一种具有安全运行避障功能的封闭母线巡检机器人的制作方法
本发明涉及核电检修机器人,尤其涉及一种具有安全运行避障功能的封闭母线巡检机器人。
背景技术:
1、巡检机器人是一种应用非常广泛的行走设备和各种高尖端精密仪器的承载设备,在社会的各行各业中都能看到它的身影,封闭母线(enclosed busbars或者closedbusbars)是由金属板(钢板或铝板)为保护外壳、导电排、绝缘材料及有关附件组成的母线系统,包括离相封闭母线、共箱(含共相隔相)封闭母线和电缆母线,广泛用于发电厂、变电所、工业和民用电源的引线。由于封闭母线是将各相母线导体分别用支撑绝缘子支撑并封闭于各自的导电金属外壳之中,封闭母线外壳和封闭母线围成的空间受限,高度仅为300mm左右,并且受管道外壳底部支撑绝缘子的阻碍,机器人必须进行越障。
2、现有技术中在巡检机器人进行巡检的过程中存在以下问题:
3、在大修期间,常规的爬行机器人则无法进入封闭母线内部进行检查,存在盲区,导致巡检机器人无法精准的对封闭母线进行巡检;
4、由于母线导体分别用支撑绝缘子支撑并封闭于各自的导电金属外壳之中,因此支撑绝缘子上长时间下会堆积灰尘,巡检机器人受到灰尘的影响无法清晰的拍摄支撑绝缘子的具体视频。
5、针对上述问题,本发明文件提出了一种具有安全运行避障功能的封闭母线巡检机器人。
技术实现思路
1、本发明提供了一种具有安全运行避障功能的封闭母线巡检机器人,解决了现有技术中巡检机器人无法精准的对封闭母线进行巡检,支撑绝缘子上的灰尘的影响机器人的巡检的缺点。
2、本发明提供了如下技术方案:
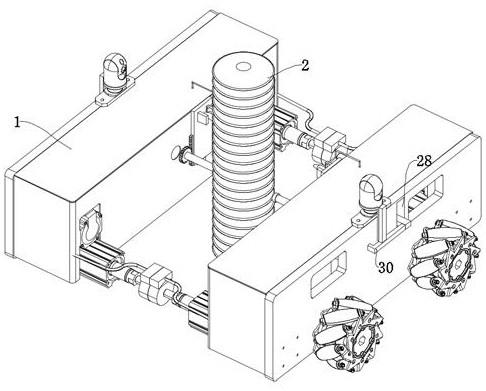
3、一种具有安全运行避障功能的封闭母线巡检机器人,包括:巡检机器人,所述巡检机器人由两个单体组成,两个所述单体的顶部均设有用于对支撑绝缘子进行拍照记录的ai深度相机;
4、所述单体由主架和机罩组成,且机罩固定连接在主架的一侧;
5、避障结构,设置在主架的一侧,用于在进行巡检过程中对障碍物进行避障;
6、除尘结构,设置在机罩的一侧,用于将巡检过程中遇到支撑绝缘子表层堆积的灰尘清除;
7、检查结构,设置在机罩的一侧,用于对支撑绝缘子轻微敲击,便于后期ai深度相机对支撑绝缘子进行拍照记录。
8、在一种可能的设计中,所述避障结构包括固定连接在主架一侧的两个电动缸,两个所述电动缸的输出轴均固定连接有电磁盘,且电磁盘与位于相邻单体上的电磁盘相配合,所述主架的一侧固定连接有高精度减速机,所述高精度减速机的一侧固定连接有伺服电机,所述伺服电机的输出轴延伸至高精度减速机内并与高精度减速机的输入轴固定连接,所述高精度减速机的输出轴转动贯穿主架并固定连接有麦克纳姆轮;封闭母线巡检机器人在巡检运行过程中两个单体之间通过前后电磁盘彼此吸附,从而组成一个整体,该机器人在行走过程中4个伺服电机分别独立驱动4个麦克纳姆轮,从而实现机器人的前进和后退,同时可实现全方向运行,通过电动缸和电磁盘的配合能够有效的避障。
9、在一种可能的设计中,所述除尘结构包括连接在机罩一侧的滑动板,所述机罩内设有第一矩形通孔,所述第一矩形通孔内滑动连接有与滑动板底部固定连接的升降螺母,所述机罩靠近主架的一侧内壁固定连接有承载板,所述承载板的顶部固定连接有驱动电机,所述驱动电机的输出轴固定连接有与机罩顶部内壁转动连接的螺杆,且螺杆的顶端螺纹贯穿升降螺母,所述滑动板远离主架的一侧设有喷头;启动驱动电机带动螺杆和滑动板上下移动,气泵通过喷头向支撑绝缘子喷出气体,喷头能够上下移动将支撑绝缘子上堆积的灰尘吹出,避免堆积的灰尘影响ai深度相机的拍摄。
