双稳态介电弹性体发生器及能量收集方法
本公开涉及能量收集,尤其涉及双稳态介电弹性体发生器及能量收集方法。
背景技术:
1、随着微电子技术的迅速发展,使用传统化学电池的微电子设备遇到了供电方面的挑战。这些电池需要定期充电和更换,并且使用寿命有限。为了解决这个问题,一种可能的解决方案是通过环境能量收集技术(eh)为这些电子设备供电。机械振动是另一种可行的能源,因为它无处不在,不依赖于天气、季节和地点。周围环境中最容易接近的振动源通常在超低频范围内。这种振动通常由具有超低固有频率的振动结构产生,例如自行车或汽车车身振动、人体振动、桥梁振动和风力涡轮机振动等。为了将这种振动能量转化为电能,已知的有三种主要转换原理,包括压电(pe)、电磁(em)、静电或摩擦电(te或es)。
2、基于pe效应的振动能量采集器可用来从各种来源收集低频和高频振动,例如建筑物和桥梁振动、人体运动和车辆振动。这些设备的有效工作频率范围通常很宽,但它们通常需要悬臂梁结构才能正常工作,从而限制了它们在尺寸和应用方面的选择。研发出来的具有各种配置的摩擦纳米发生器(teng)可以收集具有宽工作带宽的超低频振动。然而,这些能量采集器的高制造成本和复杂的制造工艺会阻碍它们的广泛应用。基于电磁感应的电磁发生器可用于收集高层建筑和人体运动产生的超低频振荡,但它们的电力是在相对狭窄的超低频范围内产生的。因此,仍需不断探索更合适的替代方案,以提高超低频振动能量收集器的性能。
3、近年来,介电弹性体(de)材料作为新型智能材料,具有变形大、能量密度高、能量转换效率高等优点,有望提升eh性能。基于de的eh技术诞生于2001年,当时pelrine等人提出了第一个de发成器(deg)。随后,多项基于de的能量采集器的相关研究工作已经顺利完成,并取得了一些突破性的研究成果。使用de材料的能量收集器在增强eh性能方面具有显着优势。
4、迄今为止,具有各种结构的deg模型已被设计用于各种应用,包括海洋、风和机械振动环境。然而,能量收集仅在狭窄的超低频范围内表现出出色的eh性能。因此,需要解决能量收集在宽超低频范围内提高eh性能的问题。
技术实现思路
1、提供该公开内容部分以便以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。该公开内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、本公开实施例提供了一种在宽超低频内提高能量收集性能的方法及装置,受双稳态能量采集器的启发,它具有比线性能量采集器更宽的工作带宽,将deg与双稳态特性相结合,可以使得收集具有宽工作频率范围的超低频振动,来提高deg在宽超低频范围内的eh性能的方法。
