一种光伏组件清洁机器人的制作方法
1.本实用新型属于光伏组件清洁领域,具体涉及一种光伏组件清洁机器人。
背景技术:
2.作为光伏发电系统中的核心部分,光伏组件的作用是利用自身的光电转换特性,将太阳能转化为电能,进行储运或供用电负载工作。光伏组件发电量取决于入射到组件内的太阳光能量及组件的光电转换效率,因此组件表面的清洁度是影响组件表面接收光照的一个重要因素,光伏组件在户外使用条件下,常常由于其表面受到沙尘和有机脏污等各种污染物遮挡,导致入射到组件内的太阳光显著下降,严重影响到光伏组件的发电性能。有研究对某分布式光伏电站的组件进行清洁,并对比清洁前后的效果可以发现:清洁后的光伏电站组件日发电量可提升近20%-40%。由此可见,组件的清洁度对发电量的影响至关重要。
3.目前,对光伏组件的清洗方法主要分为人工清洗和机器人清洗两种。人工清洗是利用手动清洗设备或半自动设备进行清洗,主要工作由人力完成;这种清洗方式简单,但耗时耗力,仅仅能够在装机量不大的分布式电站上应用。依靠清洗机器人的自动化清洗方式近年来逐步在大型光伏电站内得到了推广;但现阶段常用的机器人清洗通常会存在毛刷材料选择和机器人清洗方式设计不合理导致清洗力度不够、清洗不干净的情况,且对于不同灰尘污染,机器人无法提供对应的清洗方案。
技术实现要素:
4.本实用新型的目的是克服现有技术中的不足,提供一种光伏组件清洁机器人。
5.这种光伏组件清洁机器人,包括行走机构、横梁支架、驱动单元、运动轨道、驱动滑块和清洁模组;
6.光伏阵列两端的上边框和下边框处分别设置有两组行走机构;行走机构包括限位轮、驱动轮、电机和电机驱动系统;限位轮分别从上边框和下边框的外侧夹住光伏阵列,驱动轮设于光伏阵列上方接触上边框和下边框;驱动轮与电机和电机驱动系统连接;
7.横梁支架横跨光伏阵列,横梁支架两端分别通过端面支撑板和螺栓与行走机构连接,横梁支架下方设有运动轨道,运动轨道内设有驱动单元,驱动单元通过移动滑块连接清洁模组;
8.清洁模组包括旋转电机、压力弹簧、可更换刷头、刷头固定架和腔体下挡板;旋转电机嵌套于移动滑块中,旋转电机和可更换刷头之间设有压力弹簧,可更换刷头外套有刷头固定架;可更换刷头上方设有腔体下挡板,腔体下挡板上设有数个喷口。
9.作为优选:腔体下挡板与刷头固定架形成腔体,腔体内通过腔体分隔板分隔为储水腔和储液腔;蓄水腔顶部设有注水口,蓄液腔顶部设有注液口。
10.作为优选:注水口外接有水管。
11.作为优选:可更换刷头包括圆形刷头和方形刷头,刷头固定架的形状与可更换刷
头匹配。
12.作为优选:存在不同弹性强度的压力弹簧。
13.作为优选:电机驱动系统设有驱动里程计和光耦传感器。
14.本实用新型的有益效果是:
15.1)本实用新型腔体下挡板设有喷口,可向光伏阵列表面喷洒水或清洁剂,提升了光伏阵列的清洗效果;清洁机器人的清洗模块的运行方向与行走机构的运行方向垂直且相互独立,可实现光伏组件表面整体的灰尘清洗,且不受组件排布间隙、高低落差等问题的影响。
16.2)本实用新型针对不同地域、不同类型的积尘,提供多种可更换刷头,且注水口能够外接水管对光伏组件进行冲洗,因此能够以最高效率实现户外组件的深度清洁,具有广泛的应用前景和市场。
附图说明
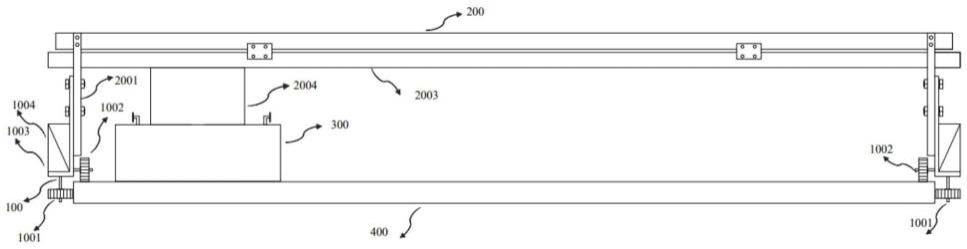
17.图1为本实用新型用于光伏组件阵列高效清洁的机器人主视图;
18.图2为安装方形刷头的用于光伏组件阵列高效清洁的机器人的俯视图;
19.图3为安装圆形刷头的用于光伏组件阵列高效清洁的机器人的俯视图;
20.图4为用于光伏组件阵列高效清洁的机器人的局部断面示意图;
21.图5为两块光伏组件纵排组成光伏阵列、且机器人安装圆形刷头的示意图;
22.图6为四块光伏组件横排组成光伏阵列、且机器人安装方形刷头的示意图。
