一种输电线路除障机器人的制作方法
本发明涉及输电线路除障的,特别是涉及一种输电线路除障机器人。
背景技术:
1、输电线路是电力系统的重要组成部分,在亚热带、温带共存的高原季风立体气候共存的地区,由于地形较为复杂,从南亚热带到寒温带兼备,从容造成输电线路在冬季极易覆冰,并且大风天气使地面垃圾漂浮挂在输电线路上的情况也时有发生,对电网顺利运行具有非常严重的影响,现阶段输电线路除冰除异物的方式有很多,主要利用刀片切割或明火燃烧的方式将异物清理,利用敲击破碎的方式将覆冰清理达到除障效果,但这些常用的方法存在、需要停电、损伤输电线路、除冰除异物效率不高的缺点。
2、如现有技术公开号为如授权公告号为cn208078517u的实用新型专利中,该除障机器人其结构包括下机身、前驱动轮、后驱动轮、除冰臂固定头、散热孔、顶盖、动臂、支杆、右除冰轮、除冰刀、左除冰轮、连接机壳、上机壳,散热孔位于除冰臂固定头的后方,后驱动轮包括活塞套、进液管、旋转齿轮、上齿轮、减速器、定子绕组、电线、转子绕组、轴杆、主驱动轮、活塞杆、弹簧、轮壳,活塞套与活塞杆相嵌入。
3、由于该机器人采用除冰轮左右对线路除冰,除冰轮与线路接触后容易对其造成损伤,不利于线路的保护,并且该机器人不便于对线路上其他类型的异物障碍清理去除,增加了使用的局限性。
技术实现思路
1、为解决上述技术问题,本发明提供一种提高除障效率,提高非接触式除障的效果,降低除障过程中对输电线路造成的损伤的输电线路除障机器人。
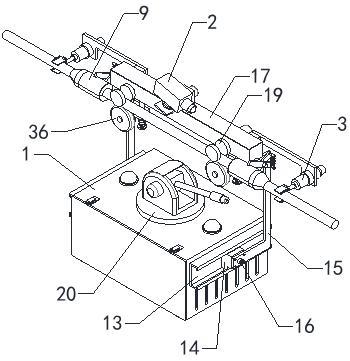
2、本发明的一种输电线路除障机器人,包括行走装置、调节装置、铲除装置、机箱、激光发射器、两组超声波刀柄、两组连接座和四组刀片,机箱通过行走装置的驱动在输电线路上移动,激光发射器通过调节装置安装在行走装置上,两组超声波刀柄分别通过支架安装在行走装置左右两侧,两组连接座分别安装在两组超声波刀柄的输出端上,四组刀片分别安装在两组连接座外侧壁上,四组刀片的端部均设置有锯齿,并且四组刀片之间与输电线路的上下两侧保持间隙,铲除装置设置在行走装置上,铲除装置用于将残留的冰渣二次清理;通过行走装置带动机箱在输电线路上移动,当输电线路上出现覆冰障碍后,通过控制激光发射器开启对输电线路上的覆冰照射,能量沿着激光传输方向迅速传输到冰块的上表面和内部,使冰块温度上升后融化,当沿着光束传播方向的冰块被融化后,通过调节装置带动激光发射器左右摆动照射未融化区域,从而提高融冰效果,随着行走装置不断前进,行走装置带动一侧的两组刀片与覆冰接触,通过将超声波刀柄开启带动两组刀片超声波振动,使两组刀片利用锯齿将输电线路上下两侧的覆冰切除,便于线路两侧附着的冰块受自然重力脱落,提高除障效率,并且通过调节装置带动激光发射器移动照射至不同位置,从而便于对不同种类的异物熔断除障,由于刀片之间与输电线路的上下两侧保持间隙,提高非接触式除障的效果,降低除障过程中对输电线路造成的损伤。
3、优选的,所述铲除装置包括两组支撑轴、四组连接杆、两组拉簧、四组半圆形筒体、四组半圆形铲、四组导热板和四组电热板,两组支撑轴分别安装在行走装置左右两侧,其中两组连接杆中部分别固定安装在两组支撑轴上,另外两组连接杆中部分别旋转安装在两组支撑轴上,两组拉簧的两端分别与相邻的两组连接杆端部连接,四组半圆形筒体分别安装在四组连接杆的另一端,其中每两组半圆形筒体相对设置组成一个圆筒形状,圆筒形状套装在输电线路外部,导热板设置在半圆形筒体内侧壁上,导热板与输电线路之间保持间隙,四组半圆形铲分别设置自在四组半圆形筒体的端部,四组半圆形铲与输电线路表面靠近,四组电热板分别设置在四组导热板内侧壁上;通过两组拉簧带动其中两组连接杆之间对向移动,使组连接杆带动四组半圆形筒体套装在输电线路外部,当行走装置移动时,通过两组半圆形铲将残留在线路表面大块的冰渣、输电线路上附着的积雪和混合淞铲除,同时通过电热板对导热板加热,使导热板对输电线路表面烘烤加热,从而使铲除过后残留在线路表面的冰层融化掉落,避免对线路表面直接刮除过程中造成的损伤,同时提高对积雪、雾凇和混合淞清理除障的效果。
4、优选的,所述行走装置包括驱动装置、按压装置、两组导轨、两组滑块、两组支撑臂、两组顶丝、壳体、两组转轴和两组行走轮,两组导轨分别安装在机箱左右两侧,两组滑块分别滑动安装在两组导轨上,两组顶丝分别配合螺装在两组滑块上,两组支撑臂的下部分别与两组滑块连接,壳体安装在两组支撑臂顶端,壳体内设置有驱动装置,两组拉簧通过驱动装置旋转安装在壳体上,两组行走轮分别安装在两组转轴端部,按压装置设置在壳体下方,按压装置用于与两组行走轮配合将线路辊压;将两组行走轮搭在输电线路上,通过驱动装置带动两组拉簧同步旋转,使两组拉簧带动两组半圆形筒体同步旋转,从而使两组半圆形筒体带动机器人在线路上行进,通过将位于机箱一侧的部件前后镜像安装在两组导轨上,从而便于机器人在两根并列设置的输电线路上行走,并且便于同时对两根输电线路上进行除障作业,提高除障机器人的功能性,减少使用局限性,通过按压装置与两组半圆形筒体配合,提高除障机器人爬带有坡度线路的防滑效果。
