基于分布式模型预测控制的DFIG有功功率控制方法
基于分布式模型预测控制的dfig有功功率控制方法
技术领域
1.本发明属于风力发电技术领域,更为具体地讲,涉及一种基于分布式模型预测控制的dfig有功功率控制方法。
背景技术:
2.近年来,风电并网电力系统的风电渗透率也逐渐增加,并网容量达到更高的水平,越来越多新能源发电系统并入传统电网,构成了更加复杂的电网系统体系。近些年来电网安全事故时有发生,尤其是自然灾害给风力发电安全带来了许多困难,考虑到风速随机性将给整个系统带来诸多不确定因素,能否克服风速随机变化带来的影响成为风力发电系统安全方面的全新挑战。
3.风力发电技术成本低,发展速度快,是一种可再生的清洁能源利用方式,机具发展前景。风速具有随机性、波动性和间歇性等特点,因此风能的稳定性差,不能储存,且风能和风速之间存在强烈的非线性关系,在建立模型时由于简化处理,忽略了未建模动态,这给系统控制精度带来了严重影响。
4.dfig(doubly fed induction generator,双馈异步风力发电机)是目前风力发电领域应用最为广泛的风力发电机,由定子绕组直连相电网的绕线型异步发电机和安装在转子绕组上的双向背靠背igbt电压源变流器组成。dfig的暂态响应可以看作是一系列复杂的机械暂态响应和电磁暂态响应的耦合,两者在时间上并无先后顺序。由于风轮的巨大惯性,风速的瞬间变化不会导致风力涡轮机的机械量突变,因此研究的时间尺度较长,风力涡轮机的暂态响应主要表现为由风力机输出功率不平衡所引发的发电机转速变化;而发电机的电气量则会因为短路等故障导致突变,因而研究的时间尺度较短,其暂态响应表现为定转子电压、磁链和电流的变化。
5.分布式模型预测控制被广泛应用于处理带有显示输入、输出约束的优化的复杂系统的控制问题,通过代价函数的设计可灵活选择控制目标,通过一系列在线计算实现滚动优化,其控制效果具有较好的鲁棒性,且通过代价函数对控制增量的约束,一定程度上克服了控制保守性。但是由于机械暂态和电磁暂态时间尺度不同这一原因,传统的风机有功功率控制通常以电磁暂态控制为主,即使结合机械暂态也会忽略风速随机性给系统暂态稳定性带来的影响。然而从整体上看,风力发电系统的运行过程具有长期性,如果忽略风速的随机性信息,则不能全面的考虑风速随机变化给系统暂态稳定性带来的影响。
技术实现要素:
6.本发明的目的在于克服现有技术的不足,提供一种基于分布式模型预测控制的dfig有功功率控制方法,基于分布式模型预测控制的控制架构,将dfig看作由风力涡轮机为主的机械设备和以发电机为主的电气设备两部分分别进行控制,控制风轮机系统控制机械暂态,并为电磁暂态控制提供参考值计算,两者同时进行,从而提高控制效果。
7.为了实现上述发明目的,本发明基于分布式模型预测控制的dfig有功功率控制方
法包括以下步骤:
8.s1:获取dfig的历史风机转速序列、历史桨距角序列和历史发电机转矩序列,然后根据预先设置的随机风速模型得到预测时域n
p
内各个时刻的风速,得到风速序列;
9.s2:采用如下方法构建基于随机模型预测的变桨距控制器的控制模型:令风力涡轮机系统状态空间的状态变量x
wt
(k)=[ωm(k) te(k) β(k)]
t
,其中ωm(k)表示时刻k的风机转速,te(k)表示时刻k的发电机转矩,β(k)表示时刻k的桨距角,令控制输入变量其中β
*
(k)表示时刻k的桨距角调节设定值,表示时刻k的发电机转矩调节设定值,上标t表示转置,输出y
wt
(k)=ωm(k),构建风力涡轮机系统状态空间模型如下式所示:
[0010][0011]
其中,x
wt
(k)、x
wt
(k+1)分别表示时刻k和k+1的状态变量,y
wt
(k)表示时刻k的输出,u
wt
(k)表示时刻k的控制输入变量,d(k)表示时刻k的风速值,a
wt
、b
wt
、w
wt
、c
wt
为状态矩阵,表达式分别如下:
[0012][0013][0014][0015]cwt
=[1 0 0]
[0016]
其中,a、b、c表示风轮转矩用泰勒展开后在额定工作点处的线性系数,τe表示调节发电机转矩变化的时间常数,τ
