感器控制部134,执行无位置传感器磁通控制运转,即,以旋转机械磁通的振幅收敛于目标振幅的方式设定指令振幅”的情况下,“目标振幅”与指令振幅|ψ
s*
|对应。考虑到这种情况,以下,有时会将指令振幅|ψ
s*
|称为目标振幅|ψ
s*
|。
118.在执行无位置传感器磁通控制运转时,如图4所示,利用磁通估计部108,根据轴电流i
α
、i
β
以及指令轴电压v
α*
、v
β*
,求出估计磁通ψs。并且,在执行电流同步运转时,根据轴电流i
α
、i
β
以及指令电压向量v
1u*
、v
1v*
、v
1w*
,利用磁通估计部108,求出估计磁通ψs。具体而言,如图5所示,利用u、v、w/α、β变换部(第3两相三相坐标变换部)150,将指令电压向量v
1u
*、v
1v
*、v
1w
*变换为参照用轴电压v
α’、v
β’。然后,由磁通估计部108,根据轴电流i
α
、i
β
以及参照用轴电压v
α’、v
β’,求出估计磁通ψs。
[0119]“将同步电流提供给同步旋转机械102的电流同步运转”这表现并不意味着,在电流同步运转中必须利用指令轴电流。即使不利用指令轴电流也能够执行同步运转。例如,进行利用了指令轴电压的电压同步运转即可。关于此时的同步运转的细节,由于对本领域技术人员来说是容易想到的处理,因此,省略说明。并且,在本实施方式1的电流同步运转中,利用不是指令转矩t
e*
的指令。而且,若切换到无位置传感器磁通控制运转,则开始利用了指令转矩t
e*
的控制。
[0120]
在本说明书中,轴电流id、iq,不意味着在同步旋转机械102中实际流动的电流,而意味着作为信息传递的电流值。指令轴电流id*、iq*、指令轴电压v
d*
、v
q*
、指令速度ω
ref*
、转子位置θ以及指令电压向量v
1u*
、v
1v
*、v
1w
*也意味着作为信息传递的值。轴电流i
α
、i
β
、指令轴
电压v
α
*、v
β*
、估计磁通ψs、估计相位θs、估计转矩te、指令转矩t
e*
、指令振幅|ψ
s*
|(目标振幅|ψ
s*
|)、指令磁通向量ψ
s*
、指令电压向量v
2u*
、v
2v*
、v
2w*
、指令电压向量v
u*
、v
v*
、v
w*
等也是同样的。
[0121]
以下说明图3示出的电流同步控制部131的构成要素。
[0122]
(积分器128)
[0123]
积分器128,获得指令速度ω
ref*
,对指令速度ω
ref*
进行累计(积分)。如此,积分器128,求出转子位置θ。具体而言,积分器128,根据式(1)计算转子位置θ。s是,拉普拉斯算子。积分器128是,公知的积分器。
[0124]
(数学式1)
[0125][0126]
(u、w/d、q变换部127)
[0127]
u、w/d、q变换部127,获得转子位置θ,利用转子位置θ将相电流iu、iw变换为轴电流id、iq。具体而言,u、w/d、q变换部127,根据式(2)以及(3)将相电流iu、iw变换为轴电流id、iq,并输出轴电流id、iq。
[0128]
(数学式2)
[0129]iv
=-(iu+iw)
ꢀꢀꢀ
(2)
[0130]
(数学式3)
[0131][0132]
(同步电流指令部124)
[0133]
同步电流指令部124,生成指令轴电流i
d*
、i
q*
,并输出指令轴电流i
d*
、i
q*
。指令轴电流i
d*
、i
q*
,与应该向同步旋转机械102提供的同步电流对应。在本实施方式1中,指令轴电流i
d*
、i
q*
是,预先决定的电流。并且,指令轴电流i
d*
、i
q*
是,大小固定的电流。另外,关于指令轴电流i
d*
、i
q*
,通常是固定的,但也可以是可变的。在本实施方式1中,d轴指令轴电流i
d*
为零。具体而言,同步电流指令部124,根据式(4)生成指令轴电流i
d*
、i
q*
,并输出指令轴电流i
d*
、i
q*
。
[0134]
(数学式4)
[0135][0136]
(电压指令确定部125)
[0137]
电压指令确定部125,根据轴电流id、iq以及指令轴电流i
d*
、i
q*
,生成指令轴电压v
d*
、v
q*
。指令轴电压v
d*
、v
q*
被确定为,轴电流id、iq追随指令轴电流i
d*
、i
q*
。具体而言,电压指令确定部125,根据式(5)以及(6)生成指令轴电压v
d*
、v
q*
,并输出。式(5)以及(6)中的k
cdp
以及k
cqp
是比例增益。k
cdi
以及k
cqi
是积分增益。电压指令确定部125是,公知的pi补偿器。
[0138]
(数学式5)
[0139]vd*
=(k
cdp
+k
cdi
/s)(i
d*-id)
ꢀꢀꢀ
(5)
[0140]
(数学式6)
[0141][0142]
(d、q/u、v、w变换部126)
[0143]
d、q/u、v、w变换部126,利用转子位置θ,将指令轴电压v
d*
、v
q*
变换为指令电压向量v
1u*
、v
1v*
、v
1w*
。具体而言,d、q/u、v、w变换部126,根据式(7),将指令轴电压v
d*
、v
q*
变换为指令电压向量v
1u*
、v
1v*
、v
1w*
,并输出指令电压向量v
1u*
、v
1v*
、v
1w*
。
[0144]
(数学式7)
[0145][0146]
另外,也可以以通过由积分器128对指令速度ω
ref*
进行累计的方法以外的方法来获得转子位置θ的方式,构成电流同步控制部131。转子位置θ也可以是,从外部提供的值。例如,能够从上位控制装置,将转子位置θ提供给电流同步控制部131。
