一种海上风电场黑启动有功功率控制方法与流程
1.本发明属于新能源转换与控制技术领域,具体涉及海上风电场黑启动有功功率控制方法。
背景技术:
2.随着海上风力发电在电力系统中的广泛应用,在提高沿海局域电力系统的风电渗透率的同时也会增加电力系统的稳定风险,利用海上风电场作为黑启动电源可以加快沿海局部电力系统恢复速度,但传统的黑启动方案无法完全适应海上复杂多变的气候环境,传统的风电有功功率控制方法也存在较多局限性,一方面,海上风电场输出功率损失受到尾流效应以及大气稳定度影响,需要建立更有针对性的海上风电场短期功率预测模型,为海上风电场作为黑启动电源的设计方案提供有功核算依据;另一方面,传统的风电机组有功调频方案均存在一定的局限性,尤其是海上风电黑启动过程中需要的降功率启动以及应对不断投切的负荷带来的频率波动,均需要设计适合海上风电场黑启动阶段的有功功率控制方案;
3.对于传统的风电机组有功功率控制方案中,变桨距角控制方式简单易操作,但长时间调节会损害设备使用寿命;超速减载控制响应速度快控制灵活,但调节范围受到最大转速限制;利用储能调节频率波动虽然有良好的响应特性,但增加了额外成本,经济性不足;因此需研发一种海上风电场黑启动有功功率控制方法来解决现有的问题。
技术实现要素:
4.本发明的目的在于提供一种海上风电场黑启动有功功率控制方法,以解决海上风电场作为黑启动电源进行电力系统恢复过程中无法实现有功功率的自适应调节的问题。
5.为实现上述目的,本发明提供如下技术方案:一种海上风电场黑启动有功功率控制方法,包括以下步骤:
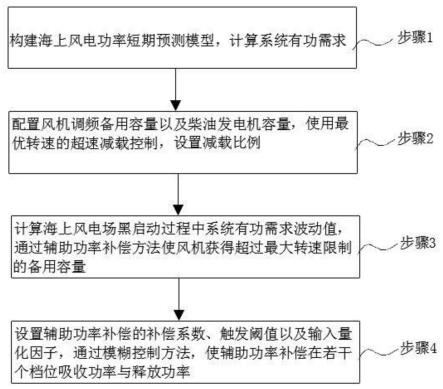
6.步骤1、构建海上风电功率短期预测模型,计算系统有功需求;
7.步骤2、配置风机调频备用容量以及柴油发电机容量,使用最优转速的超速减载控制,设置减载比例;
8.步骤3、计算海上风电场黑启动过程中系统有功需求波动值,通过辅助功率补偿方法使风机获得超过最大转速限制的备用容量;
9.步骤4、设置辅助功率补偿的补偿系数、触发阈值以及输入量化因子,通过模糊控制方法,使辅助功率补偿在若干个档位吸收功率与释放功率。
10.优选的,步骤1中,所述海上风电功率短期预测模型基于风向变化以及风电场尾流效应损失功率,并量化风向尾流效应损失功率值,同时采集大气稳定度数据,将衡量大气稳定度的特征输入预测模型;
11.其中,所述大气稳定度衡量的参数包括湍流长度和风切变:
[0012][0013][0014]
式中:t和s分别代表湍流强度和风切变,为气象桅杆90m高处风速测量值的标准差;v
90
、v
40
分别为气象桅杆90m和40m高处转杯风速表测量的风速值;
[0015]
优选的,所述风电场尾流效应损失的功率计算,通过风电场尾流模型来表征风电场尾流效应的功率损失:
[0016]
pi=w(vi,di;α)+δi[0017]
式中:w(
·
)表示风电场尾流效应损失;vi和di分别为风速和风向;α是回归参数;δi白噪声是均值为0,方差为σ2的高斯随机变量。
[0018]
优选的,所述风向的w(vi,di;α)可用关于vi的回归函数表示:
[0019][0020]
式中:w(vi,di;α)与vi非线性相关;[di]为风向值取整;表示vi的列向量;α
[di]
为对应的回归系数行向量;vc和vr分别为风电机的切入风速与额定风速,得到响应功率风向参数,输入海上风电功率短期预测模型。
[0021]
优选的,步骤1中,所述海上风电功率短期预测模型基于循环神经网络,使用具有注意力机制的encoder-decoder框架。
[0022]
优选的,步骤2中,所述超速减载控制步骤包括:通过控制转子转速进行有功调频,当风电机组转速增加时,使其从最大功率跟踪点下移至次优点运行,此时风机出力减少,使得一部分功率储存在转子中,并保留用于调频的备用容量;
[0023]
风机获取得机械功率pm表示为:
[0024][0025]
式中:ρ为空气密度;r为风轮半径;v为风速;c
p
(λ,β)为风机的风能利用系数,其中λ为叶尖速比,λ=ωrr/v;β为桨距角;系数
[0026]
通过改变风电机组的转子转速以保留功率备用,使得机组具备功率支撑能力,在减载模式下风机捕获的功率为:
[0027][0028]
式中:风电机组初始减载输出功率为p
del0
、初始减载转速为ω
del0
;其减载比例受到风机最大转子转速限制,风机最大减载量为:
[0029][0030]
式中:v
ij
为风机的输入风速;为风机允许的最大转子转速。
[0031]
优选的,步骤4中,所述辅助功率补偿p
ad
根据频率变化率和频率偏差自适应调节,
其表达式为:
[0032][0033]
式中:r为辅助功率补偿环节调节阈值,将dω/dt取绝对值使p