β
表示调节桨距角变化的时间常数;
[0017]
代价函数表达式如下:
[0018][0019]
其中,e()表示求取期望,βe(k)=β
e*
(k)-βe(k),q=diag(q
wt1
),r
δu
=diag(r
wt1
),ru=diag(r
wt2
),q
wt1
和r
wt1
,r
wt2
为各部分预设的权重,diag(z)表示以z为元素的对角矩阵;δu
wt
(k+j)表示时刻k+j的控制输入增量,δu
wt
(k+j)=[δβ(k+j) δte(k+j)]
t
,δβ(k+j)表示时刻k+j时控制输入的桨距角增量,δte(k+j)表示时刻k+j的控制输入的发电机转矩增量,u
wt
(k+j)表示时刻k+j时的控制输入变量,n
p
表示预测时域,nc表示控制时域,nc≤n
p
;
[0020]
约束条件如下:
[0021][0022]
其中:
[0023][0024]
其中,y
wt
(i)表示预测时域n
p
内时刻i的输出,y
wt,constrain
表示输出的取值范围,u
wt
(i)表示预测时域n
p
内时刻i的控制输入变量,u
wt,constrain
表示控制输入变量的取值范围,δu
wt
表示预测时域n
p
内时刻i的控制输入增量,δu
wt,constrain
为控制输入增量的取值范围;
[0025]
ε表示预设阈值且ε>0,pe表示发电机的有功功率,p
e,ref
表示有功功率参考值,采用如下方法确定:根据控制输入变量序列中第一个控制输入变量中的桨距角调节设定值和发电机转矩调节设定值对风力涡轮机进行控制,将得到的风轮转速作为最优风轮转速ω
m,opt
,采用如下公式计算得到最优有功功率参考值p
e,ref
:
[0026][0027]
其中,k
opt
表示最佳功率控制系数;
[0028]
变桨距控制器根据历史风机转速序列、历史桨距角序列和历史发电机转矩序列和风速序列,通过控制模型预测得到预测时域内的控制输入变量序列
[0029]
根据控制输入变量序列中第一个控制输入变量中的桨距角调节设定值和发电机转矩调节设定值对风力涡轮机进行控制,将当前时刻k的风轮转速作为最优风轮转速ω
m,opt
,然后计算得到当前时刻k的最优有功功率参考值p
e,ref
;
[0030]
s3:转子侧变流控制器中的定子外环控制环从变桨距控制器获取最优有功功率参考值p
e,ref
,求解如下方程组得到时刻k定子电流的d轴分量i
sd
(k)和q轴分量i
sq
(k):
[0031][0032]
其中,qs表示当前发电机的无功功率;
[0033]
然后求解如下方程组得到时刻k转子电流参考值的d轴分量和q轴分量
[0034][0035]
其中,lm表示定子和转子绕组间的互感,ls表示定子的自感,ψs表示定子的磁链;
[0036]
采用如下公式预测得到时刻k+1的定子电压预测值的d轴分量u
sd
(k|k+1)和q轴分量u
sq
(k|k+1):
[0037][0038]
其中,u
sd
(k|k+1)、u
sq
(k|k+1)分别表示表示根据时刻k的数据预测得到时刻k+1的定子电压预测值的d轴分量和q轴分量,ω1表示定子转速,i
rd
(k)、i
rq
(k)分别表示时刻k的转子电流的d轴分量和q轴分量、分别表示定子电压补偿项的d轴分量和q轴分量,补偿项的表达式如下式所示;
[0039][0040]
其中,υu表示电压补偿的误差系数;
[0041]
采用如下公式计算得到转子电流控制增量的d轴分量和q轴分量
[0042][0043]
其中,q
sd
、q
sq
、r
sd
、r
sq
分别表示预设的定子控制的权重值,i
sd
(k)、i
sq
(k)分别表示时刻k转子电流控制增量的d轴分量和q轴分量;
[0044]
然后采用如下公式计算转子电流参考值的d轴分量和q轴分量
[0045]
[0046]
s4:转子侧变流控制器中的转子内环控制环从定子外环控制环获取转子电流参考值的d轴分量和q轴分量先采用如下公式预测得到时刻k+1的转子电流预测值的d轴分量i
rd
(k|k+1)和q轴分量i
rq
(k|k+1):