[0147]
以下说明图4示出的无位置传感器控制部134的构成要素。
[0148]
(u、w/α、β变换部106)
[0149]
u、w/α、β变换部106,将相电流iu、iw变换为轴电流i
α
、i
β
。具体而言,u、w/α、β变换部106,根据式(8)、(9),将相电流iu、iw变换为轴电流i
α
、i
β
,并输出轴电流i
α
、i
β
。
[0150]
(数学式8)
[0151][0152]
(数学式9)
[0153][0154]
(磁通估计部108)
[0155]
磁通估计部108,在执行无位置传感器磁通控制运转时,根据轴电流i
α
、i
β
以及指令轴电压v
α*
、v
β*
,求出估计磁通ψs(估计磁通ψ
α
、ψ
β
)。具体而言,磁通估计部108,利用式(10)、(11)以及(12),求出估计磁通ψ
α
、ψ
β
、以及估计磁通ψs的绝对值|ψs|。式(10)以及(11)中的ψ
α
|
t=0
、ψ
β
|
t=0
,分别是估计磁通ψ
α
、ψ
β
的初始值。式(10)以及(11)中的r是,同步旋转机械102的绕组电阻。在磁通估计部108被嵌入在dsp、微型计算机等的数字控制装置的情况下,为了式(10)以及(11)中的运算而需要的积分器被构成为离散系统。在此情况下,对一个控制周期前的估计磁通ψ
α
、ψ
β
与由来于当前的控制周期的值进行加法运算或减法运算即可。
[0156]
(数学式10)
[0157]
ψ
α
=∫(v
α*-ri
α
)dt+ψ
α|t
=0
ꢀꢀꢀ
(10)
[0158]
(数学式11)
[0159]
ψ
β
=∫(v
β*-ri
β
)dt+ψ
β|t=0
ꢀꢀꢀ
(11)
[0160]
(数学式12)
[0161]
[0162]
在执行电流同步运转时也利用磁通估计部108。在此情况下,磁通估计部108,与u、v、w/α、β变换部150(图5)协作,根据轴电流i
α
、i
β
以及指令电压向量v
1u*
、v
1v*
、v
1w*
,求出估计磁通ψ
α
、ψ
β
。具体而言,u、v、w/α、β变换部150,利用式(13)以及(14),将指令电压向量v
1u*
、v
1v*
、v
1w*
变换为参照用轴电压v
α’、v
β’。磁通估计部108,根据轴电流i
α
、i
β
以及参照用轴电压v
α’、v
β’,求出估计磁通ψ
α
、ψ
β
。在求出估计磁通ψ
α
、ψ
β
时,利用式(10)以及(11)的指令轴电压v
α*
、v
β*
被替换为参照用轴电压v
α’、v
β’的数学式。轴电流i
α
、i
β
,与执行无位置传感器磁通控制运转时同样,由电流传感器105a、105b(第1电流传感器105a、第2电流传感器105b)以及u、w/α、β变换部106确定。
[0163]
(数学式13)
[0164][0165]
(数学式14)
[0166][0167]
(转矩估计部109)
[0168]
转矩估计部109,根据轴电流i
α
、i
β
以及估计磁通ψs(估计磁通ψ
α
、ψ
β
)求出估计转矩te。具体而言,转矩估计部109,利用式(15),求出估计转矩te。式(15)中的pn是,同步旋转机械102的极对数。
[0169]
(数学式15)
[0170]
te=pn(ψ
αiβ-ψ
βiα
)
ꢀꢀꢀ
(15)
[0171]
(相位/速度估计部117)
[0172]
相位/速度估计部117,根据估计磁通ψs(估计磁通ψ
α
、ψ
β
)求出估计磁通ψs的估计相位θs。具体而言,相位/速度估计部117,根据式(16),求出估计磁通ψs的估计相位θs。并且,相位/速度估计部117,利用当前的控制周期中求出的估计相位θs(n)、以及上次的控制周期中求出的估计相位θs(n-1),根据式(17),求出估计速度ωr。相位/速度估计部117是,公知的相位估计器。在此,ts意味着本控制中的控制周期(采样周期)。n是时步。
[0173]
(数学式16)
[0174][0175]
(数学式17)
[0176][0177]
(转矩指令确定部116)
[0178]
转矩指令确定部116,根据指令速度ω
ref*
以及估计速度ωr,求出指令转矩t
e*
。具体而言,转矩指令确定部116,根据式(18),求出指令转矩t
e*
。式(18)中的k
sp
是比例增益。k
si
是积分增益。转矩指令确定部116是,公知的pi补偿器。
[0179]
(数学式18)
[0180]
t
e*
=(k
sp
+k
sl
/s)(ω
ref*-ωr)
ꢀꢀꢀ
(18)
[0181]
(误差变量确定部111)
[0182]
误差变量确定部111,根据虚拟电感(同步旋转机械102的电感)lm、轴电流i
α
、i
β
以及估计磁通ψs(估计磁通ψ
α
、ψ
β
),计算示出无效功率成分的误差变量ε。具体而言,首先,估计电枢反应磁通(求出估计电枢反应磁通l
mia
)。将估计电枢反应磁通l
mia
的α轴成分以及β轴成分,分别记载为估计电枢反应磁通l
miα
、估计电枢反应磁通l
miβ
。估计电枢反应磁通l
miα
、估计电枢反应磁通l
miβ
是,虚拟电感lm、与轴电流i
α
、i
β
的乘积。接着,根据估计磁通ψs(估计磁通ψ
α
、ψ
β
)以及估计电枢反应磁通l
mia
(估计电枢反应磁通l
miα
、l
miβ
),估计同步旋转机械102的永久磁铁的被估计的磁铁磁通(求出估计磁铁磁通ψ'
ae
)。将估计磁铁磁通ψ'
