一种测速准确的食品加工机的制作方法
1.本实用新型涉及食品加工机技术领域,尤其涉及一种测速准确的食品加工机。
背景技术:
2.现有的食品加工机一般包括主机和搅拌杯,主机内设置电机,搅拌杯内设置粉碎刀,电机驱动粉碎刀转动,实现切削、粉碎物料的食品加工目的。为了获得电机的转速,在电机的转轴上加装了磁环,并设置与磁环对应的霍尔元件,电机工作时,磁环旋转,霍尔元件可以在磁环的磁场变化下输出感应信号,食品加工机的控制板根据感应信号获得电机的转速。但是,现有带测速功能的有刷电机一般将霍尔元件放置在一个封闭的支架内,霍尔元件和磁环之间的距离较大,霍尔元件对磁环磁场变化的感应不够灵敏,导致测速误差较大,不利于使控制板合理控制电机的转速,会导致机体对物料的加工效果不理想,不利于提高用户的使用体验。
技术实现要素:
3.为了解决上述现有技术中存在的缺点和不足,本实用新型提供了一种测速准确的食品加工机,通过定位结构使霍尔元件贴近磁环设置,合理缩小霍尔元件与磁环之间的距离,提高霍尔元件在磁环跟随转轴转动时对磁场变化的感应灵敏度。
4.为了实现上述技术目的,本实用新型提供的一种测速准确的食品加工机,包括主机、加工杯及电机,加工杯设有由电机驱动的加工件,电机包括机架、定子组件、包含转轴的转子组件及用于检测转轴转速的测速结构,测速结构包括套设在转轴上的磁环及通过支架设在机架上的霍尔模块,磁环设有间隔分布的n极和s极,霍尔模块包括基板及设于基板上的霍尔元件,所述支架朝向磁环的一侧敞口使霍尔元件面向磁环,支架与基板之间设有用于定位霍尔模块使霍尔元件贴近磁环的定位结构。
5.优选的,所述霍尔元件与磁环之间具有宽度为0.2mm~2mm的间隙。
6.优选的,所述定位结构包括设于支架上且与基板配合的定位安装槽,霍尔模块通过基板与定位安装槽的配合定位设于支架内。
7.优选的,所述支架包括底板、设于底板相对两侧的侧板及设于底板背向磁环一侧的背板,底板、侧板及背板围合形成定位安装槽。
8.优选的,所述霍尔元件垂直设于基板上,侧板相对于底板的凸出高度大于霍尔元件相对于底板的凸出高度。
9.优选的,所述支架设有将霍尔模块罩设于定位安装槽中的盖板。
10.优选的,所述霍尔模块包括连接于基板的引线,支架的背板设有供引线穿过的线槽。
11.优选的,所述定位结构包括设于支架上的定位柱及设于基板上的定位孔,定位柱插设于定位孔中使霍尔模块定位设于支架内。
12.优选的,所述霍尔模块包括与基板垂直设置的定位靠板,霍尔元件设于定位靠板
面向磁环的一侧。
13.优选的,所述霍尔元件与磁环等高设置;和/或,所述支架通过紧固件固定于机架上。
14.采用上述技术方案后,本实用新型具有如下优点:
15.1、本实用新型提供的食品加工机,霍尔模块的基板与支架之间设置定位结构,通过定位结构使霍尔模块稳定的设于支架上,从而使霍尔元件可以尽量贴近磁环设置,合理减小霍尔元件和磁环之间的距离。同时,支架朝向磁环的一侧敞口,使霍尔元件直接面向磁环设置,霍尔元件和磁环之间没有其他遮挡。通过减小霍尔元件和磁环之间的距离及取消霍尔元件和磁环之间的遮挡,可以有效提高霍尔元件在磁环跟随转轴转动时对磁环磁场变化的感应灵敏度,有助于提高机体的测速准确性,使机体的控制模块可以根据霍尔元件反馈的信号准确控制电机的转速,有利于提高机体对物料的加工效果,从而有利于提高用户的使用体验。
16.2、合理设置霍尔元件与磁环之间的间隙宽度,提高霍尔元件对磁环磁场变化感应灵敏度的同时降低相关构件的组装难度。若霍尔元件与磁环之间的间隙宽度小于0.2mm,霍尔元件与磁环之间的间隙宽度过小,对基板和支架之间的组装精度要求及支架和机架之间的组装精度要求都过高,不利于合理降低相关构件的组装难度。若霍尔元件与磁环之间的间隙宽度大于2mm,不利于提高霍尔元件对磁环磁场变化的感应灵敏度,从而不利于提高测速准确性。
17.3、定位结构包括与基板配合的定位安装槽,霍尔模块通过基板与定位安装槽的配合定位设于支架内,合理设置定位结构的具体结构,使霍尔模块的基板能通过定位结构稳定的设于支架内,也使霍尔模块在电机产生振动时仍能通过定位结构相对于支架保持结构稳定。