[0047][0048]
其中,t
mpc
表示离散采样时间,rr表示转子电阻,lr表示转子的自感,ωs表示转差速度,u
rd
(k-1)、u
rq
(k-1)分别表示时刻k-1的转子电压的d轴分量和q轴分量,ξ
rd
(k)、ξ
rq
(k)表示转子电流补偿项的d轴分量和q轴分量,表达式如下式所示:
[0049][0050]
其中,υi表示电流补偿项的误差系数;
[0051]
采用如下公式计算得到控制转子电流的转子电压控制增量的d轴分量和q轴分量
[0052][0053]
采用如下公式计算得到控制转子电流的转子电压参考值的d轴分量和q轴分量
[0054][0055]
根据转子电压参考值的d轴分量和q轴分量生成发电机的控制信号,以控制转子电流值,从而实现有功功率控制。
[0056]
本发明基于分布式模型预测控制的dfig有功功率控制方法,获取dfig的历史数据
并到预测时域内的风速序列,构建基于随机模型预测的变桨距控制器的控制模型,预测得到预测时域内的控制输入变量序列,将当前风轮转速作为最优风轮转速,然后计算得到最优有功功率参考值,转子侧变流控制器中的定子外环控制环根据最优有功功率参考值得到转子电流参考值,转子侧变流控制器中的转子内环控制环根据转子电流参考值得到转子电压参考值,根据转子电压参考值生成电机的控制信号,以控制转子电流值,从而实现有功功率控制。
[0057]
本发明具有以下有益效果:
[0058]
(1)与传统方法大多将机械暂态和电磁暂态分开控制不同,本发明利用分布式模型预测控制将机械暂态和电磁暂态联系起来,同时进行控制,提高了控制效果;
[0059]
(2)本发明通过变桨距控制器的模型预测控制可以避免频繁的机械结构变动,有利于保护机械器件;
[0060]
(3)传统方法处理暂态稳定性问题时往往忽略风速的随机性,不能准确模拟真实风力发电机工作场景,控制方法具有一定的保守性,本发明在考虑风速随机信息的基础上进行控制,克服了一定的保守性,增强了鲁棒性。
附图说明
[0061]
图1是本发明中分布式模型预测控制架构图;
[0062]
图2是本发明基于分布式模型预测控制的dfig有功功率控制方法的具体实施方式流程图;
[0063]
图3是本发明和对比方法在发生风速波动和网侧三相故障后并网点的有功功率和节点电压对比曲线图。
具体实施方式
[0064]
下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
[0065]
实施例
[0066]
为了更好地说明本发明的技术方案,首先对本发明中涉及的控制器模型的推导过程进行简要说明。
[0067]
由于dfig的模型复杂,且内部的机械结构和电气结构响应时间不同,因此在引入分布式模型预测控制时存在较大难度。因此本发明对分布式模型预测控制架构进行了适应性改进。图1是本发明中分布式模型预测控制架构图。如图1所示,因此本发明中,将dfig视为由风力涡轮机系统和发电机系统耦合而成,利用分布式模型预测控制理论针对两个子系统分别设计独立的控制器,其中风力涡轮机系统采用基于随机模型预测控制(stochastic model predictive control,smpc)的变桨距控制器,设置在风力涡轮机侧,用于对风力涡轮机的桨距角和发电机转矩进行控制,令风力涡轮机的转速稳定;发电机系统采用基于模型预测控制(model predictive control,mpc)的转子侧变流控制器,设置在转子侧变流器处,用于确定控制转子电流的转子电压参考值,从而实现有功功率控制。
[0068]
在大型风力发电系统中,变桨距控制系统属于其中的核心组成部分,用来维持转
速和功率稳定,进而保障机组运行的稳定、安全和高效。传统的变桨距控制器设计以pid控制为主,基于pid控制的变桨距控制器响应较快,在风速变化较为平缓的环境下可取得较好的控制效果。为了适应更复杂的工作环境,本发明充分利用风速的随机性信息,采用基于随机模型预测控制理论的变桨距控制器,控制桨距角和发电机转矩实现以下目标:
[0069]
(1)低风速区域限制风轮的最小转速,获取最大风能;
[0070]
