一种基于工况跟随的交流电机轴电流抑制方法与流程
本发明涉及交流电机,具体为一种基于工况跟随的交流电机轴电流抑制方法。
背景技术:
1、鉴于功率半导体开关器件性能的提高,逆变器驱动交流电机以其精确的转矩控制在新能源汽车领域获得了广泛的应用。然而,随着电驱动系统的高压化及新一代功率半导体技术应用,由逆变器供电引起的轴电流对电机轴承造成的电磁损伤问题变得越来严重;针对电驱动系统的统计结果表明,由轴承损坏导致的电机损坏占比约为40%,而轴承损坏的25%是由轴电流引起的,而电机轴电流是由共模电压引起的,会危及电机及电驱动系统的可靠性。为了抑制轴电流,目前常用的策略有:
2、1、消除共模电压:采用“双桥逆变器”,即在原有的三相六个开关上,再加上三相六个开关次序与之相反的开关,以形成两个逆变器分别驱动双绕组电机的两个绕组,用同一驱动信号经过反相去驱动另一逆变器的开关,从而达到消除共模电压的目的,其缺点是硬件系统改造成本过高,同时系统变得过于复杂,可靠性降低。
3、2、消除电机内部耦合:在电机气隙中加入一个法拉第屏蔽线圈,对轴电压和轴承电流的有较好的抑制作用,也可以消除edm电流,但实现比较复杂,还停留在实验室阶段,尚未实用。
4、3、消除或减小轴电压:该方法主要是在轴和地之间提供一条低阻抗的通路,如轴接地电刷,从而将原本可能在轴承上积聚的电荷通过该通路释放掉,这种方法需要定期更换电刷,维修成本高,可靠性差。
5、4、消除减小轴电流:这种方法主要是将轴承绝缘,使得它两端的电压无法在轴承中形成电流,但绝缘轴承的价格要远远大于普通轴承,使得电机的制造成本大大的提高。
6、以上这些方法均基于硬件完成的,普遍存在成本高,开发周期长,可靠性差等问题,难以在新能源汽车领域应用。
技术实现思路
1、本发明的目的在于提供一种基于工况跟随的交流电机轴电流抑制方法,是完全基于软件实现,便于开发和升级,还可以在任意转速和转矩情况下,实现共模电压最小化,从而使得轴电流得到有效抑制,也可以改善系统效率和动态响应特性,将直流母线电压利用率最大化,电机的设计能力可以得到充分应用,还可以避免电压矢量切换期间由功率器件死区补偿产生的瞬态零电压矢量现象。
2、为实现上述目的,本发明提供如下技术方案:一种基于工况跟随的交流电机轴电流抑制方法,包括电机由三相逆变器供电,三相逆变器每个桥臂上功率开关管和下功率开关管的门极控制信号呈互补状态,互补的门极控制信号共有八种组合,每个组合对应于一个定子电压矢量,八个定子电压矢量分别为其中和是零电压矢量,是非零电压矢量,其中,pwm模式的一个pwm周期为ts,分别赋予两个非零电压矢量的时间段为t1和t2,零电压矢量的时间段为t0;其特征在于:包括以下步骤:
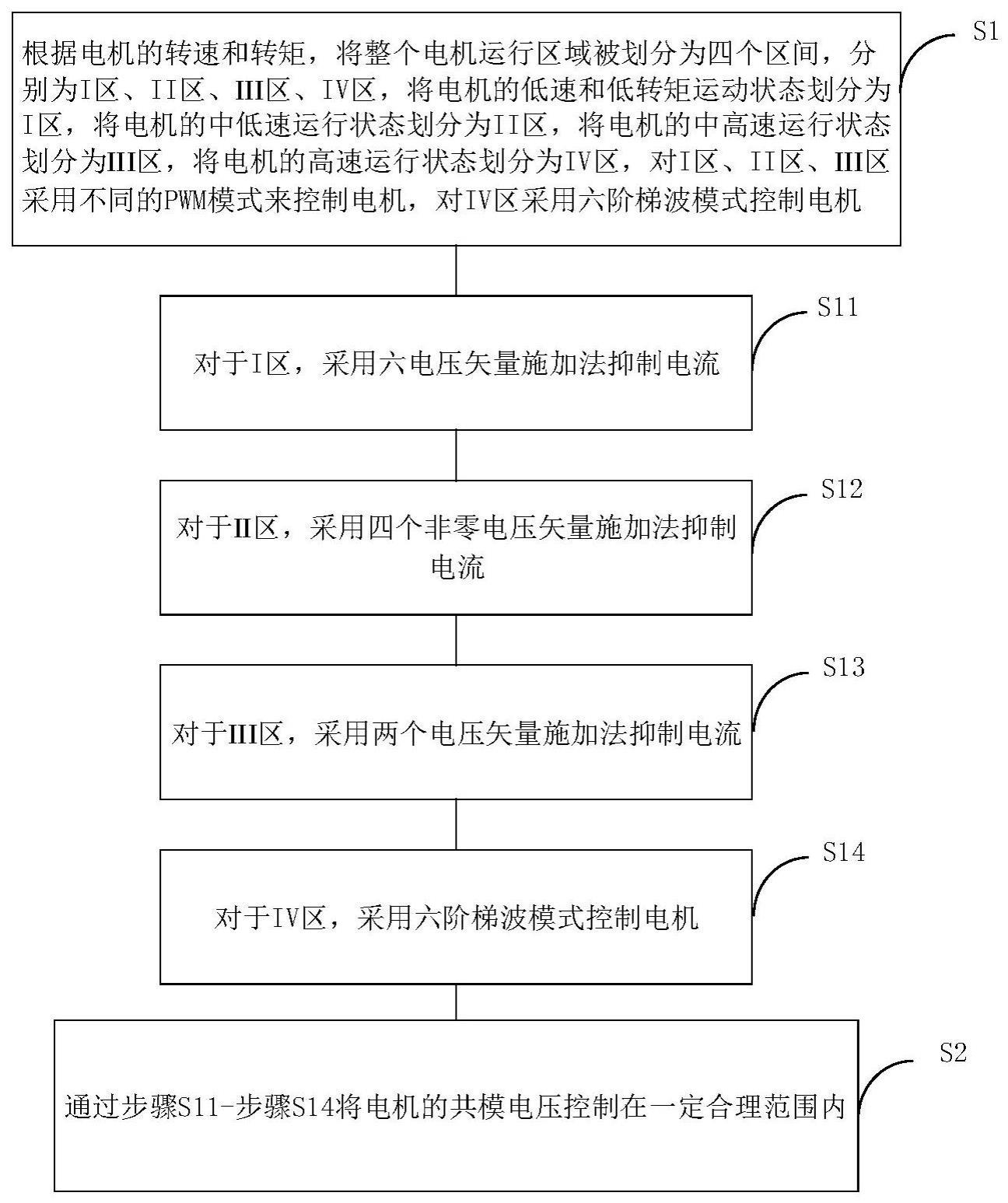