ae
的α轴成分以及β轴成分,分别记载为估计磁铁磁通ψ'
aeα
、ψ'
aeβ
。具体而言,如式(19)以及(20)所示,从估计磁通ψ
α
、ψ
β
中减去估计电枢反应磁通l
miα
、l
miβ
,从而求出估计磁铁磁通ψ'
aeα
、ψ'
aeβ
。接着,根据估计磁铁磁通ψ'
aeα
、ψ'
aeβ
以及轴电流i
α
、i
β
,如式(21)计算误差变量ε。
[0183]
(数学式19)
[0184]
ψ
′
aeα
=ψ
α-l
miα
ꢀꢀꢀ
(19)
[0185]
(数学式20)
[0186]
ψ
′
aeβ
=ψ
β-l
miβ
ꢀꢀꢀ
(20)
[0187]
(数学式21)
[0188]
ε=ψ
′
aeαiα
+ψ
′
aeβiβ
ꢀꢀꢀ
(21)
[0189]
如式(21)、图6a所示,误差变量确定部111,作为误差变量ε,计算同步旋转机械102的永久磁铁的被估计的磁铁磁通ψ'与同步旋转机械102的检测电流i的内积(第2内积)。
[0190]
另外,误差变量ε也可以,计算同步旋转机械102的估计磁通ψ与同步旋转机械102的检测电流i的内积(第1内积)来求出。
[0191]
因此,误差变量确定部111的结构也可以是,如式(22)、图6b所示,作为误差变量ε,不计算上述第2内积,而计算同步旋转机械102的估计磁通ψ与同步旋转机械102的检测电流i的内积(第1内积)。
[0192]
(数学式22)
[0193][0194]
(目标值设定部119)
[0195]
目标值设定部119,设定误差变量ε的目标值、即第1内积或第2内积的计算结果的目标值ε
*
。在此,目标值设定部119,将第1内积或第2内积的计算结果的目标值设定为零以下。但是,在最高转速的10%以下那样的低速区域中,也可以设定为正的值。若设定为正的值,则能够使产生同步旋转机械102的永久磁铁的磁铁磁通的方向的励磁磁通的电流流动。因此,得到与使永久磁铁磁化的效果等价的效果。
[0196]
另外,ε
*
的最大值,最好是在永久磁铁的磁铁磁通的方向上产生的励磁磁通小于永久磁铁的磁铁磁通的30%的值。
[0197]
(指令振幅确定部115)
[0198]
指令振幅确定部115,通过执行利用了误差变量ε的反馈控制,从而生成指令振幅|ψ
s*
|。
[0199]
如图7所示,指令振幅确定部115具有,减法器142、p增益143、i增益145、积分器146、以及加法器144。
[0200]
从磁通估计部108向积分器146提供估计磁通ψs的绝对值|ψs|,以作为积分的初
始值。根据该结构,在由后述的切换部133控制从电流同步运转向磁通控制运转(在此,无位置传感器磁通控制运转)的切换时,由磁通估计部108,将切换到磁通控制运转之前的估计磁通的振幅|ψs|,作为刚切换到磁通控制运转时的指令振幅|ψ
s*
|的初始值,提供给上述反馈控制。
[0201]
(指令相位确定部118)
[0202]
指令相位确定部118,根据估计磁通ψs的估计相位θs、指令转矩t
e*
以及估计转矩te,确定指令磁通向量ψ
s*
的指令相位θ
s*
。
[0203]
(指令磁通确定部112)
[0204]
指令磁通确定部112,根据指令振幅|ψ
s*
|以及指令相位θ
s*
,求出指令磁通向量ψ
s*
(指令磁通ψ
α*
、ψ
β*
)。具体而言,利用式(23)以及(24),求出指令磁通ψ
α*
、ψ
β*
。
[0205]
(数学式23)
[0206]
ψ
α*
=|ψ
s*
|cosθ
s*
ꢀꢀꢀ
(23)
[0207]
(数学式24)
[0208]
ψ
β*
=|ψ
s*
|sinθ
s*
ꢀꢀꢀ
(24)
[0209]
(α轴磁通偏差运算部113a,β轴磁通偏差运算部113b)
[0210]
α轴磁通偏差运算部113a,获得指令振幅ψ
α*
以及估计磁通ψ
α
,求出这些偏差(磁通偏差δψ
α
:ψ
α*-ψ
α
)。β轴磁通偏差运算部113b,获得指令振幅ψ
β*
以及估计磁通ψ
β
,求出这些偏差(磁通偏差δψ
β
:ψ
β*-ψ
β
)。作为α轴磁通偏差运算部113a、β轴磁通偏差运算部113b,利用公知的运算符即可。
[0211]
(电压指令确定部107)
[0212]
电压指令确定部107,根据磁通偏差δψ
α
、δψ
β
以及轴电流i
α
、i
β
,求出指令轴电压v
α*
、v
β*
。具体而言,电压指令确定部107,利用式(25),求出α轴指令轴电压v
α*
。并且,电压指令确定部107,利用式(26),求出β轴指令轴电压v
β*
。
[0213]
(数学式25)
[0214][0215]
(数学式26)
[0216][0217]
(α、β/u、v、w变换部114)
[0218]
α、β/u、v、w变换部114,将指令轴电压v
α*
、v
β*
变换为指令电压向量v
2u*
、v
2v*
、v
2w*
。具体而言,α、β/u、v、w变换部114,根据式(27),将指令轴电压v
α*
、v
β*
变换为指令电压向量v
2u*
、v
2v*
、v
2w*
,并输出指令电压向量v
2u*
、v
2v*
、v
2w*
。
[0219]
(数学式27)
[0220][0221]
返回到图1,对于旋转机械控制装置100的剩余的构成要素以及与旋转机械控制装
置100连接的构成要素,以下进行说明。
[0222]
(第1电流传感器105a,第2电流传感器105b)
[0223]