10、在一种可能的设计中,所述检查结构包括转动连接在单体一侧的齿轮,所述齿轮内螺纹贯穿有滚珠丝杆,所述齿轮的一侧设有相啮合的齿条,且齿条固定连接在滑动板的一侧,所述滚珠丝杆靠近主架的一端延伸至机罩内并固定连接有圆盘,所述圆盘内滑动贯穿有多个限位杆,且限位杆的一端与机罩的一侧内壁固定连接,所述限位杆的外壁套设有与限位杆固定连接的拉簧,且拉簧的另一端与机罩的一侧内壁固定连接;滑动板通过齿条带动齿轮转动,齿轮内的滚珠螺母与滚珠丝杆相配合,带动滚珠丝杆向一侧移动,当齿条与齿轮脱离啮合时,拉簧的拉力带动滚珠丝杆向中间移动,橡胶块轻微敲击支撑绝缘子,如果支撑绝缘子正常时,ai深度相机能够拍摄支撑绝缘子的信息,当支撑绝缘子处于损坏时,橡胶块的敲击能够使支撑绝缘子上的裂痕或破损口更加明显,便于ai深度相机的拍摄。
11、在一种可能的设计中,所述主架的一侧固定连接有垫板,所述垫板的一侧固定连接有气泵,所述气泵的出气口固定套设有第一导气管,且第一导气管的一端与喷头相连通,所述机罩内设有两个圆孔,所述圆孔内固定连接有过滤网,所述机罩靠近主架的一侧固定连接有两个与圆孔相配合的集气罩,所述集气罩与气泵的进气口通过第二导气管相连通;启动气泵,通过喷头向支撑绝缘子吹气进行灰尘清除时,气泵将外界的空气以及空气中灰尘进行吸收,通过过滤网将灰尘过滤,进而在对支撑绝缘子除尘时,还能够清除封闭母线内的灰尘,避免灰尘过多,影响封闭母线的安全性。
12、在一种可能的设计中,所述垫板的一侧固定连接有位于气泵下方的除湿箱,所述除湿箱的顶端设有与气泵进气口相连通的连接管,所述除湿箱内设有多个用于除湿的石灰层,所述除湿箱的一侧设有三通角阀,且三通角阀位于左下方石灰层的下方,第二导气管远离集气罩的一端与三通角阀相连通;在气泵将封闭母线内的灰尘吸附时,能够抽取的空气排入除湿箱中,通过石灰层对空气除湿,避免空气中水分过多影响封闭母线的安全性。
13、在一种可能的设计中,所述齿轮内设有滚珠螺母,齿轮通过滚珠螺母与滚珠丝杆螺纹连接;进而在齿条与齿轮相啮合时,通过滚珠螺母能够使滚珠丝杆向一侧移动,拉簧开始延伸至,当齿条与齿轮脱离啮合时,拉簧的弹力作用下,滚珠丝杆反向移动,对支撑绝缘子进行敲击,便于ai深度相机对支撑绝缘子的拍摄。
14、在一种可能的设计中,所述滚珠丝杆远离主架的一端固定连接有橡胶块,所述主架的一侧固定连接有控制模块,所述控制模块与气泵、驱动电机、伺服电机、电动缸、电磁盘和ai深度相机电连接。
15、在一种可能的设计中,所述主架内设有第二矩形孔,所述第二矩形孔内滑动连接有与螺杆相配合的滑动杆,所述滑动杆的一侧固定连接有l型杆,且l型杆滑动连接在主架的一侧,所述l型杆的顶部固定连接有竖板,所述竖板的一侧设有用于对ai深度相机镜头进行清洁的清洁棉层;在喷头将支撑绝缘子上的灰尘吹散时,灰尘容易附着在ai深度相机上,且螺杆上移时与滑动杆碰触,此时滑动杆带动清洁棉层上移,接着ai深度相机转动数圈,清洁棉层擦拭ai深度相机上的灰尘,避免灰尘阻碍ai深度相机的镜头。