3、第一方面,本公开实施例提供了一种双稳态介电弹性体发生器(bdeg),其特征在于,包括:一个振动冲击介电弹性体发生器,用于将振动能量转化为电能,所述振动冲击介电弹性体发生器包括圆柱形胶囊,所述圆柱形胶囊包括一个空心圆柱体和两个相同的圆柱框架、一个内部刚性球和两个相同的预拉伸的介电弹性体膜,所述介电弹性体膜夹在所述空圆柱体和所述圆柱框架之间;两个连接器,所述连接器安装于所述振动冲击介电弹性体发生器上;一个外壳;两个预压缩弹性件,所述预压缩弹性件被挤压在所述连接器和所述外壳之间;两个未拉伸的弹性线,所述未拉伸的弹性线安装在两个吊环螺栓的环之间,沿振动冲击介电弹性体发生器的轴连接到所述外壳,每个所述吊环螺栓固定在所述圆柱框架的圆板上。
4、结合第一方面的实施例,在一些实施例中,所述圆柱形胶囊固定连接有滑块,所述滑块滑动连接于所述外壳的滑槽。
5、结合第一方面的实施例,在一些实施例中,所述外壳螺栓连接在振动结构上,所述外壳与所述振动结构同步移动同时所述圆柱形胶囊轴向移动。
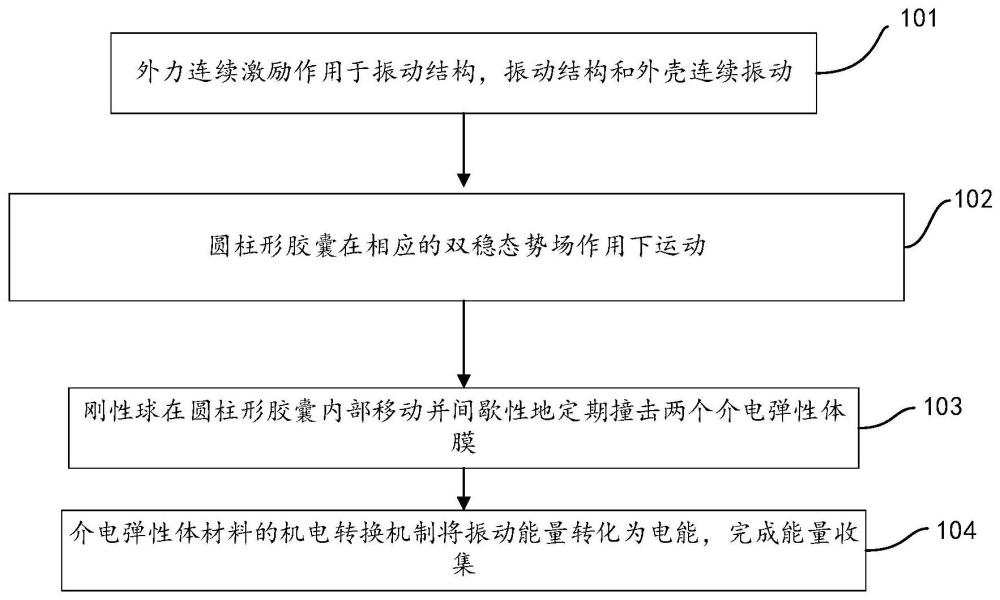
6、第二方面,本公开实施例提供了一种能量收集方法,其特征在于,所述方法包括:
7、外力连续激励作用于振动结构,振动结构和外壳连续振动;圆柱形胶囊在相应的双稳态势场作用下运动;刚性球在圆柱形胶囊内部移动并间歇性地定期撞击两个介电弹性体膜;介电弹性体材料的机电转换机制将振动能量转化为电能,完成能量收集。
8、结合第二方面的实施例,在一些实施例中,施加在所述振动结构上的外部激励为谐波激励f(t)
9、f(t)=a sin(2πf0t)
10、其中a和f0分别表示其幅度和频率。
11、结合第二方面的实施例,在一些实施例中,所述刚性球在两个所述介电弹性体膜之间移动时,系统的动能可以ts计算为:
12、
13、其中tr是刚性杆的动能,计算为:
14、
15、其中,是每个刚性杆的转动惯量,vr和ωr分别是刚性杆相对于振动结构的合成速度和角速度,并且分别是所述振动结构、所述圆柱形胶囊和所述刚性球沿水平方向的速度
16、
17、
18、代入(2)-(4)进入方程式(1)得:
19、
20、以系统坐标原点为势能零位,系统总势能us为:
21、
22、结合第二方面的实施例,在一些实施例中,所述刚性球不撞击所述介电弹性体膜时,系统的瑞利耗散为:
23、
24、所述圆柱形胶囊固定连接有滑块,所述滑块滑动连接于所述外壳的滑槽;
25、其中,c2是所述滑块和所述外壳之间的阻尼系数,c3是所述圆柱形胶囊和所述刚性球之间的阻尼系数。
26、结合第二方面的实施例,在一些实施例中,所述刚性球不撞击所述介电弹性体膜时,由拉格朗日方程可以得到系统的动力学方程为:
27、
28、
29、
30、其中,sign(·)为关于时间的一阶导数,并且分别是振动结构、圆柱形胶囊和球体沿水平方向的速度,和是它们沿水平方向的加速度,mr<<m1和mr<<m2,因此,mr/m1≈0和mr/m2≈0,c2≈0和c3≈0,因此,(8)-(10)可以简化为:
31、
32、在公式(11)中,所述圆柱形胶囊的恢复力fbvi为:
33、
34、通过定义xc=x2-x1所述圆柱形胶囊相对于所述振动结构的相对位移,所述圆柱形胶囊的势能计算为:
35、
