一种铁路接触线悬挂异物清除装置
1.本发明属于电气化铁路接触网接触线与受电弓可靠接触工作技术领域,是涉及一种铁路接触线悬挂异物清除装置。
背景技术:
2.电气化铁路机车供电是在铁轨正上方架设一条“之”字走向的接触网,通过接触网接触线与机车顶部的受电弓滑动接触,为电力牵引机车提供源源不断的电能;接触网是电力机车运行的唯一供电设施,因此接触网的安全可靠直接影响铁路行车安全。
3.接触网接触线异物是威胁列车安全运营的重要因素之一。
4.因各种原因导致的异物侵入接触网的情况时有发生,尤其是铁路两侧的废弃塑料袋、垃圾袋、农田地膜,以及风筝、气球等经常被风吹至接触网上,接触网接触线因悬挂这些绝缘异物,造成受电弓断电或离线拉弧,严重时一旦异物缠绕到受电弓上,易造成受电弓损坏,甚至造成接触网拉垮,进而引发塌网,造成严重事故影响行车安全。
5.目前对接触网异物的监测,除了依靠列车司机监测外,各铁路局集团公司供电段一般采取2种人工监测方式:一种是安排巡线人员定期巡视接触网;另一种是安排巡线人员添乘机车定期巡视接触网。
6.这2种方式都比较传统,优点是能精准的判断异物的种类以及对列车运行的影响;缺点是效率低,不能连续24h监测接触网,且人工成本较高、劳动强度较大。
7.目前对于接触网异物的清除还只是依靠人工清除,发现后不能立即解决,需要列车停运,对铁路正常运输会造成很大影响,如果机车能自动识别接触网接触线上的异物,并能够在不停车的情况下及时清除接触线异物,对铁路提速增效具有实际意义。
技术实现要素:
8.有鉴于此,本发明提供一种铁路接触线悬挂异物清除装置,可以在机车运行过程中及时发现接触网悬挂异物并启动清除装置进行快速清除,不需机车停运,提高了效率,减少了危害的发生,同时省时省力。
9.为了实现上述目的,本发明采用如下技术方案:一种铁路接触线悬挂异物清除装置,包括升降支架、带轮小车、箱体、粉碎机构、切割圆锯片、电机、传动机构、导向杆、滚轮式导向皮带、可伸缩负压收集软管、三维电场传感器、近距离观测摄像头。所述升降支架固定在机车顶部,为类似受电弓型可升降折叠支架,在所述支架的顶端设置有供带轮小车运动的“工”字形轨道,轨道上平面两侧设置格挡使小车运行更稳固;所述带轮小车设置有四个车轮,轮轴处连接“l”形杆将车轮与小车固定在一起;所述箱体安装在带轮小车上,箱体前部开口,在开口处设置有异物切割圆锯片和粉碎机构;所述箱体后端设置有孔,并与可伸缩负压收集软管对接,把粉碎后的异物送入车内的负压收集仓;在所述箱体上部设置有三维电场传感器和近距离观测摄像头;在所述箱体两侧对称设置2个电机,一个电机负责牵引小车运动,另一个电机负责切割圆锯片、粉碎机构、滚轮式导向皮带运转;所述三维电场传感
器为2个,并列设置在小车后部箱体的上部,与箱体上平面中线对称;所述切割圆锯片为2个,并列设置在小车前部箱体的上部,与箱体上平面中线对称,锯齿部分贴合,同步对向旋转;所述粉碎机构有2个转轴同步对向旋转,设置在切割圆锯片的下方,与切割圆锯片同轴,所述粉碎机构两个转轴上分别有序固定一组粉碎刀片,所述两转轴上粉碎刀片转动时相互贴合;所述导向杆有2个成90
°
,设置在粉碎机构转轴的下端,v字型伸出,与水平面斜向下成45
°
角,在所述导向杆v字型内侧面设置有一排斜向粉碎机构的软皮倒刺,用于引导异物进入粉碎机构;所述滚轮式导向皮带有2个,设置在粉碎机构两侧斜向外45
°
,所述导向皮带由长方体框架固定,两侧放有转轴,所述两转轴上装有滚动皮带,所述滚动皮带外表面上均匀分布着斜向粉碎机构的软皮倒刺,用于引导异物进入粉碎机构。
10.采用所述的铁路接触线悬挂异物清除装置的控制方法流程,包括如下步骤:步骤一:列车车头上的远距离摄像头和近距离摄像头一直处于监控和图像识别的状态,当检测到前方接触线上有异物时,发出信号,触发异物清除装置启动开始工作。步骤二:支架升起,同时三维电场传感器工作,完成装置定位流程,当升起完成到指定位置后,启动切割圆锯片、粉碎机构和负压收集装置,开启小车上方的摄像头,对圆锯片上方清除障碍物的地方进行监控和近程的图像识别,同时继续应用三维电场传感器进行小车寻迹流程。步骤三:当小车上的近距离摄像头识别已完成异物清除,同时列车上的近距离摄像头和远距离摄像头也检测不到前方接触线上有异物后,则清除装置结束工作;首先关闭切割圆锯片、粉碎机构和收集负压装置,关闭小车上方的摄像头,关闭小车寻迹系统,收起带有小车的支架;列车头上的近距离摄像头和远距离摄像头继续一直对接触线进行监控和图像识别,不断重复此流程。