对于第1电流传感器105a以及第2电流传感器105b,能够利用公知的电流传感器。在本实施方式1中,第1电流传感器105a被设置为,测量在u相上流动的相电流iu。第2电流传感器105b被设置为,测量在w相上流动的相电流iw。但是,第1电流传感器105a以及第2电流传感器105b也可以被设置为,测量u相以及w相的两相以外的组合的两相的电流。
[0224]
(切换部133)
[0225]
切换部133,选择指令电压向量v
1u*
、v
1v*
、v
1w*
以及指令电压向量v
2u*
、v
2v*
、v
2w*
的一方,将选择出的一方作为指令电压向量v
u*
、v
v*
、v
w*
来输出。也就是说,切换部133控制从电流同步运转向磁通控制运转(在此,无位置传感器磁通控制运转)的切换。切换部133是,例如模拟开关、多路复用器等。另外,切换部133也可以,由微型计算机内部的软件构成。图8示出切换部133的结构图。
[0226]
(占空比生成部103)
[0227]
占空比生成部103,根据指令电压向量v
u*
、v
v*
、v
w*
,生成占空比du、dv、dw。在本实施方式1中,占空比生成部103,将指令电压向量v
u*
、v
v*
、v
w*
的各成分变换为各相的占空比du、dv、dw。对于占空比du、dv、dw的生成方法,利用一般的电压型pwm逆变器所使用的方法即可。例如,占空比du、dv、dw也可以是,指令电压向量v
u*
、v
v*
、v
w*
除以后述的pwm逆变器104的直流电源的电压值v
dc
的一半的值来求出的。在此情况下,占空比du是,2
×vu*
/v
dc
。占空比dv是,2
×vv*
/v
dc
。占空比dw是,2
×vw*
/v
dc
。占空比生成部103,输出占空比du、dv、dw。
[0228]
(pwm逆变器104)
[0229]
pwm逆变器104,具有直流电源以及变换电路,由变换电路,通过pwm控制将直流电压变换为电压向量vu、vv、vw。pwm逆变器104,将变换后的电压向量vu、vv、vw施加到同步旋转机械102。
[0230]
(同步旋转机械102)
[0231]
同步旋转机械102是,旋转机械控制装置100的控制对象。由pwm逆变器104,将电压向量施加到同步旋转机械102。“将电压向量施加到同步旋转机械102”是指,向同步旋转机械102中的三相交流坐标上的三相(u相,v相,w相)分别施加电压。在本实施方式1中,以三相(u相,v相,w相)的每一个成为,从具有相对高的电压的高电压相、以及具有相对低的电压的低电压相这两种中选择的任意一方的方式,控制同步旋转机械102。
[0232]
同步旋转机械102是,例如永磁同步电机。对于永磁同步电机,可以举出ipmsm(interior permanent magnet synchronous motor)以及spmsm(surface permanent magnet synchronous motor)。ipmsm,具有d轴电感ld与q轴电感lq不同的凸极性(一般而言,lq>ld的反向凸极性),除了磁铁转矩以外还可以利用磁阻转矩。因此,ipmsm的驱动效率非常高。对于同步旋转机械102,也可以利用同步磁阻电机。
[0233]
(考察)
[0234]
如上所述,在旋转机械控制装置100中,无位置传感器控制部134的指令振幅确定部115,通过执行利用了误差变量ε的反馈控制,从而生成指令振幅|ψ
s*
|。此时,从磁通估计部108向指令振幅确定部115的积分器146提供估计磁通ψs的绝对值|ψs|,以作为积分的初始值。根据该结构,在由切换部133控制从电流同步运转向磁通控制运转(在此,无位置传感
器磁通控制运转)的切换时,由磁通估计部108,将切换到磁通控制运转之前的估计磁通的振幅|ψs|,作为刚切换到磁通控制运转时的指令振幅|ψ
s*
|的初始值,提供给上述反馈控制。
[0235]
因此,根据上述结构的旋转机械控制装置100,能够抑制从电流同步运转向磁通控制运转的切换时产生的电压浪涌。
[0236]
因此,根据上述结构的旋转机械控制装置100,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
[0237]
(实施方式2)
[0238]
以下,说明改变实施方式1所涉及的旋转机械控制装置100的一部分而构成的实施方式2所涉及的旋转机械控制装置。在此,关于实施方式2所涉及的旋转机械控制装置,对于与旋转机械控制装置100同样的构成要素,因为已经说明而赋予相同的符号并省略其详细说明,以与旋转机械控制装置100不同之处为中心进行说明。
[0239]
图9是实施方式2所涉及的旋转机械控制装置100a的方框图。
[0240]
如图9所示,旋转机械控制装置100a是,将实施方式1所涉及的旋转机械控制装置100中的无位置传感器控制部134改变为磁通同步控制部132而构成的。
[0241]
磁通同步控制部132被构成为,执行同步旋转机械102的磁通同步运转。磁通同步运转是,一种磁通控制运转,并且是按每个控制周期确定估计磁通的相位应该移动的移动量,利用确定的移动量来确定指令磁通向量的相位的运转。
[0242]
因此,旋转机械控制装置100a,由切换部133控制从电流同步运转向作为磁通控制运转的磁通同步运转的切换。
[0243]
图10是磁通同步控制部132的方框图。
[0244]
如图10所示,磁通同步控制部132是,将实施方式1所涉及的无位置传感器控制部134中的指令相位确定部118改变为指令相位确定部218,并删除转矩指令确定部116而构成的。