36、从公式(13)可以看出所述圆柱形胶囊的潜在功能xc显示具有两个稳定平衡位置的双稳态模式,所述圆柱形胶囊在中间不稳定平衡位置时,轻微的扰动会使所述圆柱形胶囊向左或向右移动,直到预压弹性件的推力和未拉伸弹性线的拉力的轴向分量平衡,即所述圆柱形胶囊在两种稳定平衡位置;
37、其值和相关势能为:
38、
39、通过定义和作为比例因子β=l/x0,α=k2/k3公式(14)可以进一步简化为
40、
41、结合第二方面的实施例,在一些实施例中,所述刚性球撞击所述介电弹性体膜时,系统的运动条件会发生变化,xdeg=x3-x2和定义为所述刚性球相对于所述圆柱形胶囊的相对位移和相对速度,所述刚性球和所述介电弹性体膜之间的冲击是在以下条件下:
42、
43、所述刚性球与所述介电弹性体膜之间的冲击时间极短,使用冲击模型来分析每次冲击后所述圆柱形胶囊和所述刚性球的运动,恢复系数r球和膜之间可以写成:
44、
45、其中和表示所述圆柱形胶囊在每次撞击之前和之后的速度;并表示每次撞击前后球的速度;
46、动量守恒方程可以写成:
47、
48、因此,和可以通过求解方程(17)和(18)得到:
49、
50、其中,所述振动结构的质量、刚度和阻尼系数分别为m1、k1、c1,所述圆柱形胶囊内径为d0,所述刚性球半径为rb,所述圆柱形胶囊质量为m2,所述圆柱形胶囊的质量包括两个连接器和两个圆板的质量,所述刚性球质量为m3,冲击距离,即从球的最边缘到每个所述介电弹性体膜的距离为d,长度为rr的轻质刚性杆的rr质量为mr,两个相同的未拉伸弹性线总刚度,记为弹性件a,是k2,以及两个预压弹性件的总刚度,记为弹性件b,是k3,弹性件b的原始长度x0被压缩到长度l,x轴定义为与水平方向平行的全局坐标系,所述振动结构、所述圆柱形胶囊和所述刚性球沿x轴的坐标为x1、x2和x3,所述振动结构和所述圆柱形胶囊的静态平衡位置(零势能位置)是坐标原点,所述刚性球的坐标原点位于所述圆柱形胶囊的中心点。
51、本公开实施例提供的一种双稳态介电弹性体发生器及能量收集方法,其中双稳态介电弹性体发生器,包括一个振动冲击介电弹性体发生器,用于将振动能量转化为电能,所述振动冲击介电弹性体发生器包括圆柱形胶囊,所述圆柱形胶囊包括一个空心圆柱体和两个相同的圆柱框架、一个内部刚性球和两个相同的预拉伸的介电弹性体膜,所述介电弹性体膜夹在所述空圆柱体和所述圆柱框架之间;两个连接器,所述连接器安装于所述振动冲击介电弹性体发生器上;一个外壳;两个预压缩弹性件,所述预压缩弹性件被挤压在所述连接器和所述外壳之间;两个未拉伸的弹性线,所述未拉伸的弹性线安装在两个吊环螺栓的环之间,沿振动冲击介电弹性体发生器的轴连接到所述外壳,每个所述吊环螺栓固定在所述圆柱框架的圆板上。解决了能量收集在宽超低频范围内提高eh性能的问题,具有比线性能量采集器更宽的工作带宽,将deg与双稳态特性相结合,收集具有宽工作频率范围的超低频振动,来提高deg在宽超低频范围内的eh性能。
- 还没有人留言评论。精彩留言会获得点赞!