18.4、支架的底板、侧板和背板围合形成与霍尔模块的基板配合的定位安装槽,合理设置支架的具体结构,形成定位安装槽的同时使支架面向磁环的一侧敞口设置。由于支架的底板、侧板和背板形成一个四面围合的结构,通过支架可以合理降低定子组件中定子绕组的磁场变化对霍尔元件造成的检测干扰,从而有利于提高测速的准确性。
19.5、侧板相对于底板的凸出高度大于霍尔元件相对于底板的凸出高度,支架设置将霍尔模块罩设于定位安装槽中的盖板,提高支架对定子绕组产生的磁场的阻隔效果,有利于进一步合理降低定子绕组的磁场变化对霍尔元件造成的检测干扰。
20.6、定位结构包括相互配合的定位柱和定位孔,支架上的定位柱插设于基板上的定位孔中,使霍尔模块定位设于支架内,合理设置定位结构的具体结构,降低配合难度的同时满足使霍尔元件稳定设于支架内的结构要求。
21.7、霍尔元件设于定位靠板面向磁环的一侧,通过定位靠板提高霍尔元件垂直设在基板上的结构稳定性,使霍尔元件在电机产生振动时仍能相对于基板保持结构稳定,也能保证霍尔元件面向磁环的结构稳定性。
附图说明
22.图1为实施例一食品加工机的整机示意图;
23.图2为实施例一食品加工机中电机的结构图;
24.图3为实施例一食品加工机中电机的俯视图;
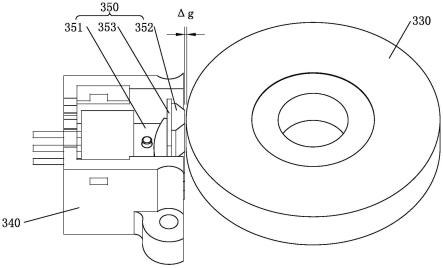
25.图4为实施例一食品加工机中磁环、霍尔模块极支架的配合结构图;
26.图5为实施例一食品加工机中磁环的示意图;
27.图6为实施例一食品加工机中霍尔模块的结构图;
28.图7为实施例一食品加工机中支架的结构图。
29.图中,100-主机,200-加工杯,210-杯体,220-杯盖,230-加热盘,240-杯座组件,250-粉碎刀,300-电机,310-机架,311-中间架体,312-上架体,313-下架体,320-转轴,330-磁环,331-n极,332-s极,340-支架,341-定位安装槽,342-底板,343-侧板,344-背板,345-定位柱,346-线槽,347-凸耳,348-通孔,350-霍尔模块,351-基板,352-霍尔元件,353-定位靠板,354-定位孔,355-引线,360-定子绕组,370-换向器,381-碳刷盒,382-碳刷,390-风扇,410-下传动接头,420-上传动接头,500-控制模块。
具体实施方式
30.下面结合附图和具体实施例对本实用新型作进一步说明。需要理解的是,下述的“上”、“下”、“左”、“右”、“纵向”、“横向”、“内”、“外”、“竖直”、“水平”、“顶”、“底”等指示方位或位置关系的词语仅基于附图所示的方位或位置关系,仅为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置/元件必须具有特定的方位或以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
31.实施例一
32.如图1至图7所示,本实用新型实施例一提供的一种测速准确的食品加工机,包括主机100、加工杯200及电机300,加工杯200设有由电机300驱动的加工件,电机300包括机架310、定子组件、包含转轴320的转子组件及用于检测转轴320转速的测速结构,测速结构包括套设在转轴320上的磁环330及通过支架340设在机架310上的霍尔模块350,磁环330设有间隔分布的n极331和s极332,霍尔模块350包括基板351及设于基板351上的霍尔元件352,支架340朝向磁环330的一侧敞口使霍尔元件352面向磁环330,支架340与基板351之间设有用于定位霍尔模块350使霍尔元件352贴近磁环330的定位结构。
33.通过定位结构使霍尔模块稳定的设于支架上,从而使霍尔元件可以尽量贴近磁环设置,合理减小霍尔元件和磁环之间的距离。同时,支架朝向磁环的一侧敞口,使霍尔元件直接面向磁环设置,霍尔元件和磁环之间没有其他遮挡。通过减小霍尔元件和磁环之间的距离及取消霍尔元件和磁环之间的遮挡,可以有效提高霍尔元件在磁环跟随转轴转动时对磁环磁场变化的感应灵敏度,有助于提高机体的测速准确性,使机体的控制模块可以根据霍尔元件反馈的信号准确控制电机的转速,有利于提高机体对物料的加工效果,从而有利于提高用户的使用体验。
