一种用于双足机器人电源的缓启泄放电路的制作方法
本发明属于电源电路,具体涉及一种用于双足机器人电源的缓启泄放电路。
背景技术:
1、双足机器人是一种类似人类形态的机器人,具有两条腿和身体的其它部分,它们通常用于工业自动化、航空航天和社会服务等领域,具有较高的移动性和灵活性与人类相似的外观;一些双足机器人还拥有类似于人类的面部表情和声音生成能力,这使得他们能够更好地与人类进行交互。
2、双足机器人电机的启动转矩很大,会产生巨大的启动电流,严重情况下会烧坏电池保护板。同时,双足机器人电源在各类工况下功率变化很宽,变化量也很大,供电电池无法提供快速响应和大电流供给,容易造成双足机器人电源失效,导致停机。为了解决直接启动的安全隐患和瞬时功率变化的失效问题,需要在电源前面添加缓启电路。
3、双足机器人停机后,缓启电路中的缓启电容仍旧储存大量电荷,维持较高的电压,若不能即时泄放这些电荷,将可能在维护或者在外力损坏后导致触电等安全事故,故需要设计泄放电路来实现电荷的泄放。
4、目前常用的缓启方式有星三角降压启动、自耦降压启动、电抗启动、变频启动和固态启动等。双足机器人的特定使用条件无法使用星三角降压启动、变频启动和固态启动方式。自耦降压启动和电抗启动的设备体积非常庞大,会大大加重双足机器人的电机负担,数字通信电路常用的mos管启动的带负载能力较小,不适用于双足机器人领域。
5、公开号为cn114915156a的中国专利申请提供了一种时间可调的上电软启动电路,该电路采用一个电阻和一个电容构成rc电路,上电后电容缓慢充电,控制芯片在经历一段时间后使能,电源开启,从而实现了缓启;该方案虽然结构简单,但是仅能控制一个芯片的引脚,使用场景很窄,无法应用于双足机器人电源。公开号为cn115864811a的中国专利申请提供了一种伺服驱动器上电缓启能量泄放电路,包括一个双刀双掷开关、一个控制器和电压检测电路,当电源上电后,控制器通过检测电压控制双刀双掷开关的掷向,来控制缓启和泄放;该技术的控制算法比较复杂,且需要使用控制芯片和电压检测电路,设计难度大,成本较高,不利于双足机器人的产业化应用。
技术实现思路
1、鉴于上述,本发明提供了一种用于双足机器人电源的缓启泄放电路,能够实现缓启和电容电量泄放。
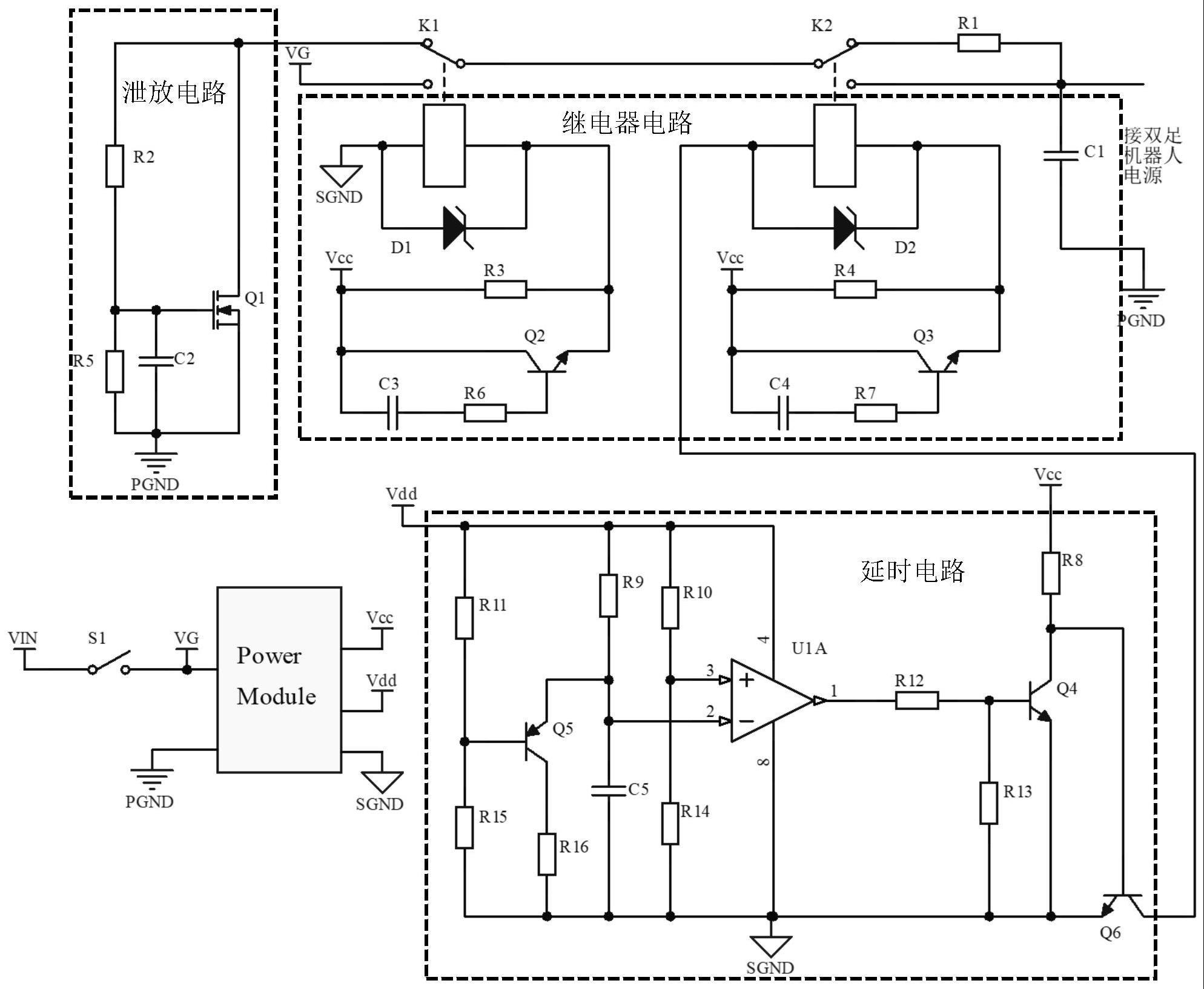
2、一种用于双足机器人电源的缓启泄放电路,包括功率电路、延时电路、继电器电路以及泄放电路,其中:
3、所述功率电路由两个继电开关和缓启电容连接组成,缓启电容的两端连接双足机器人电源;
4、所述延时电路用于为继电器电路提供延时控制信号;
5、所述继电器电路根据延时控制信号控制继电开关的通断,从而使双足机器人电源实现缓启功能;
6、所述泄放电路与功率电路连接,用于在电源开关断开时通过内部电容充电开启泄放回路,使得缓启电容的电量快速泄放。