3、步骤s1,根据电机的转速和转矩,将整个电机运行区域被划分为四个区间,分别为ⅰ区、ⅱ区、ⅲ区、ⅳ区,将电机的低速和低转矩运动状态划分为ⅰ区,将电机的中低速运行状态划分为ⅱ区,将电机的中高速运行状态划分为ⅲ区,将电机的高速运行状态划分为ⅳ区,对ⅰ区、ⅱ区、ⅲ区采用不同的pwm模式来控制电机,对ⅳ区采用六阶梯波模式控制电机;
4、步骤s11,对于ⅰ区,采用六电压矢量施加法抑制电流;
5、具体为:在ⅰ区中运行的一个pwm周期ts内,将ts从左到右依次按照进行分割,将所分割的时间段从左到右依次施加的非零电压矢量;
6、步骤s12,对于ⅱ区,采用四个非零电压矢量施加法抑制电流;
7、具体为:在ⅱ区中运行的一个pwm周期ts内,将ts从左到右依次按照进行分割,将所分割的时间段从左到右依次施加的非零电压矢量;
8、步骤s13,对于ⅲ区,采用两个电压矢量施加法抑制电流;
9、具体为:在ⅲ区中运行的一个pwm周期ts内,将ts从左到右依次按照进行分割,将所分割的时间段从左到右依次施加的非零电压矢量;
10、步骤s14,对于ⅳ区,采用六阶梯波模式控制电机;
11、具体为:在ⅳ区中,当电机正方向旋转时,按照的从左到右的顺序依次施加,然后往复循环,其中,每个非零电压矢量的作用时间段tss相同;
12、当电机反方向旋转时,按照的从左到右的顺序依次施加,然后往复循环,其中,每个非零电压矢量的作用时间段tss相同;
13、步骤s2,通过步骤s11-步骤s14将电机的共模电压控制在一定合理范围内。
14、优选的,在步骤s1中,将整个电机运行区域进行划分时,首先,根据整个电机运行过程中的转速和转矩,并以转速为横坐标、转矩为纵坐标,绘制电机转速转矩四象限运行图,然后根据电机的低速和低转矩运动状态、中低速运行状态、中高速运行状态、高速运行状态,将电机转速转矩四象限运行图划分为ⅰ区、ⅱ区、ⅲ区、ⅳ区。
15、优选的,在步骤s11中,电机在ⅰ区内运行时,t0>t1+t2。
16、优选的,在步骤s13中,电机在ⅲ区内运行时,ts=t1+t2。
17、优选的,步骤s14中,每个非零电压矢量的作用时间段tss的计算公式为:
18、其中,nr为电机的转速,p是电机转子极对数。
19、优选的,对于ⅲ区,施加的两个电压矢量为相邻非零电压矢量。
20、优选的,零电压矢量的时间段t0的计算公式为:t0=ts-t1-t2。
21、优选的,ts与t1和t2的计算公式为,
22、其中,代表由电机控制策略产生的参考定子电压矢量。
23、优选的,ts与t1的计算公式为:其中,代表与对应的参考定子电压矢量。
24、优选的,ts与t2的计算公式为:其中,代表与对应的参考定子电压矢量。
25、与现有技术相比,本发明的有益效果是:
26、1.本发明的方法完全基于软件实现,便于开发和升级,并且并未对硬件进行改进,适合于众多机型,且成本低,可以大范围推广使用。
27、2.采用本发明的方法,根据整个电机运行过程中的转速和转矩,并以转速为横坐标、转矩为纵坐标,绘制电机转速转矩四象限运行图,然后根据电机的低速和低转矩运动状态、中低速运行状态、中高速运行状态、高速运行状态,将电机转速转矩四象限运行图划分四个区域,然后针对每个区域的特性施加不同的电机控制方法,使得电机在任意转速和转矩情况下,其产生的共模电压可以最小化,从而使得轴电流得到有效抑制。
28、3.本发明对于ⅰ区,采用六电压矢量施加法抑制电流,可以将电机的共模电压被限制在最小值,由于六个非零电压矢量在前后半个pwm周期内被对称施加,可以进一步优化谐波电流;与此同时,由于电压矢量严格按顺序施加,可以避免电压矢量切换期间由功率器件死区补偿产生的瞬态零电压矢量现象。
29、4.本发明对于ⅱ区,采用四个非零电压矢量施加法抑制电流,将四个相邻有效(非零)电压矢量在前后半个pwm周期内被依次施加,不仅电机的共模电压被控制在最小值,同时也消除了电压矢量切换期间由功率器件死区补偿引起的瞬态零电压矢量现象;另外,pwm前后半个周期的对称性可以优化电机的谐波电流。
30、5、本发明对于ⅲ区,采用两个电压矢量施加法抑制电流,并引入过调制策略,采用在前后半个pwm周期内被对称施加两个相邻的有效(非零)电压矢量,可以使电机共模电压被限制在其最小值,从而可以有效地抑制电机的轴电流。另外,因为相邻的两个有效(非零)电压矢量被采用,它们之间切换时,在功率器件的死区补偿期间不会出现瞬态零电压矢量现象。另外,过调制的引入将提高母线电压的利用率,改善电机的的静态响应特性。
31、6、本发明对于ⅳ区,采用六阶梯波模式控制电机,在六阶梯波控制模式下,由于仅非零电压矢量被应用,电机的共模电压可以最小化,从而在高速运行期间电机的轴电流可以达到有效的控制;与此同时,由于非零电压矢量按规定的顺序施加,能有效避免功率器件死区补偿期间的瞬态零电压矢量现象,从而解决与死区补偿相关的问题;另外,在六阶梯波激励下,电机定子电压的基波分量达到最大值,因此可以最大化母线电压的利用率,使得电机的设计能力得到充分发挥。
32、7.采用本发明的方法,可以将由pwm引起的电机谐波电流在全工况范围内得到有效控制,改善系统效率和动态响应特性;
33、8.采用本发明的方法,提高逆变器功率器件的非线性特性,如死区补偿和导通压降,对轴电流不会产生影响。
34、9.采用本发明的方法,可以使直流母线电压利用率最大化,电机的设计能力可以得到充分应用。
35、10.采用本发明的方法可以降低电机的谐波电流,提高系统性能和效率。
36、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!