(2)额定风速区域保持风轮转速稳定,实现发电机输出功率平滑;
[0071]
(3)高风速区域限制最大功率和风轮最大转速,保护机械系统,防止机械结构损伤和功率过大。
[0072]
在设计变桨距控制器中,需要针对风力机模型和实际运行条件设计代价函数。本发明为了解决风速随机波动带来的输入输出波动性问题,在原有约束的基础上,将约束形式修改为概率约束,即允许系统按照一定的概率违反约束条件,这样既可以避免整体约束条件放宽带来的保守性,又能保护风力机中的相关机械组件。在风力涡轮机系统的模型推导时,利用了泰勒公式将风轮机械转矩线性化,因此系数矩阵中带有随机项。
[0073]
本发明中,令风力涡轮机系统状态空间的状态变量x
wt
(k)=[ωm(k) te(k) β(k)]
t
,其中ωm(k)表示时刻k的风机转速,te(k)表示时刻k的电机转矩,β(k)表示时刻k的桨距角,令控制输入变量其中β
*
(k)表示时刻k的桨距角调节设定值,表示时刻k的电机转矩调节设定值,上标t表示转置,输出y
wt
(k)=ωm(k),将随机风速值d(k)作为加型随机扰动,构建得到风力涡轮机系统状态空间模型如下式所示:
[0074][0075]
其中,x
wt
(k)、x
wt
(k+1)分别表示时刻k和k+1的状态变量,y
wt
(k)表示时刻k的输出,u
wt
(k)表示时刻k的控制输入变量,d(k)表示时刻k的风速值,a
wt
、b
wt
、w
wt
、c
wt
为状态矩阵,表达式分别如下:
[0076][0077][0078][0079]cwt
=[1 0 0]
[0080]
其中,a、b、c表示风轮转矩用泰勒展开后在额定工作点处的线性系数,可以采用如下表达式表示:
[0081][0082]
v0表示额定工作点的风速,ω0表示额定工作点的风机转速,β0表示额定工作点的桨距角。
[0083]
τe表示调节发电机转矩变化的时间常数,τ
β
表示表示调节桨距角变化的时间常数。
[0084]
变桨距控制器的控制目标是风轮转速快速跟踪参考值,并且桨距角增量不超过一定的范围,与此同时要保证桨距角作为输入量和风轮转速作为输出量时不超过约束值,这样也可避免机械传动结构频繁变化。由于本发明中风力涡轮机系统为带有随机干扰项(随机风速)的不确定性系统,因此设计出的变桨距代价函数为期望的形式,表达式为:
[0085][0086]
其中,e()表示求取期望,βe(k)=β
e*
(k)-βe(k),q=diag(q
wt1
),r=diag(r
wt1
),ru=diag(r
wt2
),q
wt1
和r
wt1
,r
wt2
为各部分预设的权重,diag(z)表示以z为元素的对角矩阵;δu
wt
(k+j)表示时刻k+j的控制输入增量,δu
wt
(k+j)=[δβ(k+j) δte(k+j)]
t
,δβ(k+j)表示时刻k+j时控制输入的桨距角增量,δte(k+j)表示k+j时控制输入的发电机转矩增量,u
wt
(k+j)表示时刻k+j时控制输入变量,n
p
表示预测时域,nc表示控制时域,nc≤n
p
。
[0087]
被控输入、输出的整体约束设置为高于额定值的比例λ(本实施例中λ为10%),桨距角增量设置为δβ
*
≤θ(本实施例中θ为5
°
),电机转矩增量设置为δt
e*
≤τ(本实施例中τ=540n
·
m),这样设计是为了保护机械结构,减少机械传动结构的频繁变化。由于随机风速作为干扰项,使系统成为不确定性系统,硬约束会导致优化问题无法求解,因此采用概率约束的形式:规定在预测时域n
p
内,允许系统输入、输出、控制量的增量以一定的概率超过原λ的约束,以概率的形式给出的约束如下式所示。
[0088][0089]
由于计算时系统采用离散形式,因此给出离散下的约束条件如下式所示。
[0090][0091]
其中:
[0092][0093]
其中,y
wt
(i)表示预测时域n
p
内时刻i的输出,y
wt,constrain
表示输出的取值范围,u
wt
(i)表示预测时域n
p
内时刻i的控制输入变量,u
wt,constrain
表示控制输入变量的取值范围,δu
