一种同步磁阻电机的动态扭矩驱动方法与流程
1.本发明属于电机控制技术领域,具体涉及一种同步磁阻电机的动态扭矩驱动方法。
背景技术:
2.近年来,为了减少汽车尾气排放对环境的影响,世界各地的学者都对电动汽车进行了大量的研究。交通电气化可以减少对化石燃料的依赖,缓解气候变化,但电动汽车消耗的能源数量和成本也不容忽视,提高电动汽车动力系统的效率对增加续航里程和降低总能耗至关重要。尽管配备稀土磁体的电机峰值效率可以超过90%,但实际的驱动循环和动力系统经常在峰值效率区域外运行,如在电动汽车最大扭矩的10%时,效率通常仅有70%左右。此外,高效率的电动机使用含大量钕或钐的磁铁,这两种磁铁价格昂贵,增加了较高的成本。而同步磁阻电机不需要永磁体材料,仅利用转子上直轴和交轴方向磁阻不等产生磁阻转矩,且具有工艺简单、材料成本低等优点,然而也存在轻载下效率损失的问题。因此,通过合理的控制提高同步磁阻电机的运行效率,具有重要研究意义。
技术实现要素:
3.针对上述现有技术的不足,本发明的目的在于提供一种减小同步磁阻电机轻载时效率损失的动态扭矩驱动方法,该方法可以增加电动汽车续航里程,同时降低总能耗,并且不需要对电机或车辆进行硬件更改。
4.为实现上述目的,本发明采用的技术方案包括以下步骤:
5.步骤1:根据电机输入功率和输出功率,测定扭矩/速度-系统效率分布图;
6.步骤2:根据电机当前反馈转速,由离线测定的系统效率分布图进行查表获取当前速度下产生最高效率的扭矩值;
7.步骤3:根据期望扭矩判断采用传统驱动方法或动态扭矩驱动方法;
8.步骤4:根据期望扭矩和产生最高效率的扭矩,计算获得动态驱动方法所需要的占空比;
9.步骤5:根据所述动态驱动占空比,将恒值扭矩指令进一步调制成动态扭矩指令;
10.步骤6:将动态扭矩指令发送至传统的扭矩控制器,完成闭环控制。
11.进一步地,所述步骤1具体为:
12.为了测定扭矩/速度-系统效率分布图,将同步磁阻电机运行在不同转速下进行负载实验,根据输入至逆变器的电压和电流计算输入功率,输入功率可通过下式表示:
13.其中pin为输入功率,u为逆变器输入电压,i为逆变器输入电流,为功率因数,感性负载通常取0.7~0.85之间。
14.输出功率可通过下式表示:
15.pout=trqfdb*spdfdb/9.55,其中pout为输出功率,trqfdb为电机当前转矩,spdfdb为电机当前转速。
16.根据电机输入功率和输出功率,即可计算特定转速/扭矩点的效率值,电机效率可通过下式表示:
17.eff=pout/pin*100%,其中eff为效率。
18.进一步地,所述步骤2具体为:
19.根据电机当前反馈转速spdfdb,由离线测定的扭矩/速度-系统效率分布图,可查表获取该转速下产生峰值效率effmax的扭矩值trqa,即在当前转速下给定扭矩为trqa时能够达到电机的最佳效率。
20.进一步地,所述步骤3具体为:
21.根据期望扭矩判断是否采用动态扭矩驱动方法,当期望扭矩trqref高于产生峰值效率的扭矩trqa时,采用传统的扭矩驱动方法;当期望扭矩trqref低于产生峰值效率的扭矩trqa时,则采用动态扭矩驱动方法。
22.进一步地,所述步骤4具体为:
23.根据期望扭矩trqref和产生峰值效率的扭矩trqa,可以通过下式计算出动态驱动方法下所需要的占空比:
24.duty=trqref/trqa,duty为动态驱动占空比,此时期望扭矩trqref低于产生峰值效率的扭矩trqa,则动态驱动占空比duty始终小于1。
25.进一步地,所述步骤5具体为:
26.根据步骤4所述的动态驱动占空比duty,以及设定的动态驱动频率freq,将恒值扭矩指令trqref调制成动态扭矩指令trqout,动态扭矩指令trqout为在提供峰值效率的扭矩trqa和零扭矩之间振荡的方波,该方波满足以下式子:
27.trqref/freq=trqa*duty/freq,可见动态驱动方波以脉冲的形式使电机运行在最佳效率点的同时,达到与期望扭矩相同的控制效果。
28.进一步地,所述步骤6具体为:
29.根据步骤5所述的动态扭矩指令trqout,以一系列的脉冲方波发送至传统的扭矩控制器,并根据反馈电流、电压和转速,计算完成扭矩的闭环控制,使电机间歇地运行在最佳效率点上。
30.与现有技术相比,本发明提出的同步磁阻电机动态扭矩驱动方法具有如下效果:
31.1、本发明针对低扭矩需求下的电机效率损失,通过在峰值效率点间歇运行电机的方式,可以提高轻载时的运行效率,降低总能耗;