23.附图标记说明:行走机构100、横梁支架200、清洁模组300、光伏阵列400、限位轮1001、驱动轮1002、电机1003、电机驱动系统1004、上边框4001、下边框4002、端面支撑板2001、驱动单元2002、运动轨道2003、移动滑块2004、旋转电机3001、压力弹簧3002、可更换刷头3003、刷头固定架3004、腔体下挡板3005、注水口3006、注液口3007、储水腔3008、储液腔3009、腔体分隔板3010。
具体实施方式
24.下面结合实施例对本实用新型做进一步描述。下述实施例的说明只是用于帮助理解本实用新型。应当指出,对于本技术领域的普通人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
25.作为一种实施例,如图1至图4所示的一种光伏组件清洁机器人,提供多种可更换刷头和清洗方案,能够以最高效率实现户外组件的深度清洁。光伏组件清洁机器人包括行走机构100、横梁支架200、驱动单元2002、运动轨道2003、驱动滑块2004和清洁模组300;
26.如图1-3所示,光伏阵列400两端的上边框4001和下边框4002处分别设置有两组行走机构100;行走机构100包括限位轮1001、驱动轮1002、电机1003和电机驱动系统1004,用于在光伏阵列400上按设定程序行走;电机驱动系统1004可以准确控制转速并具有闭环控制功能,从而精确控制机器人移动速度,电机类型包含但不限于步进电机、伺服电机等。限位轮1001是从动轮,分别从上边框4001和下边框4002的外侧夹住光伏阵列400,保证行走机构100移动式不会从光伏阵列400两侧脱落。两侧的驱动轮1002设于光伏阵列400上方,分别
与上边框4001和下边框4002接触;驱动轮1002与电机1003和电机驱动系统1004连接;电机驱动系统1004设有驱动里程计和光耦传感器,用于检测机器人在组件阵列上的行走距离和位置信息,记录和判断机器人的运行情况。所述驱动轮1002和限位轮1001均通过柔性连接及传动模组连接,可以保证机器人即使在不平整排列的组件阵列上,也能顺利行走。
27.横梁支架200为轻质钢材质,横跨光伏阵列400,横梁支架200两端分别通过端面支撑板2001和螺栓与行走机构100连接,横梁支架200下方设有运动轨道2003,运动轨道2003内设有驱动单元2002,驱动单元2002通过移动滑块2004连接清洁模组300。驱动单元的传动方式,可以是包括但不限于:齿轮齿条、传送带、蜗轮蜗杆等。横梁支架200的长度与光伏阵列400相匹配,使清洁模组300的运动范围覆盖整个光伏阵列400。
28.清洁模组300包括旋转电机3001、压力弹簧3002、可更换刷头3003、刷头固定架3004和腔体下挡板3005;旋转电机3001嵌套于移动滑块2004中,旋转电机3001和可更换刷头3003之间设有压力弹簧3002,压力弹簧3002可根据需要替换,以提供不同的压力强度。可更换刷头3003外套有刷头固定架3004。
29.如图4所示,可更换刷头3003包括圆形刷头和方形刷头,材质可为尼龙、聚丙烯塑料、海绵、钢丝等。刷头固定架3004的形状同样有圆形和方形,与可更换刷头3003匹配。当可更换刷头3003为圆形刷头,旋转电机3001工作;当当可更换刷头3003为方形刷头,旋转电机3001不工作。
30.可更换刷头3003上方设有腔体下挡板3005,腔体下挡板3005上设有数个喷口,用于向光伏阵列400喷撒水和清洁液。腔体下挡板3005与刷头固定架3004形成腔体,腔体内通过腔体分隔板3010分隔为储水腔3008和储液腔3009;蓄水腔3008顶部设有注水口3006,根据需要注水口3006还可以外接水管用于冲洗工作;蓄液腔3009顶部设有注液口3007。
31.行走机构100与清洗模块300的行走及移动过程有独立的驱动控制系统,将机器人在组件阵列上的移动过程与清洗模块的清洗过程独立,保障清洗过程的高效和稳定。
32.驱动单元2002可以通过光耦信号传感器完成有效行程中的直线往复运动,也可通过手动控制命令前往有效行程中的指定位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1