wt
表示预测时域n
p
内时刻i的控制输入增量,δu
wt,constrain
为控制输入增量的取值范围。这三个取值范围是由双馈风力发电机的自身参数确定的。
[0094]
此外,为了实现发电机有功功率的反馈控制闭环,在变桨距控制器控制模型中,本发明还在约束条件中增加了当前的有功功率实际值pe和控制得到的最优有功功率参考值p
e,ref
的差值约束,其表达式如下:
[0095]
|p
e-p
e,ref
|<ε
[0096]
其中,ε表示预设阈值且ε>0,一般来说为了控制的平滑,阈值ε不会太大。有功功率参考值p
e,ref
采用如下方法确定:根据控制输入变量序列中第一个控制输入变量中的桨距角调节设定值和电机转矩调节设定值对风力涡轮机进行控制,将得到的风轮转速作为最优风轮转速ω
m,opt
,采用如下公式计算得到最优有功功率参考值p
e,ref
:
[0097][0098]
其中,k
opt
表示最佳功率控制系数,由最佳风能利用曲线得到。
[0099]
综上所述,可以基于随机模型预测控制理论构建变桨距控制器c1的控制模型:
[0100]
状态空间方程的表达式如下:
[0101][0102]
代价函数表达式如下:
[0103][0104]
约束条件包括:
[0105][0106]
变桨距控制器求解上述优化问题,即可得到最优控制序列从而实现对风力涡轮机的控制。本实施例中,该优化问题采用内点法求解,内点法是一种常用的优化问题求解方法,其具体过程在此不再赘述。
[0107]
将最优控制序列中第一个控制输入,对风力涡轮机进行控制,将控制后风力涡轮机的风轮转速作为最优风轮转速ω
m,opt
,然后计算得到有功功率最优参考值p
e,ref
。
[0108]
接下来对转子侧变流控制器的控制模型的推导过程进行简要说明。
[0109]
dfig并网后,在并网点处,定子电压等于电网电压,此时dfig网侧的有功功率和无功功率可表示为下式。
[0110][0111]
其中,ps、qs分别表示有功功率和无功功率,u
sd
、u
sq
分别表示定子电压的d轴分量和q轴分量,i
sd
、i
sq
分别表示定子电流的d轴分量和q轴分量。
[0112]
采用定子电压矢量定向(即将d、q坐标系的轴定为电网电压的方向),定子电压的q轴分量u
sq
=0,可将上式改写为下式。
[0113][0114]
当基于随机模型预测控制的变桨距子控制器计算出最优有功功率参考值后p
e,ref
,即可采用公式结合上述公式得到定子电流的d轴分量和q轴分量,再利用基于模型预测控制的转子侧变流子控制器计算出转子电流参考值和转子电压参考值,从而通过调节转子电流控制双馈风机的有功功率。
[0115]
并网后的定子电压等于电网电压,定子电流d、q轴分量改写为下式,即可通过网侧有功功率的关系计算转子侧电流的参考值。
[0116][0117]
其中,i
rd
、i
rq
表示转子电流的d轴分量和q轴分量,lm表示定子和转子绕组间的互感,ls表示定子的自感,ψs表示定子的磁链。
[0118]
并可推导出新的转子磁链关系表达式如下式所示:
[0119][0120]
其中,ψ
rd
、ψ
rq
分别表示转子磁链的d轴分量和q轴分量;lr表示转子的自感,
[0121]
转子电流控制器的控制目标是通过控制转子电流以达到控制有功功率的目的,根据双馈风力发电机的原理知识可知,转子电流控制器采用了双闭环结构,外层为定子外环控制环,内层为转子内环控制环,有功功率参考值p
e,ref
由变桨距控制器给出,定子外环控制环根据有功功率参考值计算出转子电流参考值环根据有功功率参考值计算出转子电流参考值转子内环控制环根据转子电流参考值计算出转子电压最优控制量然后通过控制转子电压调整转子电流,最后达到控制有功功率的目的。因此本发明需要设计定子外环代价函数和转子内环代价函数两部分。定子外环控制环控制定子电压快速跟踪参考值,且转子电流控制增量尽可能小,因此本发明设置定子外环的代价函数如下式所示:
[0122][0123]
其中,分别表示时刻k的定子电压参考值的d轴分量和q轴分量,u
sd
(k|k+j)、u
sq