7、进一步地,所述缓启泄放电路还包括有供电电路,供电电路通过电源开关连接电源电压,进而对其进行电压转换从而为延时电路和继电器电路提供供电电压,并为功率电路提供输入电压。
8、进一步地,所述功率电路包括继电开关k1和k2、电阻r1以及缓启电容c1,其中k1的一端可连接泄放电路或输入电压vg,k1的另一端与k2的一端相连,k2的另一端可与r1的一端或c1的一端相连,c1的另一端接地pgnd,r1的另一端与c1的一端相连;k1对应的继电线圈吸合时,k1的一端接输入电压vg,继电线圈释放时,k1的一端接泄放电路;k2对应的继电线圈吸合时,k2的另一端与c1的一端相连,继电线圈释放时,k2的另一端与r1的一端相连。
9、进一步地,所述延时电路包括9个电阻r8~r16、比较器u1a、电容c5、pnp型的三极管q5、2个npn型的三极管q4和q6,其中r9的一端与r10的一端、r11的一端以及u1a的正电源端相连并接供电电压vdd,r11的另一端与r15的一端以及q5的基极相连,r9的另一端与q5的发射极、c5的一端以及u1a的负输入端相连,r10的另一端与r14的一端以及u1a的正输入端相连,q5的集电极与r16的一端相连,r8的一端接供电电压vcc,u1a的输出端与r12的一端相连,r12的另一端与r13的一端以及q4的基极相连,q4的集电极与r8的另一端以及q6的基极相连,q6的发射极与q4的发射极、r13的另一端、r14的另一端、r15的另一端、r16的另一端、c5的另一端以及u1a的负电源端相连并接地sgnd,q6的集电极向继电器电路输出延时控制信号。
10、进一步地,所述继电器电路包括两个继电线圈l1和l2、两个电容c3和c4、两个npn型的三极管q2和q3、两个续流二极管d1和d2以及四个电阻r3、r4、r6和r7,其中l1的一端与d1的阳极相连并接地sgnd,l1的另一端与d1的阴极、r3的一端以及q2的发射极相连,r3的另一端与q2的集电极以及c3的一端相连并接供电电压vcc,c3的另一端与r6的一端相连,r6的另一端与q2的基极相连,l1对应控制继电开关k1且共同组成第一继电器;l2的一端与d2的阳极相连并接延时控制信号,l2的另一端与d2的阴极、r4的一端以及q3的发射极相连,r4的另一端与q3的集电极以及c4的一端相连并接供电电压vcc,c4的另一端与r7的一端相连,r7的另一端与q3的基极相连,l2对应控制继电开关k2且共同组成第二继电器。
11、进一步地,所述泄放电路包括电容c2、nmos管q1以及两个电阻r2和r5,其中r2的一端与q1的漏极以及功率电路中继电开关k1的一端相连,r2的另一端与r5的一端、c2的一端以及q1的栅极相连,r5的另一端与c2的另一端以及q1的源极相连并接地pgnd。