34.结合图1,本实施例中,电机300设于主机100内,转轴320的顶端套设有下传动接头410。加工杯200可拆卸安装于主机100上,加工杯200包括杯体210、用于盖合杯体210的杯盖220、设于杯体210底端的加热盘230及设于杯体210底部的杯座组件240,杯座组件240与杯体210固定在一起,加热盘230被夹紧于杯体210和杯座组件240之间。加工件为通过轴承可转动架设于加热盘230上的粉碎刀250,粉碎刀250包括刀轴及设于刀轴顶端的刀片,刀片位于杯体210中,刀轴的底端向下伸出杯体210并套设有与下传动接头410可拆卸配合的上传
动接头420。加工杯200安装于主机100上时,转轴320与粉碎刀250之间通过下传动接头410和上传动接头420的配合实现传动连接。
35.主机100内设有控制模块500,霍尔模块350电连接于控制模块500。具体的,主机100和加工杯200之间设有电耦合结构,电耦合结构包括设于主机100顶部的下耦合接头和设于加工杯200底部内的上耦合接头,下耦合接头与控制模块500电连接,霍尔元件352与上耦合接头电连接。加工杯200安装于主机100上时,上耦合接头与下耦合接头插接,使霍尔元件352通过电耦合结构电连接于控制模块500,以便控制模块500根据霍尔元件352反馈的感应信号获知转轴320的转速。
36.结合图2、图3,定子组件设于机架310内且位于转轴320的外周,定子组件包括定子绕组360和定子铁芯。本实施例中,机架310包括中间架体311、设于中间架体311顶部的上架体312及设于中间架体311底部的下架体313,磁环330套设于转轴320的上部,支架340固定于上架体312上。结合图5,磁环330设有两个n极331和两个s极332,两个n极331和两个s极332沿磁环330的周向交替分布。转轴320的下部套设有换向器370,下架体313设有两个对称分布的碳刷盒381,碳刷盒381插设有与换向器370接触的碳刷382,碳刷382与换向器370接触改变电流方向,使转轴320能稳定转动。
37.结合图4、图6,本实施例中,基板351水平布置,霍尔元件352竖向布置,即霍尔元件352垂直的设于基板351上。为了提高霍尔元件352的结构稳定性,霍尔模块350还包括与基板351垂直设置的定位靠板353,定位靠板353与霍尔元件352平行设置,霍尔元件352设于定位靠板353面向磁环330的一侧。
38.结合图7,定位结构包括设于支架340上且与基板351配合的定位安装槽341,霍尔模块350通过基板351与定位安装槽341的配合定位设于支架340内。本实施例中,支架340包括底板342、设于底板342左右两侧的侧板343及设于底板342背向磁环330一侧的背板344,底板342、侧板343及背板344围合形成与基板340配合的定位安装槽341,通过定位安装槽341使霍尔模块350受到左右方向上的定位。支架340的底板342、侧板343和背板344形成一个四面围合的结构,通过支架340可以合理降低定子组件中定子绕组360的磁场变化对霍尔元件352造成的检测干扰,从而有利于提高测速的准确性。霍尔模块350包括用于电连接霍尔元件352和上耦合接头的引线355,引线355的一端与基板351连接,支架340的背板344设有供引线355穿过的线槽346。
39.结合图6、图7,定位结构还包括设于支架340上的定位柱345及设于基板351上的定位孔354,定位柱345插设于定位孔354中使霍尔模块350定位设于支架340内。本实施例中,定位柱345自底板342向上凸出且间隔设有两根,相应的,基板351上的定位孔354间隔设有两个且分别与两根定位柱345对应分布,通过定位柱345和定位孔354的配合使霍尔模块350受到前后方向上的定位。
40.支架340通过紧固件固定于机架310上,保证霍尔模块350通过支架340设于机架310上的结构稳定性。本实施例中,支架340通过螺钉固定于上架体312上,支架340的底板342设有向外凸出的凸耳347,凸耳347上设有供螺钉穿过的通孔348,上架体312设有与通孔348对应的固定孔,螺钉穿过凸耳347处的通孔348并拧紧于上架体312的固定孔中,从而将支架340固定于机架310上。
