一种单逆变器双感应电动机曳引机的控制方法
本发明属于曳引机设计制造领域,涉及一种单逆变器双感应电动机曳引机的控制方法。
背景技术:
1、曳引机的应用十分广泛,按照用途可分为双速客货电梯曳引机、杂货曳引机、无机房曳引机、车辆电梯曳引机等,是拖动装置的动力,通过制动器、减速箱等和待驱动物件连接。在电力拖动相关的工程中,曳引机的身影无处不在,与人们的生活息息相关,是工程活动的重要运输工具,但是曳引机并不总是满载运行,有相当大一部分时间,曳引机是空载或轻载运行,这是对电机驱动器性能的一种浪费,并且传统曳引机普遍为一电机一驱动,在应用时不够灵活,在一些成本受限、需求复杂的场景并不合适,如果曳引机长期低于额定功率运行,不仅浪费电机驱动的性能,承担不必要的成本,还与绿色环保的理念背道而驰。感应电动机又称为异步电机,异步电机不需要稀有金属铸造的永磁体,相较于永磁同步电机,异步电机具有经济耐用、过载能力强和结构工艺简单的优点,随着电力电子和变频技术的发展,适用于宽调速异步电机的调速性能及经济性已经有了巨大提升。
2、目前应用于异步电机的高性能动态控制方法主要有矢量控制和直接转矩控制,其中,三相异步电机的矢量控制技术就是以异步电机的动态数学模型为基础把电机定子上的电流矢量分解成励磁电流矢量和转矩电流矢量,并分别控制其大小和方向,使其合成逆变器可控的有效信号,它实现了交流电机控制的直流化,大大提高了异步电机调速的可靠性和稳定性,并且在变频器效率、容量利用率等方面表现优异,这些特性在曳引机领域非常重要。
3、与传统一电机一驱动曳引机相比,使用矢量控制的单驱动双感应电动机曳引机的制造成本更低、驱动器的工作效率更高并且使用更加灵活,适用于更复杂的现代化工作环境。
技术实现思路
1、本发明的目的是针对现有技术的不足,提供一种单逆变器双感应电动机曳引机的控制方法。
2、曳引机的动力核心是两台并联且参数相同的异步电机,两部电机工作在不同的负载下,负载可以在电机额定功率内自由分配,其单逆变器性能也必须满足两台异步电机同时工作的需求。无刷电机的磁场定向控制(field oriented control,简称foc)技术在工业上已经被广泛应用,在驱动脉冲为正弦波或马鞍波的条件加具有效率高和转矩脉动小的优点,因此本发明的异步电机矢量控制是建立在foc基础上的。
3、本发明的具体步骤如下:
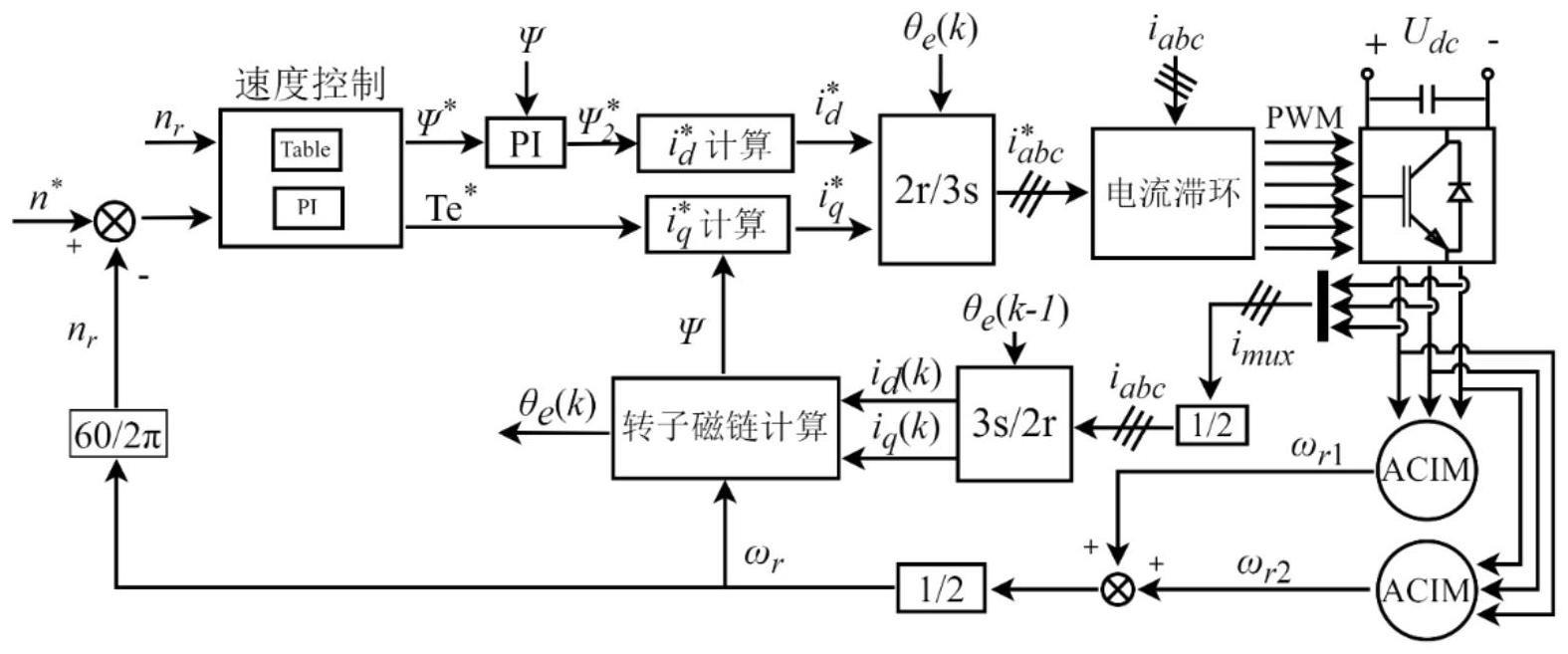
4、步骤1:由于中、大容量电动机启动电流过大会对电网造成冲击,可能影响其他设备的正常运行,所以如果曳引机启动电流过大应当加以限制,同时异步电机启动时磁链和转矩尚未建立起来,难以形成闭环控制,所以在双电机启动之初直接按照预设的电流矢量开环运行,当观测到转子磁链大于阈值时再由矢量控制接管启动闭环控制。
5、步骤2:foc的本质是通过对电机三相电流的解耦得到励磁电流id和转矩电流iq,然后单独对励磁电流和转矩电流进行误差控制实现类似直流电机的控制。这里对k时刻(当前周期)两台异步电机的定子电流进行采样,将定子电流均值作为foc的解耦电流iabc,也就是电机的三相实际电流。
6、步骤3:在foc闭环控制时需要根据电机实时转速进行误差控制,这里将两台异步电机的角速度均值ωr作为反馈速度输入foc,ωr为转子角速度,单位是弧度每秒,参考速度电位是转每分钟,所以需要将转子角速度ωr转换成以转每分为单位的实际电机转速nr,转速计算公式如下:
7、
8、步骤4:将步骤2得到的三相实际电流iabc经过3s/2r坐标变换,得到k时刻的励磁电流id(k)和转矩电流iq(k),其中3s/2r坐标变换是派克park变换和克拉克clark变换复合而来,变换矩阵如下:
9、c3s/2r=c2s/2rc3s/2s (2)
