一种可实时跟踪的双向无线充电系统互感识别方法与流程
本发明涉及互感识别,尤其涉及一种可实时跟踪的双向无线充电系统互感识别方法。
背景技术:
1、磁感应无线充电技术(ipt)广泛应用于无人机、消费者电子、医疗植入设备等多个领域,电动汽车无线充电技术以其低成本、可靠性、安全性和便携性等优点,为电动汽车充电提供了有效的解决方案。其中,双向磁感应无线电能传输系统(bidirectionalinductive power transfer,bd-ipt)可以实现在vehicle to grid(v2g)和grid tovehicle(g2v)两种模式间自由切换,并具有调配电能、削峰填谷等功能,可以利用电动汽车的动力电池作为良好的分布式电源,实现车网之间的能量互动。
2、值得关注的是,无线充电系统的传输效率和输出功率受到耦合线圈互感参数变化影响,而不同电动汽车的底盘高度和对准程度会导致互感参数变化。并且在电动汽车移动的动态无线充电过程中,互感参数受路面颠簸,方向偏移等影响持续变化,这都将严重影响系统性能。因此,针对bd-ipt系统,耦合线圈互感参数的准确实时识别是保持系统恒定、高效率功率输出的前提条件。
3、为了使功率传输最大化,bd-ipt系统往往需要增加补偿电路。ss补偿电路虽具有结构简单,传输功率大的优点,但限制于功率传输模型的特性,互感的减小会导致电流的异常增大,这在电动汽车充电过程中是极其不安全的;lcc补偿电路具有传输功率高、抗偏移能力强等优势,有效地解决了上述问题。并且由于lcc拓扑的复杂性,针对lcc拓扑的估计方法较少且更困难,因此本发明采用两侧对称的lcc拓扑作为研究对象。
4、目前,针对lcc拓扑的互感估计方法主要存在两方面的问题:(1)只在充电开始阶段对互感进行估计,无法对互感参数进行实时跟踪。(2)估计方法受电路参数影响较大,无法保证准确度。
技术实现思路
1、本发明的目的在于提供一种可实时跟踪的双向无线充电系统互感识别方法,解决背景技术中存在的技术问题。采样谐振电容和补偿电容的实时电压进行分解,获取可以反映互感参数值的线圈感应电压,对线圈互感参数进行实时估计。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种可实时跟踪的双向无线充电系统互感识别方法,所述方法包括如下步骤:
4、步骤1:将双向无线充电系统电路的原边电路的固有参数通过通信的方式发送到副边电路;
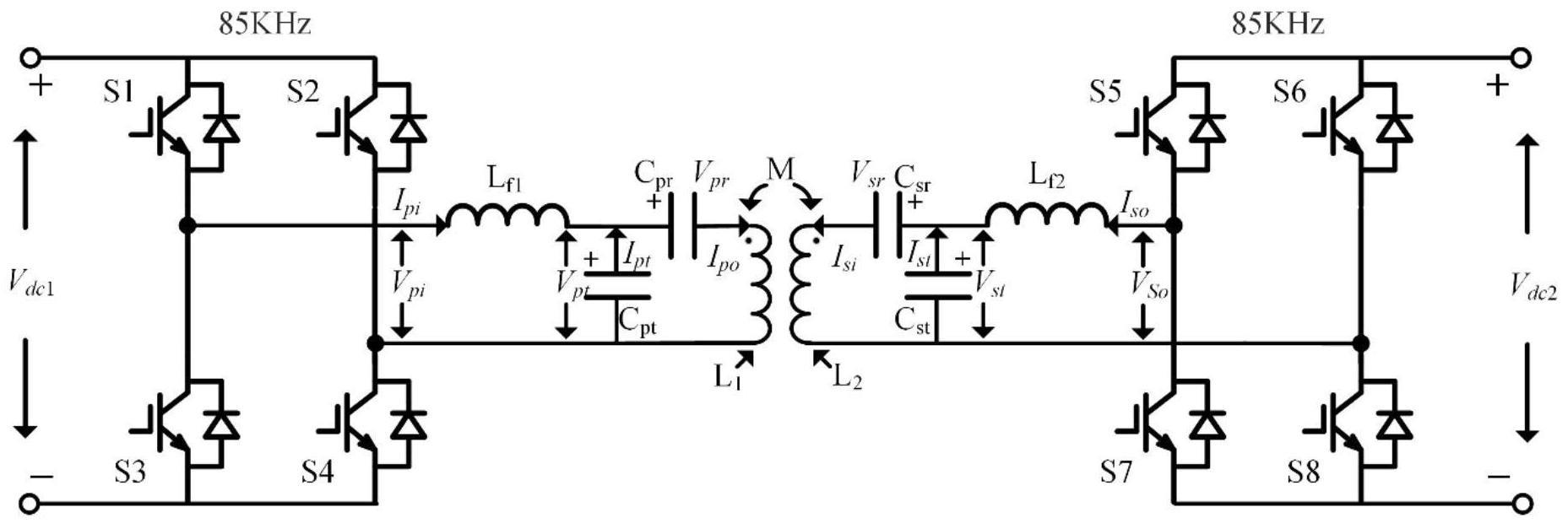
5、步骤2:原边电路计算出方波电压的基波分量vpi,计算副边电路计算出方波电压的基波分量,对副边谐振电容电压ust和副边补偿电容电压usr进行电压采样和滤波,将副边谐振电容电压ust解耦分解出原边电流通过耦合电感感应得到的电压usi,并计算出其基波有效值vsi;
6、步骤3:通过原边电路的等效推导,求出识别互感m大小,实现对双向无线充电系统的互感信息的实时跟踪。