41.结合图4,霍尔元件352与磁环330之间具有宽度很小的间隙,间隙的宽度δg为
0.2mm~2mm。本实施例中,间隙的宽度δg设置为1mm。
42.为了提高侧板343对定子绕组360产生的磁场的阻隔作用,侧板343相对于底板342的凸出高度大于霍尔元件352相对于底板342的凸出高度,使侧板343高于霍尔元件352设置,降低定子绕组360产生的磁场对霍尔元件352造成的检测干扰。
43.为了提高霍尔元件352对磁环330磁场变化的感应灵敏度,霍尔元件352与磁环330等高设置。具体的,霍尔元件352的竖向中心位置和磁环330的竖向中心位置位于同一水平高度上,使霍尔元件352与磁环330等高设置。
44.机体工作时,霍尔元件352电连接于控制模块500,电机300的转轴320驱动粉碎刀250转动对加工杯200内的物料进行切削、粉碎,磁环330跟随转轴320转动。磁环330转动时与霍尔元件352对应的磁极发生变化,霍尔元件352根据磁环330的磁场变化输出感应信号并反馈给控制模块500,控制模块500根据霍尔元件352反馈的感应信号准确获得转轴320的转速,以便更好的控制加工程序的进行。
45.为了降低电机300内部在工作时的温度,电机300还包括套设于转轴320底端的风扇390,主机100内设有排风通道,风扇390设于排风通道内。电机300工作时,转轴320带动风扇390转动,形成自主机100外部流入并流经电机300内部后经排风通道排出主机100的散热气流,利用该散热气流带走主机100内部和电机300内部的热量。
46.可以理解的是,食品加工机的具体结构并不局限于上述记载和附图所示的加工杯可拆卸安装于主机上的结构,加工杯的杯体也可以直接固定在主机内。
47.可以理解的是,主机100和加工杯200之间的电耦合结构可以参考现有技术。
48.可以理解的是,电机300的其他结构可以参考现有技术。
49.可以理解的是,在霍尔元件352的结构稳定性满足要求的前提下,也可以取消定位靠板353的设置。
50.可以理解的是,定位柱345和定位孔354各自的具体数量并不局限于上述记载和附图所示的两个,也可以各设为一个、三个等其他合理的数量。
51.可以理解的是,间隙的宽度δg也可以设置为0.2mm、0.5mm、0.7mm、0.9mm、1.1mm、1.3mm、1.5mm、1.7mm、2mm等其他合理的大小。
52.可以理解的是,霍尔元件352的竖向中心与磁环330的竖向中心也可以上下略微错开设置。
53.可以理解的是,磁环330中n极331与s极332各自的极数并不局限于上述记载和附图所示的两极,也可以各设为4极、6极、8极、10极、12极等其他合理的数量。
54.可以理解的是,支架340可以采用铁质支架或铝质支架等具有磁场屏蔽作用的材料制成,提高支架340对定子绕组360产生的磁场的阻隔效果。
55.可以理解的是,支架340也可以通过其他方式固定于机架310上,如卡扣结构等。
56.可以理解的是,侧板343相对于底板342的凸出高度与霍尔元件352相对于底板342的凸出高度也可以一致设置。
57.实施例二
58.本实施例中,支架340设有将霍尔模块350罩设于定位安装槽341中的盖板,盖板设于支架340的顶侧,盖板与支架340结合形成一个仅面向磁环330一侧开口的罩体结构,通过盖板和支架340的结合进一步降低定子绕组360产生的磁场对霍尔元件352造成的检测干
扰,有利于进一步提高测速的准确性。
59.实施例二的其他结构与实施例一相同,此处不再一一赘述。
60.可以理解的是,盖板可以与支架340一体成型,也可以在霍尔模块350安装完成后再固定于支架340上。
61.除上述优选实施例外,本实用新型还有其他的实施方式,本领域技术人员可以根据本实用新型作出各种改变和变形,只要不脱离本实用新型的精神,均应属于本实用新型权利要求书中所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1