(k|k+j)分别表示根据时刻k的数据预测得到时刻k+j的定子电压预测值的d轴分量和q轴分量,δi
rd
(k)、δi
rq
(k)分别表示时刻k的转子电流增量的d轴分量和q轴分量,q
sd
、q
sq
、r
sd
、r
sq
分别表示预设的定子外环控制的权重值。电压电流矢量在解耦过程中会产生耦合项,所以为了消除交叉耦合项带来的影响,预测值计算出的结果包括定子电压预测值和针对交叉耦合项的补偿项,如下式所示。
[0124][0125]
其中,u
sd
(k|k+1)、u
sq
(k|k+1)分别表示表示根据时刻k的数据预测得到时刻k+1的定子电压预测值的d轴分量和q轴分量,ω1表示定子转速,i
rd
(k)、i
rq
(k)分别表示时刻k的转
子电流的d轴分量和q轴分量、分别表示定子电压补偿项的d轴分量和q轴分量,补偿项的表达式如下式所示。
[0126][0127]
其中,υu表示电压补偿的误差系数。
[0128]
求解定子外环优化问题,可求出控制定子电压的最优转子电流增量如下式所示:
[0129][0130]
结合上式求出的转子电流最优增量,可以推导出转子电流参考值如下式所示。
[0131][0132]
通过基于模型预测控制的定子外环控制环计算出转子电流参考值后,转子内环控制环需要通过调节转子电压达到控制转子电流的目的,控制目标为使转子电流迅速跟踪参考值,且转子电压增量不能过大,由此可以设计出转子内环控制环的代价函数如下式所示。
[0133][0134]
其中,u
rd
(k|k+j)、u
rq
(k|k+j)分别表示根据时刻k的数据预测得到时刻k+j的转子电压预测值的d轴分量和q轴分量,δu
rd
(k)、δu
rq
(k)分别表示时刻k的转子电流增量的d轴分量和q轴分量,q
rd
、q
rq
、r
rd
、r
rq
分别表示预设的转子控制的权重值。
[0135]
电压电流矢量在解耦过程中会产生耦合项,所以为了消除交叉耦合项带来的影响,转子电流预测值计算出的结果包括转子电流预测值和针对交叉耦合项的补偿项,如下式所示。
[0136][0137]
其中,i
rd
(k|k+1)、i
rq
(k|k+1)分别表示根据时刻k的数据预测得到时刻k+1的转子电流预测值的d轴分量和q轴分量,t
mpc
表示模型预测控制mpc算法里的离散采样时间,rr表示转子电阻,lr表示转子的自感,ωs表示转差速度,u
rd
(k-1)、u
rq
(k-1)分别表示时刻k-1的转子电压的d轴分量和q轴分量,ξ
rd
(k)、ξ
rq
(k)表示转子电流补偿项的d轴分量和q轴分量,表达式如下式所示:
[0138][0139]
其中,υi表示电流补偿项的误差系数。
[0140]
求解转子电流内环优化问题,可求出控制转子电流的最优转子电压增量如下式所示:
[0141][0142]
结合上式求出的转子电压最优增量,可以推导出转子电压参考值如下式所示:
[0143][0144]
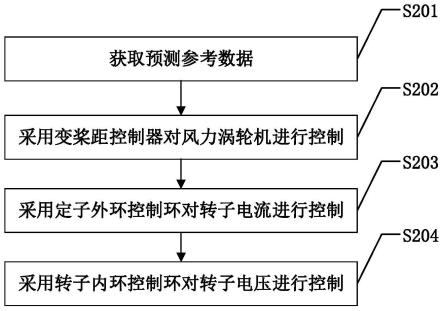
基于以上推导过程,本发明提出了基于分布式模型预测控制的双dfig有功功率控制方法。图2是本发明基于分布式模型预测控制的dfig有功功率控制方法的具体实施方式流程图。如图2所示,基于分布式模型预测控制的dfig有功功率控制方法的具体步骤包括:
[0145]
s201:获取预测参考数据:
[0146]
获取dfig的历史风机转速序列、历史桨距角序列和历史电机转矩序列,然后根据预先设置的随机风速模型得到预测时域n
p
内各个时刻的风速,得到风速序列。
[0147]
由于随机风速的存在,测得的历史风机转速序列、历史桨距角序列和历史电机转矩序列存在随机扰动,可能会造成控制结果不收敛,因此在实际应用中,可以采用卡尔曼滤波对历史风机转速序列、历史桨距角序列和历史电机转矩序列进行滤波处理。
[0148]
为了提升风速的随机性,本实施例中风速模型采用平均风加扰动风合成,表达式为v(k)=vm+v
t
,v(k)表示时刻k的风速,vm表示平均风分量,v
t
表示扰动风分量,其中平均风分量的初值服从weibull分布,概率密度函数如下式所示。