7、进一步地,步骤1的具体过程为:把双向无线充电系统的一侧的电路设置为原边电路,另一侧的电路设置为副边电路,原边电路为车载充电系统,副边电路为地面充电系统,由于车载充电系统和地面充电系统存在电气隔离,只可控制地面充电系统,直流电压幅值,电感电容值为固有参数,可通过慢速通信发送到副边电路,实现信息共享,但无法获取原边电路电压电流的物理量实时信息,通过现有实时信息识别互感值;
8、车载充电系统的直流源为vdc1,地面充电系统的直流源为vdc2,经两侧全控全桥变换器得到方波电压,车载充电系统和地面充电系统的方波电压的基波分量为vpi和vso如下表示:
9、
10、
11、其中,vdc1和vdc2为两侧直流电压幅值,α1和α2为两侧移相角;
12、车载充电系统和地面充电系统两侧电压源经lcc补偿电路和耦合电感传递能量,其中,原边电路的lcc电路由谐振电感lf1、谐振电容cpt、补偿电容cpr和线圈原边自感l1组成,副边电路的lcc电路由谐振电感lf2、谐振电容cst、补偿电容csr和线圈副边自感l2组成,耦合电感的互感为m;
13、补偿电路需运行在谐振点85khz处,其关系为:
14、
15、
16、其中,f0=85khz,ω0=2πf0
17、耦合电感副边感应电压vsi包含互感参数信息,其表达式如下,其中ipo为通过耦合电感原边的线圈电流:
18、vsi=jωmipo (5)
19、上式中jω为相角,
20、副边谐振电容两端电压vst由补偿电容电压vsr,线圈副边自感电压vl2和副边感应电压vsi构成,其中vsi包含原边电压信息,而vsr和vl2包含副边电压信息,实际系统中无法将上述电压分别测量出来获取互感信息,所以需要将vst进行电压解耦,分离出vsi:
21、vst=vsr+vl2+vsi (6)
22、两次方波电压基波分量vpi和vso的相角差决定功率流的传递方向,相角差为正时,功率流正向传递,反之,功率流反向传递,当相角差保持在±90°时,实现零无功功率的能量传递。
23、进一步地,步骤2的具体过程为:
24、原边电路采用戴维宁等效原理推导ipo和vpi的关系,将未知量用已知量代替,考虑杂散电阻的影响,将双向无线充电系统电路变换为带有杂散电阻的等效电路,对副边谐振电容电压ust和副边补偿电容电压usr进行高速采样,其中usi、usr和ust均为类正弦波,但存在部分谐波会影响最终的识别准确度,所以需要设计带通滤波器滤除高频谐波成分和直流偏置成分以保证usi、usr和ust为正弦波,设计好的带通滤波器恰好在谐振频率点处幅值增益为0db,带通滤波器的传递函数和谐振频率如下:
25、
26、
27、usi为副边感应电压,r1 r2 r3和c1 c2对应图4中模拟电路的电阻和电容,没有特殊名称,s为本领域特殊符号无需解释。
28、采样得到的usi、usr和ust均为正弦波,可以表示为:
29、
30、其中,usi、ust、usr和isi为对应电压瞬时值,vsi、vst、vsr和isi分别为usi、ust、usr和isi的基波分量有效值,为对应电压的相位,参考电压为原边输入电压upi;
31、通过采样电路和滤波电路得到usr和ust的实时值,在保证其为正弦波的前提下,可以根据以下关系,实时得到usi的大小:
32、
