一种电力输送电缆除冰工业机器人的制作方法
1.本发明属于电缆维护装置技术领域,尤其涉及一种电力输送电缆除冰工业机器人。
背景技术:
2.目前在进行远距离通讯传输时,都是通过在一定距离内建设信号塔,将电力电缆假设在空中,在北方地区或冬季南方雪灾降临时,很容易在电力电缆的表面结冰,导致电力电缆的重量增大,易造成通讯练练受力过大而发生断裂,而电力电缆覆冰一直是国内外通讯系统发生故障的重要影响因素之一。
3.传统的除冰方法都是通过人力进行除冰,这样的除冰方式相对来说安全性较低,并且需要根据天气和环境因素来选择性工作,从而需要大量的准备时间,费时费力,为此我们提供了一种电力输送电缆除冰工业机器人。
技术实现要素:
4.本发明实施例的目的在于提供一种电力输送电缆除冰工业机器人,旨在解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种电力输送电缆除冰工业机器人,包括壳体,还包括除冰机构,所述除冰机构用于将电缆上的冰除去,所述除冰机构包括用于通过间歇旋转的方式进行除冰的破冰齿和用于通过往复敲打的方式进行除冰的敲击头,所述除冰机构还包括用于带动破冰齿间歇旋转和带动敲击头往复摆动的驱动结构;前行结构,所述前行结构用于带动除冰机构在电缆上移动。
6.进一步的,所述驱动结构包括电机一,所述电机一安装于连接座上,所述电机一的输出端设有转柄,所述转柄上固定连接有滑动头,所述滑动头与滑槽滑动连接,所述滑槽开设于摆动板内,所述摆动板的末端固定连接有固定杆,所述固定杆上固定连接有敲击头,所述摆动板与旋转板固定连接,所述旋转板的末端与连接座转动连接,所述旋转板的侧壁上固定连接有若干啮合齿。
7.进一步的,所述破冰齿设于转动板的侧壁上,所述转动板的中心轴末端固定连接有齿轮,所述齿轮与啮合齿啮合连接,所述齿轮与连接座转动连接。
8.进一步的,所述连接座固定设于箱体内,所述箱体通过固定座与壳体固定连接。
9.进一步的,所述除冰机构设有两个,两个除冰机构分别设于电缆的两侧。
10.进一步的,所述前行结构包括电机二,所述电机二的输出端设有皮带轮一,所述皮带轮一通过传动皮带与皮带轮二连接,所述皮带轮二的中心轴末端设有主动轮,所述主动轮与电缆的下表面传动连接,所述主动轮活动安装于壳体上,所述壳体内活动安装有从动轮,所述从动轮与电缆的上表面传动连接。
11.进一步的,所述壳体内固定连接有固定台,且所述壳体的底部设有落冰槽。
12.与现有技术相比,本发明的有益效果是:该电力输送电缆除冰工业机器人,通过设置除冰机构通过间歇旋转和往复敲打的方式除冰,除冰效果好,且除冰效率高,前行结构能够带动除冰机构沿着电缆前行,该机器人能够代替人工除冰,提高安全性,并且不需要根据天气和环境因素来选择性工作,省时省力。
附图说明
13.图1为电力输送电缆除冰工业机器人的结构示意图。
14.图2为电力输送电缆除冰工业机器人中部分除冰机构的剖视结构示意图。
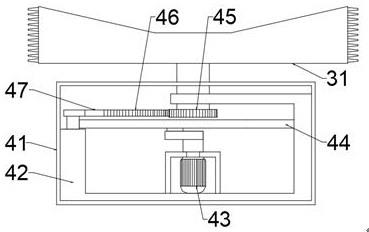
15.图3为电力输送电缆除冰工业机器人中驱动结构的俯视结构示意图。
16.图4为电力输送电缆除冰工业机器人中壳体的剖视结构示意图。
17.图中:01-壳体,11-从动轮,12-主动轮,13-传动皮带,14-皮带轮一,15-电机二,16-固定台,17-皮带轮二,18-落冰槽,02-敲击头,31-转动板,32-破冰齿,41-箱体,42-连接座,43-电机一,44-摆动板,45-齿轮,46-啮合齿,47-旋转板,48-滑动头,49-滑槽,51-固定座,52-固定杆,53-转柄。
具体实施方式
18.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
19.以下结合具体实施例对本发明的具体实现进行详细描述。
20.如图1-4所示,为本发明一个实施例提供的一种电力输送电缆除冰工业机器人,包括壳体01,还包括除冰机构,所述除冰机构用于将电缆上的冰除去,所述除冰机构包括用于通过间歇旋转的方式进行除冰的破冰齿32和用于通过往复敲打的方式进行除冰的敲击头02,所述除冰机构还包括用于带动破冰齿32间歇旋转和带动敲击头02往复摆动的驱动结构;前行结构,所述前行结构用于带动除冰机构在电缆上移动。
21.在本发明实施例中,优选的,壳体01的两端开设有供电缆穿过的槽。具体的,除冰机构通过间歇旋转和往复敲打的方式除冰,除冰效果好,且除冰效率高,前行结构能够带动除冰机构沿着电缆前行,因此该机器人能够代替人工除冰,提高安全性,并且不需要根据天气和环境因素来选择性工作,省时省力。