11.步骤二中的装置定位流程包括如下流程:(1)小车跟踪接触线寻迹流程:装置启动后,二个三维电场传感器对接触线所产生的电场进行检测,当小车位置处于接触线正下方时,二个维电场传感器测得场强相同,如果小车位置偏离了接触线正下方位置,二个三维电场传感器测得的场强数值会不同,如果左侧传感器测得的场强大于右侧传感器测得的场强,则控制小车向右移动,如果左侧传感器测得的场强小于右侧传感器测得的场强,则控制小车向左移动;直至二个三维电场传感器测得的场强数值相同,不断循环这一流程。(2)装置上下位置定位流程:首先事先调整好异物清除装置与接触线的相对位置,测得小车的上下位置距离接触线正合适时,二个三维电场传感器测得的场强数值作为标准设定值;当小车跟随上接触线后即二个三维电场传感器测得的场强相同时,此时判断该场强的数值是否等于上述的设定标准值,若相等则装置不再上升即确定好了上下位置关系,若小于该值则需要继续上升。
12.采用所述的铁路接触线悬挂异物清除装置的快速启动方法,包括以下内容:在控制稳定性的基础上,同时考虑快速性目标,从而引入速度因子v(k);定义速度因子v(k)是关于yr(k+τ+1)和y(k+τ)的函数,即:v(k)=f[yr(k+τ+1),y(k+τ)],v1≤v(k)≤v2ꢀꢀꢀ
(1)其中yr(k+τ+1)是系统k+τ+1时刻的理想输出值,也即系统的目标输出;y(k+τ)是系统k+τ时刻的实际输出值;f(
·
)是一个适当的关于yr(k+τ+1)与y(k+τ)的函数;v2,v1是速
度因子上下限;函数f(
·
)的选取应当满足:当目标输出yr和实际输出y存在较大偏差时,速度因子在控制律中占较大权重,使实际输出快速变化,减小误差;当目标输出yr和实际输出y偏差较小时,速度因子v(k)在控制律中影响变小,主要保证控制稳定性。
[0013]
本发明的有益效果:本发明与现有技术相比,能够运用相应的结构配合和控制方案配合进行接触线异物的快速清除,保障不停车的情况下,直接检测识别并清除接触线的缠绕物,能够保障弓网系统的安全可靠运行以及减少不必要的经济损失。
附图说明
[0014]
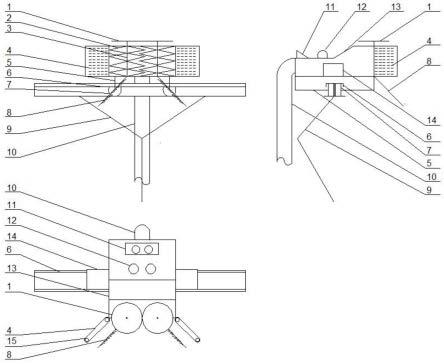
图1为本发明的一种铁路接触线悬挂异物清除装置的主视图、左视图与俯视图简图;
[0015]
图2为本发明的一种铁路接触线悬挂异物清除装置的控制方法流程图;
[0016]
图3为小车跟踪接触线寻迹流程图;
[0017]
图4为装置上下位置定位流程图;
[0018]
图1中,1-切割圆锯片,2-粉碎刀片,3-转轴,4-滚轮式导向皮带,5
‑“
l”形杆,6-带格挡的类“工”字形轨道,7-车轮,8-导向杆,9-升降支架,10-可伸缩软管,11-摄像头,12-三维电场传感器,13-箱体,14-电机,15-滚轮式导向皮带的转轴。
具体实施方式
[0019]
下面结合附图和具体实施例对本发明做进一步的详细说明。
[0020]
如图1所示,一种铁路接触线悬挂异物清除装置,包括受电弓型可升降支架9、带轮小车7、箱体13、可伸缩软管10、切割圆锯片1、粉碎刀片2、粉碎转轴3、滚轮式导向皮带4、导向杆8、三维电场传感器12、电机14以及摄像头11组成;在所述受电弓型升降支架9上放置小车,所述支架上的供带轮小车运动的轨道为上平面两侧带格挡的类“工”字形轨道6,小车车轮7在轨道内,同时从轮轴处连接一个“l”形杆5将车轮7与小车固定在一起;所述小车上为箱体13,所述箱体13上方固定一个近距离观测摄像头11,所述摄像头11前面安装有一对以小车上平面中线对称的三维电场传感器12,所述箱体13后部连接一个可伸缩软管10与车内负压收集装置连通;所述箱体13的两侧对称安装两个电机14,一个电机14负责带动小车车轮7运动,另一个电机14负责带动小车上切割圆锯片、粉碎机构、滚轮式导向皮带的正常运转;所述箱体13前部连接两个转轴3;所述转轴3上有序固定一组粉碎刀片2,所述两转轴3上粉碎刀片2转动时相互贴合对向旋转构成粉碎机构;所述粉碎机构中的两转轴3上部分别连接用于切割的圆锯片1,所述两个切割锯片1锯齿贴合对向旋转;所述粉碎机构转轴3的下边各连接一个与水平面斜向下成45