ad
调节不受频率变化率符号的,使用δω判断p
ad
调节方向,k为调节补偿系数。
[0034]
优选的,步骤4中,所述模糊控制方法步骤包括:将指令功率阶跃时的频率偏差和频率变化率划分为若干个区间,得到辅助功率补偿环节模糊控制规律表,利用所得规律构建模糊控制器。
[0035]
优选的,所述构建模糊控制器的步骤包括:
[0036]
模糊化步骤:使用量化因子将频率偏差和频率变化率的输入变量做归一化处理,k1和k2为输入量化因子,k1和k2分别为最大功率波动下的角频率偏差和角频率变化率幅值,则角频率偏差和角频率变化率的基本论域设置为[-1,1];将输出变量的变化范围设置为[-1,1],代表惯辅助功率补偿环节调节比例u,通过定义隶属度函数可将输入输出转化为模糊变量,所述隶属度函数使用三角形和s型隶属度函数,将量化后的输入输出划分为五个等级:nl表示负大、ns表示负小、zo表示零、ps表示正小、pl表示正大;
[0037]
模糊推理步骤:根据模糊控制规律以及输入输出隶属度函数,设计基于mamdani型的模糊规则;
[0038]
反模糊化步骤;使用重心法对输出进行反模糊化处理,得到辅助功率补偿环节调节p
ad
其中p
ad
的设计逻辑为吸收功率为负值,释放功率为正值。
[0039][0040]
本发明的技术效果和优点:该海上风电场黑启动有功功率控制方法,利用海上风电场运行特性设计风机的有功控制,解决系统运行状态以及孤岛系统自启动过程带来的频率波动影响,增加了有功调节范围,提升了方案的控制精度和响应速度,大大提高了海上风电场黑启动过程中的有功功率稳定,具有重要学术意义和工程实用价值;
[0041]
本发明考虑海上风电场黑启动过程中系统有功需求波动,在原有转速控制内增加辅助功率补偿环节,扩大频率调节范围,使得风机能够获得超过最大转速限制的备用容量,提高有功功率调节范围;合理设置辅助功率补偿的表达式和触发阈值,避免频率轻微波动造成的辅助功率补偿环节频繁动作,同时也使得引入的辅助功率补偿环节能够根据频率变化和频率偏差自适应调节,提高有功功率调节速度;对于辅助功率补偿环节的补偿系数和输入量化因子的设置,采用模糊控制的方法,根据场景设置模糊规则,使得辅助功率补偿环节能够在多个档位进行功率的吸收与释放,提高有功功率调节的精度。
附图说明
[0042]
图1为本发明的流程示意图;
[0043]
图2为本发明海上风电场黑启动有功控制方案流程图;
[0044]
图3为本发明海上风电功率预测encoder-decoder framework框架图;
[0045]
图4为本发明辅助功率补偿环节模糊控制器。
具体实施方式
[0046]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0047]
本发明提供了如图1、图2中所示的一种海上风电场黑启动有功功率控制方法,包括以下步骤:
[0048]
步骤1、构建海上风电功率短期预测模型,计算系统有功需求;确定待启动风机数量和系统内其他待启动设备有功需求值;
[0049]
基于海上风电场黑启动方案的设备启动顺序,核算各阶段启动设备的有功需求,针对海上风电场具有的复杂气象环境,为确定风机启动数量,在进行风电功率短期预测时,充分考虑大气稳定度和尾流效应的影响,将衡量大气稳定度的特征作为预测模型的输入,同时基于风向变化以及风电场尾流效应损失功率构建功率风向模型,进而量化各风向尾流效应损失功率值;其中大气稳定度衡量参数采用莫宁-奥布霍夫长度,其数值可由湍流长度和风切变来表征:
[0050][0051][0052]
式中:t和s分别代表湍流强度和风切变,为气象桅杆90m高处风速测量值的标准差;v
90
、v
40
分别为气象桅杆90m和40m高处转杯风速表测量的风速值。
[0053]
对于风电场尾流效应损失的功率计算,提出pd模型来表征风电场尾流效应的功率损失:
[0054]
pi=w(vi,di;α)+δi[0055]
式中:w(
·
)表示风电场尾流效应损失;vi和di分别为风速和风向;α是回归参数;δi白噪声是均值为0,方差为σ2的高斯随机变量;所以风电场损失的功率pi主要由尾流效应产生,同时受大气稳定度的影响;其中某风向的w(vi,di;α)可用关于vi的回归函数表示:
[0056][0057]
式中:w(vi,di;α)与vi非线性相关;[di]为风向值取整;表示vi的列向量;为对应的回归系数行向量;vc和vr分别为风电机的切入风速与额定风速;由此公式得出的响应功率风向参数也称为pd参数,作为海上风电功率短期预测的模型输入;
[0058]
其中模型采用循环神经网络,同时考虑大气稳定度因素,并使用具有注意力机制的encoder-decoder框架,如图3所示,从而提升预测精度;