[0245]
(指令相位确定部218)
[0246]
指令相位确定部218,根据指令速度ω
ref*
以及估计磁通ψs的估计相位θs、或指令速度ω
ref*
、估计转矩te以及估计磁通ψs的估计相位θs确定指令磁通向量ψ
s*
的指令相位θ
s*
。
[0247]
根据指令速度ω
ref*
以及估计磁通ψs的估计相位θs确定指令磁通向量ψ
s*
的指令相位θ
s*
的指令相位确定部218也可以是,例如图11所示的指令相位确定部218a。
[0248]
根据指令速度ω
ref*
、估计转矩te以及估计磁通ψs的估计相位θs确定指令磁通向量ψ
s*
的指令相位θ
s*
的指令相位确定部218也可以是,例如图12所示的指令相位确定部218b、图13所示的指令相位确定部218c、或图14所示的指令相位确定部218d。
[0249]
如图11所示,指令相位确定部218a具有乘法部164、以及相位加法器165。指令相位确定部218a,利用指令速度ω
ref*
,按每个控制周期确定估计磁通ψs的估计相位θs应该移动的移动量δθs,利用确定的移动量δθs以及估计磁通ψs的估计相位θs,确定指令磁通向量ψ
s*
的指令相位θ
s*
。
[0250]
如图12所示,指令相位确定部218b具有,高通滤波器163、增益乘法部162、速度误差运算部161、乘法部164、以及相位加法器165。指令相位确定部218b,利用指令速度ω
ref*
以及估计转矩te,按每个控制周期确定估计磁通ψs的估计相位θs应该移动的移动量δθs,利用确定的移动量δθs以及估计磁通ψs的估计相位θs,确定指令磁通向量ψ
s*
的指令相位θ
s*
。
[0251]
如图13所示,指令相位确定部218c具有,乘法部164、高通滤波器166、符号反转部167、pi补偿部168、加法器169、以及相位加法器165。指令相位确定部218c,利用指令速度ω
ref*
以及估计转矩te,按每个控制周期确定估计磁通ψs的估计相位θs应该移动的移动量δθs,利用确定的移动量δθs以及估计磁通ψs的估计相位θs,确定指令磁通向量ψ
s*
的指令相位θ
s*
。
[0252]
如图14所示,指令相位确定部218d具有,乘法部164、低通滤波器170、减法部173、pi补偿部168、加法器169、以及相位加法器165。指令相位确定部218d,利用指令速度ω
ref*
以及估计转矩te,按每个控制周期确定估计磁通ψs的估计相位θs应该移动的动量δθs,利用确定的移动量δθs以及估计磁通ψs的估计相位θs,确定指令磁通向量ψ
s*
的指令相位θ
s*
。
[0253]
根据上述结构,指令相位确定部218能够使指令磁通向量ψ
s*
的指令相位θ
s*
追随估计磁通ψs的估计相位θs。
[0254]
因此,旋转机械控制装置100a,在由切换部133控制从电流同步运转向作为磁通控制运转的磁通同步运转的切换时,能够使磁通控制运转的切换前的估计磁通的估计相位与切换后的指令磁通的指令相位一致。
[0255]
(考察)
[0256]
如上所述,根据上述结构的旋转机械控制装置100a,在从电流同步运转向磁通控制运转的切换时,能够使磁通控制运转的切换前的估计磁通的估计相位与切换后的指令磁通的指令相位一致。
[0257]
因此,根据上述结构的旋转机械控制装置100a,能够进一步抑制从电流同步运转向磁通控制运转的切换时产生的电压浪涌。
[0258]
(实施方式3)
[0259]
以下,说明改变实施方式1所涉及的旋转机械控制装置100的一部分而构成的实施方式3所涉及的旋转机械控制装置。在此,关于实施方式3所涉及的旋转机械控制装置,对于与旋转机械控制装置100同样的构成要素,因为已经说明而赋予相同的符号并省略其详细说明,以与旋转机械控制装置100不同之处为中心进行说明。
[0260]
图15是实施方式3所涉及的旋转机械控制装置100b的方框图。
[0261]
如图15所示,旋转机械控制装置100b是,将实施方式1所涉及的旋转机械控制装置100中的无位置传感器控制部134改变为磁通同步/无位置传感器控制部135而构成的。
[0262]
磁通同步/无位置传感器控制部135被构成为,切换同步旋转机械102的磁通同步运转以及无位置传感器磁通控制运转的任意一方而执行。
[0263]
因此,旋转机械控制装置100b,由切换部133控制从电流同步运转向磁通控制运转的切换,由磁通同步/无位置传感器控制部135控制从作为磁通控制运转的磁通同步运转向作为磁通控制运转的无位置传感器磁通控制运转的切换。
[0264]
图16是磁通同步/无位置传感器控制部135的方框图。
[0265]
如图16所示,磁通同步/无位置传感器控制部135是,将实施方式1所涉及的无位置
传感器控制部134中的指令相位确定部118改变为指令相位确定部318而构成的。
[0266]
(指令相位确定部318)
[0267]
指令相位确定部318,具有根据指令速度ω
ref*
、估计转矩te以及估计磁通ψs的估计相位θs确定指令磁通向量ψ
s*
的指令相位θ
s*
的功能(以下,也称为“第1功能”)以及根据指令速度ω
ref*
、指令转矩t
e*
、估计转矩te以及估计磁通ψs的估计相位θs确定指令磁通向量ψ
s*
的指令相位θ
s*
的功能(以下,也称为“第2功能”),切换这些功能的一方而执行。
[0268]