12、进一步地,当电源开关闭合,三极管q5的基极为高电平使得q5截止,电容c5的放电回路断开,c5通过电阻r9进行充电,此时c5的两端电压小于比较器u1a的转换门限,u1a输出高电平,三极管q4饱和导通,三极管q6的基极为低电平使得q6截止,继电线圈l2失电,衔铁释放,输入电压vg通过电阻r1给缓启电容c1充电,此时整个电路进入缓启状态;经过一段缓启时间后,电容c5两端电压达到比较器u1a的转换门限,u1a发生转换输出低电平,三极管q4截止,三极管q6的基极为高电平使得q6饱和导通,此时继电线圈l2有较大电流通过,衔铁吸合,输入电压vg直接接到缓启电容c1的上端,此时整个电路进入正常工作状态;当电源开关断开,三极管q5的基极为低电平使得q5饱和导通,电容c5的放电回路接入,c5快速通过电阻r16进行放电。
13、进一步地,当电源开关闭合后,供电电压vcc接入,通电瞬间电容c3短路,电流通过电阻r6流入三极管q2的基极使得q2饱和导通,电阻r3相当于被短路,进而使得继电线圈l1直接接入vcc达到动作电压,快速完成衔铁吸合动作;随后,电容c3不断被充电,三极管q2的基极电流越来越小,最终q2的vbe电压小于pn结电压使得q2截止,此时电阻r3完全接入进行分压,使得继电线圈l1电压仅仅大于释放电压,从而减小了吸合稳态下的线圈电流,降低了功耗;当电源开关闭合且经过一段缓启时间后,三极管q6饱和导通,导通瞬间电容c4短路,电流通过电阻r7流入三极管q3的基极使得q3饱和导通,电阻r4相当于被短路,进而使得继电线圈l2直接接入vcc达到动作电压,快速完成衔铁吸合动作;随后,电容c4不断被充电,三极管q3的基极电流越来越小,最终q3的vbe电压小于pn结电压使得q3截止,此时电阻r4完全接入进行分压,使得继电线圈l2电压仅仅大于释放电压,从而减小了吸合稳态下的线圈电流,降低了功耗。
14、进一步地,当电源开关断开,继电线圈l1和l2失电释放衔铁,电阻r1的一端接入泄放电路,电容c2通过电阻r2进行充电,当c2两端电压达到nmos管q1的门限电压时,q1逐渐开启,缓启电容c1的电量通过电阻r1快速泄放,直到电容c2的电压降低到nmos管q1的门限电压以下。
15、基于上述技术方案,本发明具有以下有益技术效果:
16、1.针对双足机器人电源的使用场景,本发明采用电容缓启架构,更好地实现了缓启功能。
17、2.本发明设计的继电器电路功耗很低,节约了能源,简化了散热设计。
18、3.本发明设计了稳定可靠的延时电路,可自由调节延时时间,同时设计了实用的泄放电路来实现电容的电荷泄放,提升了机器人工作的安全可靠性。
19、4.本发明无需使用mcu和控制器,延迟极低,减小了布板面积,去除了编程工作,大大降低了成本。
- 还没有人留言评论。精彩留言会获得点赞!