[0149][0150]
其中,γ》0是预设的比例参数,μ>0为预设的形状参数,平均风vm的均值e(vm)和方
差d(vm)分别表示:
[0151][0152]
其中,γ()表示伽马函数。
[0153]
扰动风分量v
t
可看做高斯白噪声,表达风速模型中剧烈变化的随机量,表达式如下式所示:
[0154][0155]
也就是说,扰动风分量v
t
的瞬时值服从均值为0、标准差为的高斯分布。
[0156]
s202:采用变桨距控制器对风力涡轮机进行控制:
[0157]
首先采用如下方法构建变桨距控制器的控制模型:令风力涡轮机系统状态空间的状态变量x
wt
(k)=[ωm(k) te(k) β(k)],其中ωm(k)表示时刻k的风机转速,te(k)表示时刻k的电机转矩,β(k)表示时刻k的桨距角,令控制输入变量其中β
*
(k)表示时刻k的桨距角调节设定值,表示时刻k的电机转矩调节设定值,上标t表示转置,输出y
wt
(k)=ωm(k),构建风力涡轮机系统状态空间模型如下式所示:
[0158][0159]
其中,x
wt
(k)、x
wt
(k+1)分别表示时刻k和k+1的状态变量,y
wt
(k)表示时刻k的输出,u
wt
(k)表示时刻k的控制输入变量,d(k)表示时刻k的风速值,a
wt
、b
wt
、w
wt
、c
wt
为状态矩阵,表达式分别如下:
[0160][0161][0162][0163]cwt
=[1 0 0]
[0164]
其中,a、b、c表示风轮转矩用泰勒展开后在额定工作点处的线性系数,τe表示调节发电机转矩变化的时间常数,τ
β
表示调节桨距角变化的时间常数。
[0165]
代价函数表达式如下:
[0166]
[0167]
其中,e()表示求取期望,βe(k)=β
e*
(k)-βe(k),q=diag(q
wt1
),r=diag(r
wt1
),ru=diag(r
wt2
),q
wt1
和r
wt1
,r
wt2
为各部分预设的权重,diag(z)表示以z为元素的对角矩阵。δu
wt
(k+j)表示时刻k+j的控制输入增量,δu
wt
(k+j)=[δβ(k+j) δte(k+j)]
t
,δβ(k+j)表示时刻k+j时控制输入的桨距角增量,δte(k+j)表示时刻k+j的控制输入的发电机转矩增量,u
wt
(k+j)表示时刻k+j时控制输入变量,n
p
表示预测时域,nc表示控制时域,nc≤n
p
。
[0168]
约束条件如下:
[0169][0170]
其中:
[0171][0172]
其中,y
wt
(i)表示预测时域n
p
内时刻i的输出,y
wt,constrain
表示输出的取值范围,u
wt
(i)表示预测时域n
p
内时刻i的控制输入变量,u
wt,constrain
表示控制输入变量的取值范围,δu
wt
表示预测时域n
p
内时刻i的控制输入增量,δu
wt,constrain
为控制输入增量的取值范围。
[0173]
ε表示预设阈值且ε>0,pe表示发电机的有功功率,p
e,ref
表示有功功率参考值,采用如下方法确定:根据控制输入变量序列中第一个控制输入变量中的桨距角调节设定值和电机转矩调节设定值对风力涡轮机进行控制,将得到的风轮转速作为最优风轮转速ω
m,opt
,采用如下公式计算得到最优有功功率参考值p
e,ref
:
[0174][0175]
变桨距控制器根据历史桨距角、历史风轮转速和风速序列,通过控制模型预测得到预测时域内的控制输入变量序列
[0176]
根据控制输入变量序列中第一个控制输入变量中的桨距角调节设定值和电机转矩调节设定值对风力涡轮机进行控制,将当前时刻k的风轮转速作为最优风轮转速ω
m,opt
,然后计算得到当前时刻k的最优有功功率参考值p
e,ref
。
[0177]
s203:采用定子外环控制环对转子电流进行控制:
[0178]
转子侧变流控制器中的定子外环控制环从变桨距控制器获取最优有功功率参考值p
e,ref
,求解如下方程组得到时刻k定子电流的d轴分量i
sd
(k)和q轴分量i
sq
(k):
[0179][0180]