磁通同步/无位置传感器控制部135,在指令相位确定部318执行第1功能的情况下执行磁通同步运转,在执行第2功能的情况下执行无位置传感器磁通控制运转。
[0269]
关于指令相位确定部318,例如,也可以是图17所示的指令相位确定部318a,也可以是图18所示的指令相位确定部318b。
[0270]
如图17所示,指令相位确定部318a是,对实施方式2所涉及的指令相位确定部218c追加减法部171以及切换部172a而构成的。
[0271]
切换部172a,选择减法部171的输出以及符号反转部167的输出的任意一方,并输出给pi补偿部168。
[0272]
指令相位确定部318a,在切换部172a选择符号反转部167的输出的情况下执行第1功能,在切换部172a选择减法部171的输出的情况下执行第2功能。
[0273]
切换部172a,在初始状态下,选择符号反转部167的输出。另外,切换部172a,在由切换部133控制从电流同步运转向磁通同步运转的切换的情况下,将符号反转部167的输出的选择切换到减法部171的输出的选择。
[0274]
典型而言,从由切换部133控制从电流同步运转向磁通同步运转的切换后,到由切换部172a控制从符号反转部167的输出的选择到减法部171的输出的选择的切换为止的期间为0.5秒。
[0275]
如图18所示,指令相位确定部318b是,对实施方式2所涉及的指令相位确定部218d追加切换部172b而构成的。
[0276]
切换部172b,选择低通滤波器170的输出以及指令转矩t
e*
的任意一方,并输出给减法部173。
[0277]
指令相位确定部318b,在切换部172b选择低通滤波器170的输出的情况下执行第1功能,在切换部172b选择指令转矩t
e*
的情况下执行第2功能。
[0278]
切换部172b,在初始状态下,选择低通滤波器170的输出。而且,切换部172b,在由切换部133控制从电流同步运转向磁通同步运转的切换的情况下,将低通滤波器170的输出的选择切换到指令转矩t
e*
的选择。
[0279]
典型而言,从由切换部133控制从电流同步运转向磁通同步运转的切换后,到由切换部172a控制从低通滤波器170的输出的选择到指令转矩t
e*
的选择的切换为止的期间为0.5秒。
[0280]
根据指令相位确定部318的上述结构,磁通同步/无位置传感器控制部135,在由切换部133控制从电流同步运转向磁通同步运转的切换的情况下,控制从作为磁通控制运转的磁通同步运转向作为磁通控制运转的无位置传感器磁通控制运转的切换。
[0281]
因此,旋转机械控制装置100b,在从电流同步运转向无位置传感器磁通控制运转转移时,插入磁通同步运转。
[0282]
(考察)
[0283]
如上所述,根据上述结构的旋转机械控制装置100b,在从电流同步运转向无位置传感器磁通控制运转转移时,插入磁通同步运转。
[0284]
据此,在从电流同步运转切换到无位置传感器磁通控制运转时,能够抑制同时产生指令磁通的振幅的变动和相位的变动。
[0285]
因此,根据上述结构的旋转机械控制装置100b,能够进一步抑制从电流同步运转向无位置传感器磁通控制运转的切换时产生的电压浪涌。
[0286]
(实施方式4)
[0287]
以下,说明改变实施方式1所涉及的旋转机械控制装置100的一部分而构成的实施方式所涉及的旋转机械控制装置。在此,关于实施方式4所涉及的旋转机械控制装置,对于与旋转机械控制装置100同样的构成要素,因为已经说明而赋予相同的符号并省略其详细说明,以与旋转机械控制装置100不同之处为中心进行说明。
[0288]
图19是实施方式4所涉及的旋转机械控制装置100c的方框图。
[0289]
如图19所示,旋转机械控制装置100c是,将实施方式1所涉及的旋转机械控制装置100中的切换部133改变为切换部133c,将无位置传感器控制部134改变为无位置传感器控制部134c而构成的。
[0290]
切换部133c,与实施方式1所涉及的切换部133同样,选择指令电压向量v
1u*
、v
1v*
、v
1w*
以及指令电压向量v
2u*
、v
2v*
、v
2w*
的一方,将选择出的一方作为指令电压向量v
u*
、v
v*
、v
w*
输出。也就是说,切换部133c,与切换部133同样,控制从电流同步运转向磁通控制运转(在此,无位置传感器磁通控制运转)的切换。
[0291]
但是,在切换部133c中,对切换部133追加了如下功能,即,在从无位置传感器控制部134c输出的切换控制信号s(后述)输入的定时,进行从电流同步运转向磁通控制运转的切换。也就是说,切换部133c,若从无位置传感器控制部134c输出切换控制信号s,则进行从电流同步运转向磁通控制运转的切换。
[0292]
无位置传感器控制部134c,具有与无位置传感器控制部134具有的功能同样的功能,进一步,向切换部133c,输出用于从电流同步运转切换到磁通控制运转的信号即切换控制信号s。
[0293]
图20是无位置传感器控制部134c的方框图。
[0294]
如图20所示,无位置传感器控制部134c是,对实施方式1所涉及的无位置传感器控制部134追加运转模式切换判断部120而构成的。
[0295]
运转模式切换判断部120输出切换控制信号s。
[0296]
运转模式切换判断部120也可以,例如,在由误差变量确定部111,计算同步旋转机械102的永久磁铁的被估计的磁铁磁通ψ'与同步旋转机械102的检测电流i的内积(第2内积)而求出的、或计算同步旋转机械102的估计磁通ψ与同步旋转机械102的检测电流i的内积(第1内积)而求出的示出无效功率成分的误差变量ε的绝对值成为规定值以下的情况下,输出切换控制信号s。