22.如图1-3所示,作为本发明的一种优选实施例,所述驱动结构包括电机一43,所述电机一43安装于连接座42上,所述电机一43的输出端设有转柄53,所述转柄53上固定连接有滑动头48,所述滑动头48与滑槽49滑动连接,所述滑槽49开设于摆动板44内,所述摆动板44的末端固定连接有固定杆52,所述固定杆52上固定连接有敲击头02,所述摆动板44与旋转板47固定连接,所述旋转板47的末端与连接座42转动连接,所述旋转板47的侧壁上固定连接有若干啮合齿46。
23.在本发明实施例中,优选的,箱体41内开设有供摆动板44往复摆动的槽。
24.如图1-3所示,作为本发明的一种优选实施例,所述破冰齿32设于转动板31的侧壁
上,所述转动板31的中心轴末端固定连接有齿轮45,所述齿轮45与啮合齿46啮合连接,所述齿轮45与连接座42转动连接。
25.在本发明实施例中,优选的,通过遥控器控制电机一43工作,电机一43带动转柄53转动,转柄53带动滑动头48转动,滑动头48通过与滑槽49滑动连接的方式带动摆动板44往复摆动,摆动板44带动旋转板47往复摆动,旋转板47通过啮合齿46与齿轮45啮合连接的方式带动齿轮45间歇旋转,齿轮45带动转动板31间歇旋转,转动板31带动破冰齿32间歇旋转,破冰齿32通过间歇旋转的方式使得大部分冰从电缆上脱落,摆动板44通过固定杆52带动敲击头02往复摆动,使得敲击头02往复敲打电缆,敲击头02将余下的冰敲落。
26.如图1和图2所示,作为本发明的一种优选实施例,所述连接座42固定设于箱体41内,所述箱体41通过固定座51与壳体01固定连接。
27.在本发明实施例中,优选的,固定座51通过螺栓与壳体01的底部固定连接。
28.如图1所示,作为本发明的一种优选实施例,所述除冰机构设有两个,两个除冰机构分别设于电缆的两侧。
29.在本发明实施例中,优选的,两个除冰机构交叉设置,一个除冰机构设于壳体01前侧,另一侧除冰机构设于壳体01的后侧,位于后侧的除冰机构用于辅助前侧的除冰机构对电缆进行除冰。
30.如图4所示,作为本发明的一种优选实施例,所述前行结构包括电机二15,所述电机二15的输出端设有皮带轮一14,所述皮带轮一14通过传动皮带13与皮带轮二17连接,所述皮带轮二17的中心轴末端设有主动轮12,所述主动轮12与电缆的下表面传动连接,所述主动轮12活动安装于壳体01上,所述壳体01内活动安装有从动轮11,所述从动轮11与电缆的上表面传动连接。
31.在本发明实施例中,优选的,从动轮11和主动轮12均设有两个。通过遥控器控制电机二15工作,电机二15带动皮带轮一14转动,皮带轮一14通过传动皮带13带动皮带轮二17转动,皮带轮二17带动主动轮12转动,主动轮12通过与从动轮11配合达到带动设备前行的效果,从而利用除冰机构将电缆上的冰除去,因此能够代替人工除冰,提高了安全性,并且不需要根据天气和环境因素来选择性工作,省时省力。
32.如图4所示,作为本发明的一种优选实施例,所述壳体01内固定连接有固定台16,且所述壳体01的底部设有落冰槽18。
33.在本发明实施例中,机器人行走时,残留的碎冰会由于从动轮11和主动轮12的活动还脱落,脱落的碎冰从固定台16滑到壳体01的底部,随后从落冰槽18导出。
34.本发明的工作原理是:该电力输送电缆除冰工业机器人,通过遥控器控制电机一43工作,电机一43带动转柄53转动,转柄53带动滑动头48转动,滑动头48通过与滑槽49滑动连接的方式带动摆动板44往复摆动,摆动板44带动旋转板47往复摆动,旋转板47通过啮合齿46与齿轮45啮合连接的方式带动转动板31间歇旋转,转动板31带动破冰齿32间歇旋转,破冰齿32使得大部分冰从电缆上脱落,摆动板44通过固定杆52带动敲击头02往复摆动,使得敲击头02往复敲打电缆,敲击头02将余下的冰敲落;电机二15带动皮带轮一14转动,皮带轮一14通过传动皮带13带动皮带轮二17转动,皮带轮二17带动主动轮12转动,主动轮12通过与从动轮11配合达到带动设备前行的效果。
35.以上仅是本发明的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些均不会影响本发明实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1