33、副边谐振电容电压vst由补偿电容电压vsr,副边线圈电压vl2和副边感应电压vsi构成。
34、usi、ust、usr和isi为对应电压瞬时值
35、原边lcc电路由谐振电感lf1、谐振电容cpt、补偿电容cpr和线圈原边自感l1组成,副边lcc电路由谐振电感lf2、谐振电容cst、补偿电容csr和线圈副边自感l2组成,耦合电感的互感为m。
36、由于在实际运算中远小于usi,忽略其对最终准确度的影响,得到以下公式实现实时跟踪usi:
37、usi=ust-(1-ω2l2csr)usr (11)
38、副边谐振电容电压vst由补偿电容电压vsr,副边线圈电压vl2和副边感应电压vsi构成。
39、usi、ust、usr和isi为对应电压瞬时值
40、原边lcc电路由谐振电感lf1、谐振电容cpt、补偿电容cpr和线圈原边自感l1组成,副边lcc电路由谐振电感lf2、谐振电容cst、补偿电容csr和线圈副边自感l2组成,耦合电感的互感为m。
41、将ust解耦分解出usi,为原边电流通过耦合电感感应得到的电压,包含互感信息,计算usi的基波有效值vsi,得到原边线圈电流有效值ipo,同时,两路电压的采样过程的准确性和快速性,是实现实时跟踪互感的基本条件。
42、进一步地,步骤3的具体过程为:
43、工作在谐振频率85khz,处于谐振状态,副边电路的反射阻抗zre表达式为:
44、
45、zs可以表达为:zs为副边等效电阻
46、
47、由公式(13)可知,zs表达式中(jωlf2+rf2)第一项在谐振条件下是无穷大的,由于副边部分为地下供电部分,可定期对电感和电容测量以修正谐振腔频率,保持副边电路处于谐振状态,所以反射阻抗zre趋近于0,可忽略不计;
48、依据戴维宁等效定理,可求得ipo的表达式如下:
49、
50、
51、
52、原边线圈电流ipo,谐振电感lf1内阻为rf1,线圈自感l1内阻为rl1,谐振电感lf2内阻为rf2,线圈自感l2内阻为rl2,其余为系统电路参数前文已提及。
53、其中,zp和voc分别为戴维宁等效后的等效电阻和等效电压源,zre为副边反射阻抗,在谐振情况下近似为0,zl1为原边线圈阻抗,vpi可由公式(1)通过求得,为满足谐振条件,补偿电感lf1和等效电感lp分别与谐振电容谐振,其大小相同,均用lp代替,所以将公式(16)简化后得到:
54、
55、lp为等效电感;
56、结合公式(5)和公式(17)可得到互感m的表达式:
57、
58、vpi原边方波电压基波有效值,vsi原边方波电压基波有效值;
59、然后,建立关于m的函数:
60、
61、y为建立的新函数;
62、对函数y求取m的偏导发现,在m>0时,始终存在所以可得到互感m的唯一解。
63、本发明由于采用了上述技术方案,具有以下有益效果:
64、本发明对副边电压解耦提取包含互感信息的电压分量,同时对原边进行等效电路推导,最终得到互感的唯一解,此互感识别方法相对误差小于3%,且可以实现在运行过程中实时跟踪互感变化,同时在互感变化的情况下,此方法依旧可以进行稳定地实时跟踪,相比于目前互感识别只停留在系统初始阶段。
- 还没有人留言评论。精彩留言会获得点赞!