[0297]
图21是用于说明dq坐标系、αβ坐标系、以及γδ坐标系的图。在图21中示出,对图2中说明的坐标系追加了γ-δ坐标(第3两相坐标)的三个两相坐标的关系。
[0298]
图22是示出从γ-δ坐标(第3两相坐标)的γ轴看时的d-q坐标(第1两相坐标)的d
轴的超前角δθ与同步旋转机械102的实际转矩(估计转矩te)的关系的相关图。
[0299]
如图22所示,在超前角δθ过大的情况下(在图22中的90
°
方向上的偏离过大的情况下),以及在超前角δθ过小的情况下(在图22中的-90
°
方向上的偏离过大的情况下),有时会同步旋转机械102的实际转矩低于同步旋转机械102的负载转距。
[0300]
若在如此同步旋转机械102的实际转矩低于同步旋转机械102的负载转距的定时,进行从电流同步运转向磁通控制运转的切换,则在切换后的磁通控制运转中,同步旋转机械102的速度不能追随,有时会发生切换后的磁通控制运转中的失步。
[0301]
因此,运转模式切换判断部120,在同步旋转机械102的实际转矩成为最大值附近的定时,即,在示出无效功率成分的误差变量ε的绝对值成为规定值以下的情况下,输出切换控制信号s。在此,规定值是,同步旋转机械102的实际转矩不低于同步旋转机械102的负载转距的值。
[0302]
也可以根据预先利用实际装置测量的测量结果决定该规定值,也可以预先通过仿真计算该规定值。
[0303]
据此,能够抑制切换后的磁通控制运转中的失步。
[0304]
特别是,运转模式切换判断部120最好是,在同步旋转机械102的实际转矩成为最大值的定时,即,在示出无效功率成分的误差变量ε的绝对值成为零的情况下,输出切换控制信号s。
[0305]
图23是示出工作模式切换判断部120输出切换控制信号s的定时的时间图的一个例子。
[0306]
如图23所示,工作模式切换判断部120,在示出无效功率成分的误差变量ε的绝对值成为规定值以下(在此,零)的定时,输出切换控制信号s。据此,切换部133c,在示出无效功率成分的误差变量ε的绝对值成为规定值以下(在此,零)的定时,进行从电流同步运转向磁通控制运转(在此,无位置传感器磁通控制运转)的切换。
[0307]
并且,运转模式切换判断部120也可以,在同步旋转机械102的感应电压上升到能够高精度地进行切换后的磁通控制运转的足够高的电压的定时,输出切换控制信号s。更具体而言,运转模式切换判断部120也可以,在从电流同步运转的开始时经过了根据预先决定的同步旋转机械102的加速率和切换转速而决定的第1规定期间的情况下,输出切换控制信号s。在此,第1规定期间是,同步旋转机械102的感应电压上升到能够高精度地进行切换后的磁通控制运转的足够高的电压的期间。
[0308]
也可以根据预先利用实际装置测量的测量结果决定该第1规定期间,也可以预先通过仿真计算该第1规定期间。
[0309]
在此,作为一个例子,在加速率为12000rpm/s,切换转速为1200rpm的情况下,根据这些而决定的第1规定期间也可以是0.1秒,但并不限于此。
[0310]
据此,能够抑制切换后的磁通控制运转中的失步。
[0311]
并且,运转模式切换判断部120也可以,即使在示出无效功率成分的误差变量ε的绝对值成为规定值以下的情况下,若在同步旋转机械102的感应电压没有上升到能够高精度地进行切换后的磁通控制运转的足够高的电压的定时,则禁止切换控制信号s的输出。更具体而言,运转模式切换判断部120也可以,在从电流同步运转的开始时的比第1规定期间短的第2规定期间以内由误差变量确定部111求出的第1内积或第2内积的绝对值成为规定
值以下的情况下,禁止从电流同步运转向磁通控制运转的切换。在此,第2规定期间是,同步旋转机械102的感应电压没有上升到能够高精度地进行切换后的磁通控制运转的足够高的电压的期间。
[0312]
也可以根据预先利用实际装置测量的测量结果决定该第2规定期间,也可以预先通过仿真计算该第2规定期间。
[0313]
在此,作为一个例子,在加速率为12000rpm/s,切换转速为1200rpm,第1规定期间为0.1秒的情况下,第2规定期间也可以是0.08秒,但并不限于此。
[0314]
据此,能够进一步抑制切换后的磁通控制运转中的失步。
[0315]
图24是示出工作模式切换判断部120输出切换控制信号s的定时的时间图的一个例子。
[0316]
如图24所示,工作模式切换判断部120,即使在从电流同步运转的开始的第2规定期间(t2)以内,示出无效功率成分的误差变量ε的绝对值成为规定值以下(在此,零),也不输出切换控制信号s,在第2规定期间以后,示出无效功率成分的误差变量ε的绝对值成为规定值以下(在此,零)的情况下,输出切换控制信号s。据此,切换部133c,在从电流同步运转的开始的第2规定期间以内,示出无效功率成分的误差变量ε的绝对值成为规定值以下(在此,零)的情况下,禁止从电流同步运转向磁通控制运转(在此,无位置传感器磁通控制运转)的切换。而且,切换部133c,在第2规定期间以后,示出无效功率成分的误差变量ε的绝对值成为规定值以下(在此,零)的情况下,进行从电流同步运转向磁通控制运转(在此,无位置传感器磁通控制运转)的切换。
[0317]
并且,运转模式切换判断部120也可以,在电流同步运转的执行中示出无效功率成的误差变量ε的绝对值没有成为规定值以下、且经过了第1规定期间的情况下,输出切换控制信号s。
