一种风光互补型水面太阳能面板的清洁方法与流程
1.本发明属于太阳能面板清洁方法技术领域,具体涉及一种风光互补型水面太阳能面板的清洁方法。
背景技术:
2.太阳能发电作为我国大力发展的新能源产业之一,其一直被业界关注。随着科技的不断发展,太阳能发电的效率不断提高。其正在慢慢被分布在全国各地,逐渐的去替代其它传统的发电方式。由于太阳能发电面板是需要太阳光作为输入能源,将其转化为电能。这种特殊的要求使得太阳能面板必须放置在露天的场合,太阳能面板会直接与外界环境相接触,这就会使太阳能面板的发电受到各种干扰。干扰中最常见的就是太阳能面板表面被风尘、积雪遮盖,使太阳光照射在太阳能面板上时被遮挡物遮挡反射,导致太阳能面板接收到太阳光减少,最终使太阳能面板发电量大大降低。
3.由于我国海拔高度是西高东低,西部地区所受的太阳光照时长较长且光照强度高,因此我国太阳能面板大多分布在西北地区。我国西北地区风沙较多环境相对恶劣,太阳能面板上时长会被风沙遮挡。虽然工作人员会定期为太阳能面板进行清洁,但是清洁的周期一般较长。特别地,那些被安置在水面上的太阳能面板受到水上作业较难,以及太阳能面板排布较为密集导致工作人员难以进入内部等因素的影响,很难对太阳能面板进行清洁。
4.介于以上原因,本发明提出了一种风光互补型水面太阳能面板的清洁方法,该方法能代替人工进入到分布在水面上的排列密集的太阳能面板内部,清除人工不能清除到的遮挡物。且该方法能横纵两方向清洁太阳能面板,且会根据太阳能面板的倾斜角度、高低调整清洁位置,在工作时能完全的清除遮挡物,使太阳能面板恢复高效的发电效率。
技术实现要素:
5.本发明的目的在于提供一种清洁效率高、清洁效果好的风光互补型水面太阳能面板的清洁方法。
6.基于上述目的,本发明采用如下技术方案:一种风光互补型水面太阳能面板的清洁方法,包括以下步骤:步骤1,设置清洁装置在需要清洁的太阳能面板上的初始位置,获取清洁装置与需要清洁的太阳能面板的相对位置信息;步骤2,控制清洁装置接触到需要清洁的太阳能面板上;步骤3,控制清洁装置紧贴到需要清洁的太阳能面板上;步骤4,控制清洁装置清洁整块太阳能面板;步骤5,控制清洁装置移动到下一块太阳能面板,重复步骤1-5。
7.进一步的,清洁装置包括水平设置的伸缩杆,伸缩杆一端连接有旋转电机,另一端连接有竖直的可伸缩支架;旋转电机与太阳能面板连接;可伸缩支架上设置有伸缩电机,可伸缩支架底端连接有清洁机构,清洁机构包括与可伸缩支架底端连接的水平设置的大圆
盘,大圆盘底端连接有调整机构;调整机构底端连接有清洁底盘;伸缩杆上设置有位置传感器、距离传感器和角度传感器;清洁底盘上设置有压力传感器;位置传感器、距离传感器、角度传感器和压力传感器连接有pc控制器。
8.进一步的,在步骤1中,获取相对位置信息的方法为:通过位置传感器、距离传感器和角度传感器采集清洁装置相对于太阳能面板的距离、太阳能面板的高度以及太阳能面板的倾斜度,并将信息传输给pc控制器,pc控制器计算出清洁机构相对于初始位置的水平距离和竖直距离。
9.进一步的,在步骤2中,控制清洁装置的方法为:pc控制器发出控制信号给旋转电机,控制旋转电机带动伸缩杆和清洁机构转动,然后pc控制器发出控制信号给伸缩杆,控制伸缩杆带动清洁机构移动,直到清洁机构处于初始位置的正上方;接着,pc控制器发出控制信号给伸缩电机,控制伸缩电机带动可伸缩支架和清洁机构上下移动,直到清洁底盘触碰到太阳能面板。