其中,qs表示当前发电机的无功功率。
[0181]
然后求解如下方程组得到时刻k转子电流参考值的d轴分量和q轴分量
[0182][0183]
其中,lm表示定子和转子绕组间的互感,ls表示定子的自感,ψs表示定子的磁链。
[0184]
采用如下公式预测得到时刻k+1的定子电压预测值的d轴分量u
sd
(k|k+1)和q轴分量u
sq
(k|k+1):
[0185][0186]
其中,u
sd
(k|k+1)、u
sq
(k|k+1)分别表示表示根据时刻k的数据预测得到时刻k+1的定子电压预测值的d轴分量和q轴分量,ω1表示定子转速,i
rd
(k)、i
rq
(k)分别表示时刻k的转子电流的d轴分量和q轴分量、分别表示定子电压补偿项的d轴分量和q轴分量,补偿项的表达式如下式所示。
[0187][0188]
其中,υu表示表示电压补偿的误差系数。
[0189]
采用如下公式计算得到转子电流控制增量的d轴分量和q轴分量
[0190][0191]
其中,q
sd
、q
sq
、r
sd
、r
sq
分别表示预设的定子控制的权重值,i
sd
(k)、i
sq
(k)分别表示时刻k转子电流控制增量的d轴分量和q轴分量。
[0192]
然后采用如下公式计算转子电流参考值的d轴分量和q轴分量
[0193][0194]
s204:采用转子内环控制环对转子电压进行控制:
[0195]
转子侧变流控制器中的转子内环控制环从定子外环控制环获取转子电流参考值的d轴分量和q轴分量先采用如下公式预测得到时刻k+1的转子电流预测值的d轴分量i
rd
(k|k+1)和q轴分量i
rq
(k|k+1):
[0196][0197]
其中,t
mpc
表示离散采样时间,rr表示转子电阻,lr表示转子的自感,ωs表示转差速度,u
rd
(k-1)、u
rq
(k-1)分别表示时刻k-1的转子电压的d轴分量和q轴分量,ξ
rd
(k)、ξ
rq
(k)表示转子电流补偿项的d轴分量和q轴分量,表达式如下式所示:
[0198][0199]
其中,υi表示电流补偿项的误差系数。
[0200]
采用如下公式计算得到控制转子电流的转子电压控制增量的d轴分量和q轴分量
[0201][0202]
采用如下公式计算得到控制转子电流的转子电压参考值的d轴分量和q轴分量
[0203]
[0204]
根据转子电压参考值的d轴分量和q轴分量生成电机的控制信号,以控制转子电流值,从而实现有功功率控制。
[0205]
为了说明本发明的技术效果,采用具体实例对本发明进行实验验证。本实施例中将40台1.5mw风机组成的容量为60mw的风电机组以直接并入电网的方式并入3机9节点标准电网模型中的5号节点处,设置风速湍流强度为0.1,并在网侧设置三相短路接地故障,故障开始时间为20.5s,故障持续时间为0.1s。采用使用传统模型预测控制mpc理论设计的控制策略(变桨距控制器和转子侧变流控制器的设计均只采用mpc法)作为对比方法,和本发明的分布式模型预测控制策略进行有功功率控制比较。图3是本发明和对比方法在发生风速波动和网侧三相故障后并网点的有功功率和节点电压对比曲线图。如图3所示,当三相故障发生后,双馈风机输出的有功功率会发生瞬间跌落,后续逐渐恢复稳定,由于随机风的干扰,在有功功率恢复的过程中存在一定的波动,整体风机的出力仍然较低。根据电力系统知识,有功功率会影响电压的变化,仿真结果与之对应。在传统的模型预测控制mpc控制策略下,有功功率的恢复过程较慢,主要是因为抵抗风速随机波动影响的能力较弱,24s左右恢复稳定,从而导致并网点电压恢复较慢,且受到随机风速扰动的影响体现的更明显;采用本实施所述的分布式模型预测控制策略后,dfig有功功率在23s左右恢复,速度更快,由于本发明中变桨距控制器的设计采用随机模型控制smpc理论,充分考虑了风速随机性信息,对风速随机波动的抑制效果更加明显,且转子侧变流控制器的设计采用了模型预测控制mpc理论,有功功率控制的响应更快,系统在故障后恢复的速度也更快。
[0206]
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1