[0318]
图25是示出工作模式切换判断部120输出切换控制信号s的定时的时间图的一个例子。
[0319]
如图25所示,工作模式切换判断部120,在电流同步运转的执行中示出无效功率成分的误差变量ε的绝对值没有成为规定值以下(在此,零)的情况下,若经过同步旋转机械102的感应电压上升到能够高精度地进行切换后的磁通控制运转的足够高的电压的定时即第1规定期间(t1),则输出切换控制信号s。据此,切换部133c,在电流同步运转的执行中示出无效功率成分的误差变量ε的绝对值没有成为规定值以下、且经过了第1规定期间的情况下,进行从电流同步运转向磁通控制运转(在此,无位置传感器磁通控制运转)的切换。
[0320]
据此,能够抑制切换后的磁通控制运转中的失步。
[0321]
(考察)
[0322]
如上所述,根据上述结构的旋转机械控制装置100c,能够抑制从电流同步运转向磁通控制运转的切换后的失步。
[0323]
因此,根据上述结构的旋转机械控制装置100c,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
[0324]
另外,在实施方式4中说明了,将运转模式切换判断部120以及切换部133c适用于实施方式1所涉及的旋转机械控制装置100的结构例,运转模式切换判断部120,在估计磁通与检测电流的第1内积、或磁铁磁通与检测电流的第2内积的绝对值成为规定值以下的情况
下,或者,在从电流同步运转的开始时经过了根据预先决定的同步旋转机械102的加速率以及转换转速而决定的第1规定期间的情况下,输出切换控制信号s,切换部133c,若从运转模式切换判断部120输出切换控制信号s,则进行从电流同步运转向磁通控制运转的切换。
[0325]
然而,适用上述运转模式切换判断部120、以及上述切换部133c的对象,并不限于旋转机械控制装置100。例如,也可以适用于专利文献2所述的、不执行利用了估计磁通与检测电流的第1内积、或磁铁磁通与检测电流的第2内积的反馈控制而生成指令振幅的结构的旋转机械控制装置。
[0326]
在此情况下,在适用了上述运转模式切换判断部120、以及上述切换部133c的专利文献2所涉及的旋转机械控制装置中,能够抑制从电流同步运转(启动同步运转)向磁通控制运转(无位置传感器运转)的切换后的失步。
[0327]
因此,根据适用了上述运转模式切换判断部120、以及上述切换部133c的、专利文献2所涉及的旋转机械控制装置,能够进一步改善进行直接转矩控制等主要利用了磁通的磁通控制的旋转机械控制装置的启动期间中的稳定性。
[0328]
(补充)
[0329]
以上,对于本公开的一个形态所涉及的旋转机械控制装置,根据实施方式1至4进行了说明,但是,本公开,并不限于这些实施方式。只要不脱离本公开的宗旨,对该实施方式实施本领域技术人员想到的各种变形的形态,或组合不同的实施方式的构成要素来构成的形态,也可以包含在本公开的一个或多个形态的范围内。
[0330]
本公开能够广泛地用于控制旋转机械的旋转机械控制装置等。
[0331]
符号说明
[0332]
100,100a,100b,100c 旋转机械控制装置
[0333]
102 同步旋转机械
[0334]
103 占空比生成部
[0335]
104 pwm逆变器
[0336]
105a 第1电流传感器
[0337]
105b 第2电流传感器
[0338]
106u、w/α、β 变换部
[0339]
107 电压指令确定部
[0340]
108 磁通估计部
[0341]
109 转矩估计部
[0342]
111 误差变量确定部
[0343]
112 指令磁通确定部
[0344]
113a α轴磁通偏差运算部
[0345]
113b β轴磁通偏差运算部
[0346]
114α、β/u、v、w 变换部
[0347]
115 指令振幅确定部
[0348]
116 转矩指令确定部
[0349]
117 相位/速度估计部
[0350]
118,218,218a,218b,218c,218d,318,318a,318b 指令相位确定部
[0351]
119 目标值设定部
[0352]
120 运转模式切换判断部
[0353]
124 同步电流指令部
[0354]
125 电压指令确定部
[0355]
126d、q/u、v、w 变换部
[0356]
127u、w/d、q 变换部
[0357]
128 积分器
[0358]
131 电流同步控制部
[0359]
132 磁通同步控制部
[0360]
133,133c,172a,172b 切换部
[0361]
134,134c 无位置传感器控制部
[0362]
135 磁通同步/无位置传感器控制部
[0363]
142 减法器
[0364]
143 p增益
[0365]
144,169 加法器
[0366]
145 i增益
[0367]
146 积分器
[0368]
150u、v、w/α、β 变换部
[0369]
161 速度误差运算部
[0370]
162 增益乘法部
[0371]
163,166 高通滤波器
[0372]
164 乘法部
[0373]
165 相位加法器
[0374]
167 符号反转部
[0375]
168 pi补偿部
[0376]
170 低通滤波器
[0377]
171,173 减法部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1