10、式(2)中c3s/2s为clark变换,变换矩阵如下:
11、
12、式(2)中c2s/2r为park变换,变换矩阵如下:
13、
14、式(4)中θe(k-1)表示上一计算周期转子磁链计算得到的电角度,若k为第一个周期,则使用初始值0带入计算。
15、步骤5:根据步骤4坐标变换得到的励磁电流id(k)、转矩电流iq(k)和步骤3的转子角速度ωr计算出转子的电角度θe(k)和转子磁链ψ。计算公式如下:
16、
17、
18、式(5)中p为微分算子,lm为定子励磁电感。tr为转子电磁时间常数,其值为转子自电感lr与转子绕组电阻rr的比值。式(6)中pn为电机极对数。
19、步骤6:将实际电机转速nr和转子磁链对应关系记录为表,索引为实际电机转速nr。电机工作时的目标转速n*预先给定,电机工作时的实际转速nr通过传感器测量结果计算得到,将目标转速n*和实际转速nr进行误差控制得出参考转矩根据nr查表得到对应的参考磁链ψ*,ψ*和步骤5计算的转子磁链ψ输入比例积分pi控制器进行误差控制,计算结果记为
20、步骤7:根据参考转矩和磁链误差控制的输出分别计算出励磁电流id(k)和转矩电流iq(k)的参考电流和计算公式如下:
21、的计算公式:
22、
23、的计算公式:
24、
25、步骤8:将步骤5输出的电角度θe(k)和上一步骤的两相参考电流经过2r/3s变换得到三相参考电流该变换为3s/2r的逆变换,变换矩阵如下:
26、
27、步骤9:将步骤8得到的三相参考电流和步骤2的三相实际电流iabc进行误差控制,输入电流滞环控制器产生六路脉冲输出,输出的脉冲作为逆变器的输入控制功率管的通断从而产生驱动电机运行的电压。
28、本发明的优点在于:将传统单驱动永磁同步电机改为单逆变器双感应电机,两部曳引机单独带载时提高了驱动器的工作效率,同时带载时增加了曳引机使用的灵活性,尤其在轻载和空载场景下,该控制方法可跟随负载调整电机转矩,减少电力损耗,提高曳引机利用率,降低产品成本,易于实现。
技术特征:
1.一种单逆变器双感应电动机曳引机的控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种单逆变器双感应电动机曳引机的控制方法,其特征在于,步骤4中所述3s/2r坐标变换是park变换和clark变换复合,变换矩阵如下:
3.根据权利要求2所述的一种单逆变器双感应电动机曳引机的控制方法,其特征在于,步骤5中转子的电角度θe(k)和转子磁链ψ计算公式如下:
4.根据权利要求3所述的一种单逆变器双感应电动机曳引机的控制方法,其特征在于,步骤7中,励磁电流id(k)和转矩电流iq(k)参考值和计算公式如下:
5.根据权利要求4所述的一种单逆变器双感应电动机曳引机的控制方法,其特征在于,步骤8中,所述2r/3s坐标变换为3s/2r坐标变换的逆变换,变换矩阵如下:
技术总结
本发明公开了一种单逆变器双感应电动机曳引机的控制方法,首先当转子磁链大于阈值时启动闭环控制,并将定子电流均值作为三相实际电流。其次将两台异步电机的角速度均值作为转子角速度,得到实际电机转速;将三相实际电流经过坐标变换,得到励磁电流和转矩电流。然后计算出转子的电角度和转子磁链,并将目标转速和实际转速进行误差控制得出参考转矩,以及对应的参考磁链,进行误差控制。最后分别计算出励磁电流和转矩电流的参考电流,经过坐标变换,得到三相参考电流,与三相实际电流进行误差控制,输入电流滞环控制器,得到驱动电机运行的电压。本发明提高了驱动器的工作效率,增加了曳引机使用的灵活性,减少电力损耗。
技术研发人员:王家军,赵肖飞,辛壮壮
受保护的技术使用者:杭州电子科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!