16、在一种可能的设计中,所述滑动板的一侧通过基座固定连接有转轴,且喷头转动套设在转轴的外壁,所述转轴的外壁套设有两个扭簧,两个所述扭簧相互靠近的一端均与喷头固定连接,两个扭簧相互远离的一端均分别与基座固定连接,所述滑动板的一侧设有支管,且支管的顶部与第一导气管相连通,所述支管的外壁固定套设有电磁阀,且电磁阀与控制模块电连接,所述滑动板的一侧通过支板转动连接有扇叶,所述喷头的底部一侧固定连接有与扇叶相配合的凸块;在气泵将风通过第一导气管注入喷头中对支撑绝缘子除尘时,通过控制模块启动电磁阀,通过电磁阀将风引流向下方吹动,驱动扇叶转动,扇叶转动过程中与凸块碰触,能够对转轴往复转动,进而能够最大程度的支撑绝缘子外壁进行除尘。
17、在一种可能的设计中,所述单体的顶部固定安装有六轴机械手,所述ai深度相机安装在六轴机械手的末端。
18、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本发明。
19、本发明中,所述避障结构包括固定连接在主架一侧的两个电动缸,两个所述电动缸的输出轴均固定连接有电磁盘,所述主架的一侧固定连接有高精度减速机,所述高精度减速机的一侧固定连接有伺服电机,所述伺服电机的输出轴延伸至高精度减速机内并与高精度减速机的输入轴固定连接,所述高精度减速机的输出轴转动贯穿主架并固定连接有麦克纳姆轮;巡检机器人在巡检运行过程中两个单体之间通过前后电磁盘彼此吸附,从而组成一个整体,该机器人在行走过程中4个伺服电机分别独立驱动4个麦克纳姆轮,从而实现机器人的前进和后退,同时可实现全方向运行,通过电动缸和电磁盘的配合能够有效的避障;
20、本发明中,所述齿轮内螺纹贯穿有滚珠丝杆,所述齿轮的一侧设有相啮合的齿条,且齿条固定连接在滑动板的一侧,所述滚珠丝杆靠近主架的一端延伸至机罩内并固定连接有圆盘,所述圆盘内滑动贯穿有多个限位杆,且限位杆的一端与机罩的一侧内壁固定连接;滑动板通过齿条带动齿轮转动,齿轮内的滚珠螺母与滚珠丝杆相配合,带动滚珠丝杆向一侧移动,当齿条与齿轮脱离啮合时,拉簧的拉力带动滚珠丝杆向中间移动,橡胶块轻微敲击支撑绝缘子,当支撑绝缘子处于损坏时,橡胶块的敲击能够使支撑绝缘子上的裂痕或破损口更加明显,便于ai深度相机的拍摄;
21、本发明中,所述滑动板内设有两个圆孔,所述圆孔内固定连接有过滤网,所述机罩靠近主架的一侧固定连接有两个集气罩,所述除湿箱与气泵之间通过连接管相连通的,所述除湿箱内设有多个用于除湿的石灰层;通过喷头向支撑绝缘子吹气进行灰尘清除时,气泵将外界的空气以及空气中灰尘进行吸收,通过过滤网将灰尘过滤,进而在对支撑绝缘子除尘时,还能够清除封闭母线内的灰尘,避免灰尘过多,影响封闭母线的安全性,且空气排入除湿箱中,通过石灰层对空气除湿,避免空气中水分过多影响封闭母线的安全性;
22、本发明中,所述第二矩形孔内滑动连接有与螺杆相配合的滑动杆,所述滑动杆的一侧固定连接有l型杆,所述l型杆的顶部固定连接有竖板,所述竖板的一侧设有用于对ai深度相机镜头进行清洁的清洁棉层;在喷头将支撑绝缘子上的灰尘吹散时,灰尘容易附着在ai深度相机上,且螺杆上移时与滑动杆碰触,此时滑动杆带动清洁棉层上移,接着ai深度相机转动数圈,清洁棉层擦拭ai深度相机上的灰尘,避免灰尘阻碍ai深度相机的镜头。
23、本发明中,在巡检机器人巡检遇到绝缘子的时候能够实现精准避开,同时可对封闭母线内部的支撑绝缘子进行视频观测和记录,且移动过程中能够对清除支撑绝缘子表层的灰尘,便于ai深度相机的拍摄,另外除尘时能够将封闭母线内部空气中灰尘与水分清除,保证封闭母线的安全,且滚珠丝杆轻微敲击支撑绝缘子,使得ai深度相机后期能够清晰的观察支撑绝缘子是否损坏。
- 还没有人留言评论。精彩留言会获得点赞!