10.进一步的,调整机构包括在大圆盘底端均布的四个细直杆,每个细直杆均与大圆盘转动连接;每个细直杆底端均转动连接有底部套筒,每个细直杆上均固连有摇动电机,每个摇动电机均连接有与其垂直的摇臂,每个摇臂远离摇动电机的一端均转动连接有上部套筒;与同一细直杆连接的底部套筒和上部套筒均连接有一个粗直杆,每个粗直杆均与上部套筒固连,每个粗直杆均与底部套筒滑动连接;四个粗直杆底端与清洁底盘固连。
11.进一步的,在步骤3中,控制清洁装置的方法为:压力传感器检测清洁底盘与太阳能面板之间的压力,并将压力信息传输给pc控制器,pc控制器传递控制信号给摇动电机,控制摇动电机转动,摇动电机带动清洁底盘倾斜,直至清洁底盘与太阳能面板之间的压力处于设定的最大值与最小值之间。
12.进一步的,在步骤4中,控制清洁装置清洁太阳能面板的方法为:位置传感器和距离传感器测量清洁机构与需要清洁的太阳能面板边界之间距离,并传输给pc控制器,pc控制器发出控制信号给旋转电机,控制旋转电机带动清洁机构往复摆动,清洁太阳能面板;清洁完毕后,清洁机构回到初始位置,pc控制器传出控制信号给伸缩杆,控制伸缩杆带动清洁机构水平移动一个清洁底盘的距离,重复对旋转电机和伸缩杆发出控制信号,直至清洁完整个太阳能面板。
13.进一步的,旋转电机连接有承载船,承载船上连接有机械爪,机械爪与太阳能面板活动连接;承载船和机械爪均与pc控制器连接。
14.进一步的,在步骤5中,控制清洁装置移动到下一块太阳能面板的方法为:pc控制器发出控制信号给伸缩电机,伸缩电机带动可伸缩支架缩短,可伸缩支架带动清洁机构上移脱离清洁好的太阳能面板;然后位置传感器和距离传感器检测清洁机构与相邻太阳能面板的距离,并传输给pc控制器,pc控制器控制承载船移动到下一个相邻的太阳能面板,并控制机械爪与下一个太阳能面板连接。
15.与现有技术相比,本发明具有以下有益效果:1、本发明能够使清洁机构在水面上自主作业,方便对太阳能面板清洁,并可代替人工来清洁太阳能面板,提升效率的同时也节省了人力。
16.2、本发明通过传感器能够自主的检测自身清洁底盘与太阳能面板的相对位置,并且能根据太阳能面板的角度自主的调节清洁机构底部清洁底盘的清洁角度,使清洁底盘倾
斜的角度与太阳能面板倾斜的角度一致。并能调节清洁底盘与太阳能面板之间的压力,使清洁底盘能精密的贴合在太阳能面板上,并对太阳能面板施加一定的压力,使清洁机构能够完全清洁掉太阳能面板的遮挡物,大大提高了清洁效率。
17.3、本发明的清洁机构采用四个细直杆与四个粗直杆连接通过四个细直杆上的摆臂转动带动四个粗直杆能够保证角度调节的精确度,使清洁底盘能够与太阳能板紧密贴合;并且使用四个细直杆连接四个粗直杆能够保持连接的稳定,进而保证清洁底盘清洁时能够与太阳能板保持稳定贴合。
附图说明
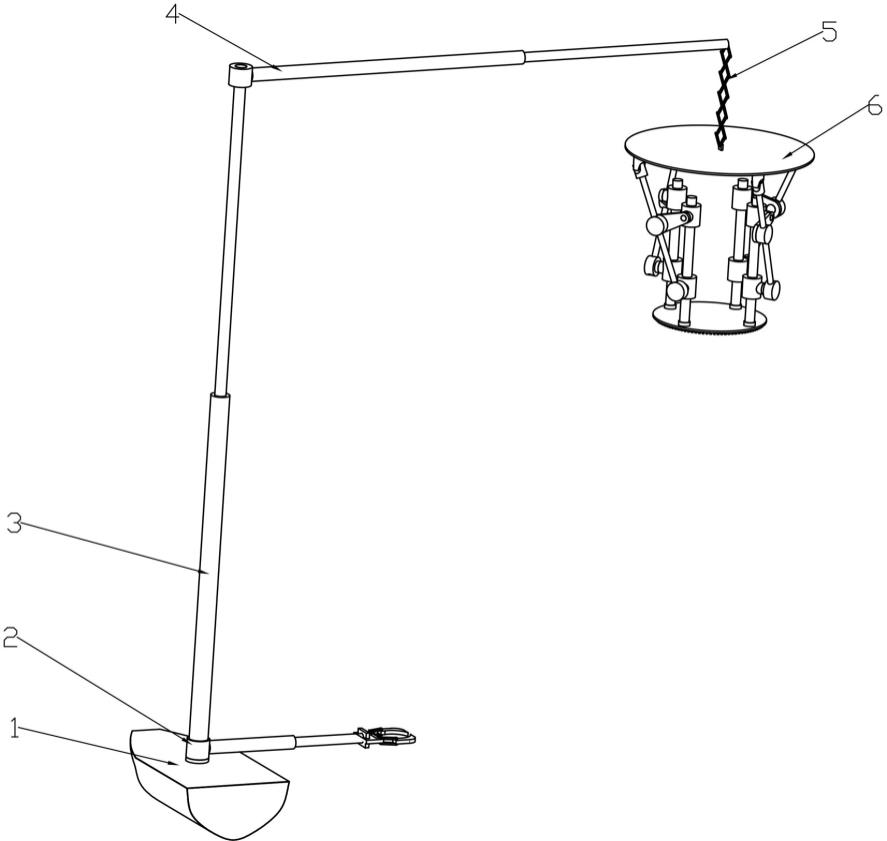
18.图1为本发明实施例1的清洁装置示意图;图2为本发明实施例1的清洁机构示意图;图3为本发明实施例1的清洁装置与承载船连接的示意图;图4为本发明实施例1的控制清洁装置的示意图;图5为本发明实施例1的控制摇臂电机的示意图。