32.2、本发明从控制算法的角度改进了扭矩驱动方式,无需对电机结构和硬件电路进行更改,方法简便且易于实施;
33.3、本发明相比于通过配备稀土材料而提高运行效率的电机,减小了对永磁体材料的依赖,因此无失磁风险且成本更低。
附图说明
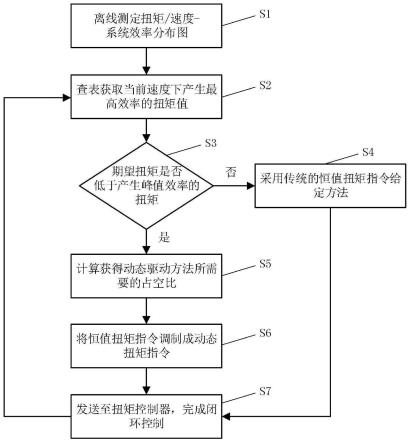
34.图1为本发明的动态扭矩驱动方法流程图;
35.图2为本发明的动态扭矩驱动方法控制框图;
36.图3为本发明的电机扭矩/速度-效率分布图;
37.图4为本发明的动态扭矩指令示意图。
具体实施方式
38.下面结合附图对本发明作进一步详细说明。以下具体实施例仅仅是对本发明的解释,而不是对本发明的限制。
39.本发明实施例中,提供一种同步磁阻电机的动态扭矩驱动方法,其流程如图1所示,包括以下步骤:步骤s1,根据电机输入功率和输出功率,测定扭矩/速度-系统效率分布图;步骤s2,根据电机当前反馈转速,由离线测定的系统效率分布图进行查表获取当前速度下产生最高效率的扭矩值;步骤s3~s4,根据期望扭矩判断采用传统驱动方法或动态扭矩驱动方法;步骤s5,根据期望扭矩和产生最高效率的扭矩,计算获得动态驱动方法所需要的占空比;步骤s6,根据所述动态驱动占空比,将恒值扭矩指令进一步调制成动态扭矩指令;步骤s7,将动态扭矩指令发送至传统的扭矩控制器,完成闭环控制。
40.进一步地,所述步骤s1具体为:
41.为了测定扭矩/速度-系统效率分布图,将同步磁阻电机运行在不同转速下进行负载实验,根据输入至逆变器的电压和电流计算输入功率,输入功率可通过下式表示:
42.其中pin为输入功率,u为逆变器输入电压,i为逆变器输入电流,为功率因数,感性负载通常取0.7~0.85之间。
43.输出功率可通过下式表示:
44.pout=trqfdb*spdfdb/9.55,其中pout为输出功率,trqfdb为电机当前转矩,spdfdb为电机当前转速。
45.根据电机输入功率和输出功率,即可计算特定转速/扭矩点的效率值,电机效率可通过下式表示:
46.eff=pout/pin*100%,其中eff为效率,最终可获得如图3所示的扭矩/速度-效率分布图。
47.进一步地,所述步骤s2具体为:
48.根据电机当前反馈转速spdfdb,由离线测定的扭矩/速度-系统效率分布图,可查表获取该转速下产生峰值效率effmax的扭矩值trqa,即在当前转速下给定扭矩为trqa时能够达到电机的最佳效率。该实施例电机运行在1000rpm下,1000rpm下产生峰值效率的扭矩值为44nm,即:
49.spdfdb=1000rpm;effmax=96%;trqa=44nm;
50.进一步地,所述步骤s3~s4具体为:
51.根据期望扭矩判断是否采用动态扭矩驱动方法,当期望扭矩trqref高于产生峰值效率的扭矩trqa时,采用传统的扭矩驱动方法;当期望扭矩trqref低于产生峰值效率的扭矩trqa时,则采用动态扭矩驱动方法。该实施例的期望扭矩为16nm,即:
52.trqref=16nm《trqa=44nm,则采用动态扭矩驱动方法。
53.进一步地,所述步骤s5具体为:
54.根据期望扭矩trqref和产生峰值效率的扭矩trqa,可以通过下式计算出动态驱动方法下所需要的占空比:
55.duty=trqref/trqa=16nm/44nm=0.364,则动态驱动占空比为0.364。
56.进一步地,所述步骤s6具体为:
57.根据步骤s5所述的动态驱动占空比duty,以及设定的动态驱动频率freq,将恒值
扭矩指令trqref调制成动态扭矩指令trqout。如图4所示,动态扭矩指令trqout为在提供峰值效率的扭矩44nm和零扭矩0nm之间振荡的方波。本实施例的动态驱动频率设定为15hz,则固定周期内扭矩44nm和0nm的指令给定时间分别为:
58.t1=duty/freq=0.364/15hz=0.02427s
59.t2=1/freq-t1=1/15hz-0.02427s=0.0424s
60.可见动态驱动方波以脉冲的形式使电机运行在最佳效率点的同时,达到与期望扭矩相同的控制效果。
61.进一步地,所述步骤s7具体为:
62.根据步骤s6所述的动态扭矩指令trqout,以一系列的脉冲方波发送至传统的扭矩控制器,并根据反馈电流、电压和转速,计算完成扭矩的闭环控制,最终行程如图2所示的控制结构,使电机间歇地运行在最佳效率点上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1