°
角的v型导向杆8,所述v型导向杆8为两个成90
°
长杆组成,所述长杆内侧面有一排斜向粉碎机构的软皮倒刺;所述粉碎机构两侧斜向45
°
各装有导向皮带4,所述导向皮带4由长方体框架固定,两侧连接有转轴15,所述两转轴15上装有滚动皮带,所述滚动皮带外表面上均匀分布着斜向粉碎装置的软皮倒刺;所述导向杆和导向皮带把异物引导到粉碎机构处。
[0021]
采用所述的铁路接触线悬挂异物清除装置的控制方法流程,包括如下步骤:步骤一:列车车头上的远距离摄像头和近距离摄像头一直处于监控和图像识别的状态,当检测到前方接触线上有异物时,发出信号,自动启动异物清除装置开始工作;
步骤二:支架升起,同时三维电场传感器工作,完成装置定位流程,当升起完成到指定位置后,启动切割圆锯片、粉碎机构和负压收集装置,开启小车上方的摄像头,对圆锯片上方清除障碍物的地方进行监控和近程的图像识别,同时继续应用三维电场传感器定位装置进行小车寻迹流程;步骤三:当小车上的近距离摄像头识别已完成异物清除,同时列车上的近距离摄像头和远距离摄像头也检测不到异物后,则清除装置结束工作;关闭切割圆锯片、粉碎机构和负压收集装置,关闭小车上方的摄像头,关闭小车寻迹系统,收起带有小车的支架;列车头上的近距离摄像头和远距离摄像头继续一直对接触线进行监控和图像识别,不断重复此流程。图2所示为控制方法流程图。
[0022]
步骤二中的装置定位流程包括如下流程:(1)小车跟踪接触线寻迹流程:装置启动后,二个三维电场传感器对接触线所产生的电场进行检测,当小车位置处于接触线正下方时,二个维电场传感器测得场强相同,如果小车位置偏离了接触线正下方位置,二个三维电场传感器测得的场强数值会不同,如果左侧传感器测得的场强大于右侧传感器测得的场强,则控制小车向右移动,如果左侧传感器测得的场强小于右侧传感器测得的场强,则控制小车向左移动;直至二个三维电场传感器测得的场强数值相同,不断循环这一流程。图3所示为小车跟踪接触线寻迹流程图。(2)装置上下位置定位流程:首先事先调整好异物清除装置与接触线的相对位置,测得小车的上下位置距离接触线正合适时,二个三维电场传感器测得的场强数值作为标准设定值;当小车跟随上接触线后即二个三维电场传感器测得的场强相同时,此时判断该场强的数值是否等于上述的设定标准值,若相等则装置不再上升即确定好了上下位置关系,若小于该值则需要继续上升。图4所示为装置上下位置定位流程图。
[0023]
采用所述的铁路接触线悬挂异物清除装置的快速启动方法,包括以下内容:在控制稳定性的基础上,同时考虑快速性目标,从而引入速度因子v(k);定义速度因子v(k)是关于yr(k+τ+1)和y(k+τ)的函数,即:v(k)=f[yr(k+τ+1),y(k+τ)],v1≤v(k)≤v2ꢀꢀꢀ
(2)其中yr(k+τ+1)是系统k+τ+1时刻的理想输出值,也即系统的目标输出;y(k+τ)是系统k+τ时刻的实际输出值;f(
·
)是一个适当的关于yr(k+τ+1)与y(k+τ)的函数;v2,v1是速度因子上下限;函数f(
·
)的选取应当满足:当目标输出yr和实际输出y存在较大偏差时,速度因子需在控制律中占较大权重,使实际输出快速变化,减小误差;当目标输出yr和实际输出y偏差较小时,速度因子v(k)在控制律中影响变小,主要保证控制稳定性。
[0024]
实施例中的方案并非用以限制本发明的专利保护范围,凡未脱离本发明所为的等效实施或变更,均包含于本案的专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1