19.图中:承载船1、机械爪2、支撑杆3、伸缩杆4、可伸缩支架5、清洁机构6、旋转电机7、伸缩电机8、连接头9、摇动电机10、大圆盘11、万向节12、上部套筒13、细直杆14、摇臂15、粗直杆16、底部套筒17、清洁底盘18。
具体实施方式
20.实施例1一种风光互补型水面太阳能面板的清洁方法,利用了如下清洁装置,如图1-3所示,清洁装置包括水平设置的伸缩杆4,伸缩杆4一端连接有旋转电机7,另一端连接有竖直的可伸缩支架5;旋转电机7与太阳能面板连接;可伸缩支架5顶端设置有伸缩电机8,可伸缩支架5底端固连有连接头9,连接头9底端固连有水平的大圆盘11,大圆盘11底端均布有四个细直杆14,每个细直杆14均与大圆盘11转动连接,每个细直杆14顶端均通过万向节12与大圆盘11连接;每个细直杆14底端均转动连接有底部套筒17,每个细直杆14上均固连有摇动电机10,每个摇动电机10均连接有与其垂直的摇臂15,每个摇臂15远离摇动电机10的一端均转动连接有上部套筒13;与同一细直杆14连接的底部套筒17和上部套筒13均连接有一个粗直杆16,每个粗直杆16均与上部套筒13固连,每个粗直杆16均与底部套筒17滑动连接;与同一粗直杆16连接的上部套筒13和底部套筒17均与此粗直杆16同轴,四个粗直杆16底端连接有与粗直杆16垂直的清洁底盘18。伸缩杆4上设置有多个位置传感器、距离传感器和角度传感器;清洁底盘18上设置有压力传感器,距离传感器为红外测距仪;位置传感器、距离传感器、角度传感器和压力传感器连接有pc控制器。这些传感器时刻工作,随时获取整个装置相对于太阳能面板的距离、太阳能面板高度以及太阳能面板的倾斜度。
21.旋转电机7连接有承载船1,承载船1上固连有竖直的支撑杆3,支撑杆3可被控制伸缩,支撑杆3顶端与旋转电机7固连,旋转电机7竖直设置。承载船1上还连接有机械爪2,机械爪2与太阳能面板活动连接;承载船1和机械爪2均与pc控制器连接。
22.一种风光互补型水面太阳能面板的清洁方法,如图1所示,包括以下步骤:步骤1,设置清洁装置在需要清洁的太阳能面板上的初始位置r,获取相对位置信
息的方法为:通过位置传感器、距离传感器和角度传感器采集清洁装置相对于太阳能面板的距离、太阳能面板距离水面的高度以及太阳能面板的倾斜度,并将信息传输给pc控制器,pc控制器将这些距离、位置信息输入到cpu中进行判断、并计算出清洁机构6相对于初始位置r的水平距离和竖直距离。
23.步骤2,pc控制器接受了相应的传感器传输的数据,并做出相应的反馈控制各个执行器进行工作,最终使得清洁机构6的清洁底盘18接触到需要清洁的太阳能面板上:pc控制器根据自身计算出的清洁机构6相对于太阳能面板的位置发出控制量为u1的控制信号给旋转电机7,控制旋转电机7带动伸缩杆4和清洁机构6转动,直至清洁机构6在垂直与自身的中心线上与需要清洁的太阳能面板所需清洁的初始位置r平行,并得到清洁机构6被操控的量为q1。然后pc控制器发出控制量为u2的控制信号给伸缩杆4,控制伸缩杆4伸缩并带动清洁机构6移动,直到清洁机构6处于需要清洁的太阳能面板所需清洁的初始位置r的正上方为止,并得到清洁机构6被操控的量为q2。接着,pc控制器发出控制量为u3的控制信号给伸缩电机8,控制伸缩电机8带动可伸缩支架5和清洁机构6上下移动,直到清洁底盘18触碰到需要清洁的太阳能面板,此处得到的清洁机构6被操控的量为q3。三个控制量分别为u1、u2和u3的控制信号共同作用使得清洁机构6受到的总的操控量为q1+q2+q3,最终清洁机构6刚好触碰到清洁太阳能面板。