[0059]
步骤2、配置风机调频备用容量以及柴油发电机容量,使用最优转速的超速减载控制,设置减载比例;综合考虑风机调频备用容量以及柴油发电机容量配置两个方面的调频因素,在负荷量较小的启动初期,利用转子动能存储备用容量,采用最优转速下的超速减载控制,在不超过风机允许的最大转速下合理设置减载比例;
[0060]
超速减载控制是利用控制转子转速进行有功调频,当风电机组转速增加时,使其从最大功率跟踪点下移至次优点运行,此时风机出力减少,可以使得一部分功率储存在转子中,留有用于调频的备用容量;
[0061]
本实施例中,风机为双馈风机,风机获取得机械功率pm可表示为:
[0062][0063]
式中:ρ为空气密度;r为风轮半径;v为风速;c
p
(λ,β)为风机的风能利用系数,其中λ为叶尖速比,λ=ωrr/v;β为桨距角;系数
[0064]
为使风电机组减载运行在非最大功率追踪点,需要通过改变风电机组的转子转速以保留功率备用,使得机组具备功率支撑能力,在减载模式下风机捕获的功率为:
[0065][0066]
式中:风电机组初始减载输出功率为p
del0
、初始减载转速为ω
del0
;然而其减载比例受到风机最大转子转速限制,风机最大减载量为:
[0067][0068]
式中:v
ij
为风机的输入风速;为风机允许的最大转子转速;
[0069]
步骤3、计算海上风电场黑启动过程中系统有功需求波动值,通过辅助功率补偿方法使风机获得超过最大转速限制的备用容量;考虑海上风电场黑启动过程中系统有功需求波动,在原有转速控制内增加辅助功率补偿环节,扩大频率调节范围,使得风机能够获得超过最大转速限制的备用容量,提高有功功率调节范围;增加的辅助功率补偿环节p
ad
能够根据频率变化率和频率偏差自适应调节,其表达式为:
[0070][0071]
式中:r为辅助功率补偿环节调节阈值,设置阈值避免频率轻微波动造成的辅助功率补偿环节频繁动作;将dω/dt取绝对值是为了使p
ad
调节不受频率变化率符号的,利用δω判断p
ad
调节方向,确保调节利于频率稳定;k为调节补偿系数,该系数的设置需要确保补偿功率调节值不大于最大功率波动值,否则将对系统产生副作用;如图1所示,
[0072]
区间δωdω/dtp
ad
1》0》》0适当增加吸收2》》0》0增加吸收3》》00增加吸收4》》0《0适当减小释放5》0《《0减小释放60《《0不变
7《0《《0适当增加释放8《《0《0增加释放9《《00增加释放10《《0》0适当减小吸收11《0》》0减小吸收120》》0不变
[0073]
表1
[0074]
步骤4、设置辅助功率补偿的补偿系数、触发阈值以及输入量化因子,通过模糊控制方法,使辅助功率补偿在若干个档位吸收功率与释放功率,合理设置辅助功率补偿的表达式和触发阈值,避免频率轻微波动造成的辅助功率补偿环节频繁动作,同时也使得引入的辅助功率补偿环节能够根据频率变化和频率偏差自适应调节,提高有功功率调节速度,对于辅助功率补偿环节的补偿系数和输入量化因子的设置,采用模糊控制的方法,根据场景设置模糊规则,使得辅助功率补偿环节能够在多个档位进行功率的吸收与释放,进一步提高有功功率调节的精度;
[0075]
将指令功率阶跃时的频率偏差和频率变化率划分为多个区间,得出辅助功率补偿环节模糊控制规律表,利用所得规律设计模糊控制器;其中k1和k2为输入量化因子,其中p
ad
的设计逻辑为吸收功率为负值,释放功率为正值;
[0076]
如图4所示,模糊控制器构建步骤包括:模糊化步骤、模糊推理步骤、反模糊化步骤;模糊化步骤:使用量化因子将频率偏差和频率变化率这两个输入变量做归一化处理,k1和k2分别为最大功率波动下的角频率偏差和角频率变化率幅值,则角频率偏差和角频率变化率的基本论域设置为[-1,1];将输出变量的变化范围也设置为[-1,1],代表惯辅助功率补偿环节调节比例u,通过定义隶属度函数可将输入输出转化为模糊变量;关于隶属度函数使用三角形和s型隶属度函数,并将量化后的输入输出划分为五个等级:nl(负大)、ns(负小)、zo(零)、ps(正小)、pl(正大);表2为辅助功率补偿环节模糊控制规则;
[0077][0078]
模糊推理步骤:根据模糊控制规律以及输入输出隶属度函数,设计基于mamdani型的模糊规则;
[0079]
反模糊化步骤:使用重心法对输出进行反模糊化处理,最终得到辅助功率补偿环节调节p
ad
。
[0080]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,
凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1