5、优选的,还包括电动旋转台、罩体、第一电机、水箱、雾化喷头、液体箱和泵体,电动旋转台安装在机箱顶端,罩体安装在电动旋转台的旋转端上,第一电机安装在罩体外侧壁上,水箱旋转安装在罩体内侧壁上,第一电机输出端与水箱同心连接,雾化喷头通过硬管与水箱连通,液体箱设置在机箱内部,泵体输入端与液体箱内连通,泵体输出端通过软管与水箱连通;当激光发射器对易燃的异物障碍进行熔断清理时,首先通过打开泵体将液体箱内的灭火液体抽取,抽取的灭火液体输送至水箱内部,水箱通过雾化喷头将灭火液体呈雾状喷洒在障碍物表面上,从而当障碍物熔断时对其他位置阻燃,避免熔断产生的火势蔓延,通过电动旋转台和第一电机旋转配合带动雾化喷头移动调节,提高雾化喷头对不同位置异物喷洒灭火液体的灵活性。
6、优选的,所述调节装置包括基座、第二电机、基台、第三电机和转盘,基座安装在壳体外侧壁上,第二电机安装在基座上,基台旋转安装在基座外侧壁上,第二电机输出端与基台同心连接,第三电机安装在基台底部,转盘旋转安装在基台顶部,第三电机输出端与转盘同心连接,激光发射器安装在转盘顶端;通过第二电机和第三电机的配合旋转,从而便于对激光发射器移动调节不同方向的照射位置,提高激光发射器除障的灵活性。
7、优选的,所述按压装置包括两组滑动座、多组导向柱、多组限位板、多组弹簧和两组按压轮,两组滑动座分别上下滑动套装在多组导向柱外侧壁上,多组导向柱均安装在壳体底端,多组限位板分别安装在多组导向柱底端,多组弹簧分别配合套装在多组导向柱外侧壁上,两组按压轮分别旋转安装在两组滑动座外侧壁上;通过多组弹簧推动两组滑动座向上移动,使两组滑动座带动两组按压轮向上移动,从而使两组按压轮与两组行走轮配合将线路上下辊压,提高除障机器人在电路上的防滑和防掉落效果。
8、优选的,还包括摄像头、蓄电池、控制器、无线信息发送器和无线信号接收器,两组摄像头分别安装在机箱顶端左右两部,蓄电池、控制器、无线信息发送器和无线信号接收器均设置在机箱内部;通过两组摄像头对机箱的左右两侧分别拍摄,减少除障过程中的观察死角,两组摄像头将拍摄的图像通过无线信息发送器输送至控制终端,方便人员在控制终端观察输电线路实际情况,采取相应措施,人员操控控制终端发出控制信号,通过无线信号接收器接收控制终端的信号,使无线信号接收器通过控制器控制机器人的动作,从地面即可实现对机器人的远程操作,方便且安全。
9、优选的,所述驱动装置包括两组皮带轮、皮带和第四电机,两组皮带轮分别套装在两组转轴外侧上,皮带套装在两组皮带轮外侧壁上,第四电机安装在壳体外侧壁上,第四电机输出端与其中一组转轴同心连接;通过第四电机带动其中一组转轴旋转,使其中一组转轴通过两组皮带轮和皮带带动另一组转轴旋转,提高两组行走轮旋转的同步效果,提高行走的防滑效果。
10、优选的,还包括风扇和防护网,机箱右端设置有多组进气口,机箱左端设置有开口,风扇安装在机箱开口处,防护网罩装在开口外部;打开风扇对机箱内抽风,使室外空气进入机箱内部流动,空气流动将机箱内部散热降温。
11、优选的,还包括检修门和锁扣,机箱外侧壁设置有检修口,检修门底部通过合页旋转安装在检修口处,锁扣安装在机箱外侧壁上,检修门通过锁扣进行固定;提高机箱内部检修维护操作的便利性。
12、与现有技术相比本发明的有益效果为:通过行走装置带动机箱在输电线路上移动,当输电线路上出现覆冰障碍后,通过控制激光发射器开启对输电线路上的覆冰照射,能量沿着激光传输方向迅速传输到冰块的上表面和内部,使冰块温度上升后融化,当沿着光束传播方向的冰块被融化后,通过调节装置带动激光发射器左右摆动照射未融化区域,从而提高融冰效果,随着行走装置不断前进,行走装置带动一侧的两组刀片与覆冰接触,通过将超声波刀柄开启带动两组刀片超声波振动,使两组刀片利用锯齿将输电线路上下两侧的覆冰切除,便于线路两侧附着的冰块受自然重力脱落,提高除障效率,并且通过调节装置带动激光发射器移动照射至不同位置,从而便于对不同种类的异物熔断除障,由于刀片之间与输电线路的上下两侧保持间隙,提高非接触式除障的效果,降低除障过程中对输电线路造成的损伤。
- 还没有人留言评论。精彩留言会获得点赞!