24.步骤3,控制清洁装置紧贴到需要清洁的太阳能面板上:清洁机构6的清洁底盘18刚接触到太阳能面板上后,此时太阳能面板和清洁机构6的相对位置为零。压力传感器开始工作检测清洁底盘18与太阳能面板之间的压力p,最后传输给pc控制器;pc控制器开始处理该信息并判断该压力是否大于等于给定的压力值p1;可选地,当由压力传感器传来得到压力小于设定的初值压力p1时,pc控制器传递控制量为u4的控制信号给摇动电机10,控制摇动电机10转动。此时,摇动电机10的控制如图2所示,控制量为u4 的总控制信号按照不同的控制量u41、u42、u43和u44分为四个控制信号同时作用到四个摇动电机101、2、3和4上。接收到控制信号的四个摇动电机10开始协调工作。可选地,当太阳能面板向清洁机构6的左下方倾斜角度为o时,处在太阳能面板的倾斜的最低端的一侧摇动电机10向下摆动,驱使粗直杆16杆向下移动,移动量为u41。同时,处在中间两侧和另一侧摇动电机10开始带动着各自的粗直杆16向上运动,总移动量为u42+u43+u44,四个摇动电机10驱使粗直杆16运动,使得清洁底盘18的倾斜角度与太阳能面板相同为o。同时,保证各摇动电机10驱动粗直杆16的运动,使得清洁机构6的清洁底盘18与太阳能面板之间的压力p刚好处在(p1,p2)之间。清洁底盘18与太阳能面板之间存在一定的压力能够保证清洁装置在清洁太阳能面板上的灰尘时,清洁的干净有效。
25.步骤4,控制清洁装置清洁整块太阳能面板:当清洁机构6的清洁底盘18与太阳能面板存在一定的压力后,位置传感器和距离传感器测量清洁机构6与需要清洁的太阳能面板边界之间距离,并传输给pc控制器,pc控制器发出控制量为u1的控制信号给旋转电机7,控制旋转电机7带动清洁机构6往复摆动,清洁太阳能面板;当清洁结构摆动三次彻底清洁了此处的太阳能面板后回来初始位置r处,pc控制器传出控制量为u2的控制信号给伸缩杆4,控制伸缩杆4带动清洁机构6水平移动一个清洁底盘18的距离,移动完成后,重复对旋转电机7和伸缩杆4发出控制量为u1、u2的控制信号,直至清洁完整个太阳能面板。
26.步骤5,控制清洁装置移动到下一块太阳能面板:清洁结构清洁完该处的一整块太
阳能面板后,继续向下一处未清洁的太阳能面板处移动;pc控制器发出控制信号给伸缩电机8,伸缩电机8带动可伸缩支架5缩短,可伸缩支架5带动清洁机构6上移脱离清洁好的太阳能面板;然后位置传感器和距离传感器检测清洁机构6与相邻太阳能面板的距离,并传输给pc控制器,pc控制器控制承载船1移动到下一个相邻的太阳能面板,并控制机械爪2与下一个太阳能面板连接。重复步骤1-5直至完全清理完所需要清理的太阳能面板。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1