一种基于阻尼反馈补偿的永磁同步电机自抗扰速度控制器的制作方法
本发明涉及自抗扰速度控制器,特别涉及一种基于阻尼反馈补偿的永磁同步电机自抗扰速度控制器。
背景技术:
1、永磁同步电机因其高效率、高功率密度等优势在航空航天、工业自动化、新能源汽车等高端领域得到广泛应用。其中,永磁同步电机速度控制受模型误差、负载变动、转矩脉动等多种扰动的影响,如果要实现速度环的高动态响应必须要提高闭环系统的抗扰特性。目前关于提升抗扰特性的优化策略包括扰动观测补偿、输出反馈校正、鲁棒控制、滑模控制、自适应控制等等。自抗扰控制作为扰动观测补偿策略的一种,因其结构简单、对模型依赖度较小、形式多变等优势在永磁同步电机速度控制中得到广泛地研究。
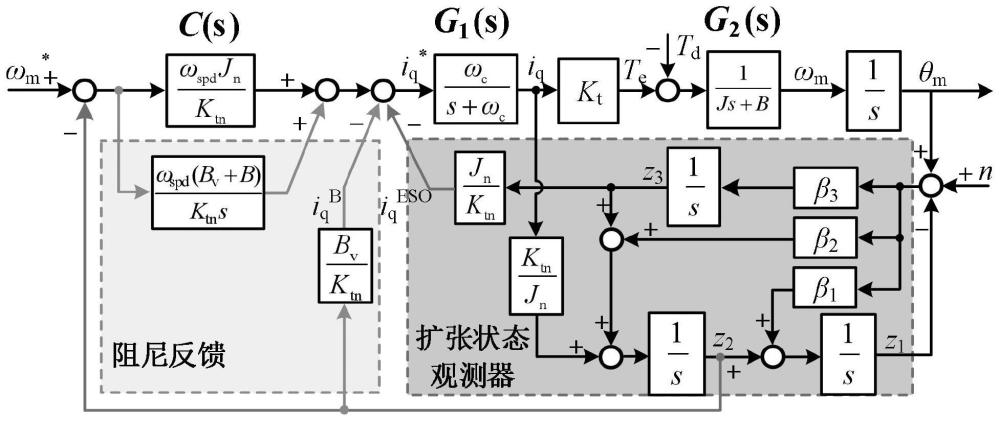
2、传统的自抗扰速度控制器结构如图1所示,其中,c(s)是误差反馈控制器,g1(s)是内环等效传函,g2(s)是被控对象等效传函,td是外部扰动,是速度参考,是电流参考。根据电机位置θm和被控对象模型,扩张状态观测可以实时估计电机状态和外部扰动,同时将估计速度z2反馈至速度参考侧进行闭环调节,将估计扰动z3折算为电流补偿值前馈至电流参考侧提升抗扰动态。
3、扩张状态观测器对扰动的观测和补偿机理有利于提升系统的抗扰能力。扩张状态观测器增益越大,系统抗扰能力越强。然而,观测器增益过大也会降低系统的抑噪能力。当观测器增益受限时,控制器对扰动估计值的收敛速率较慢,以至于负载突变时因响应不及时导致速度变动较大。
技术实现思路
1、为了解决上述问题,本发明提供了一种基于阻尼反馈补偿的永磁同步电机自抗扰速度控制器,可以在不牺牲系统抑噪特性的基础上,进一步提升了速度环的抗扰能力。
2、为此,本发明的技术方案是:一种基于阻尼反馈补偿的永磁同步电机自抗扰速度控制器,包括转速误差计算单元、转速误差调节器、阻尼反馈模块、三阶扩张状态观测器和q轴参考电流计算模块;
3、所述阻尼反馈模块包括转速误差积分调节器和阻尼电流反馈单元,转速误差积分调节器与转速误差调节器并联,输入端均连接转速误差计算单元,输出端均连接至q轴参考电流计算模块的输入端;
4、所述阻尼电流反馈单元的输入端连接三阶扩张状态观测器的第一输出端,阻尼电流反馈单元的输出端、三阶扩张状态观测器的第二输出端连接至q轴参考电流计算模块的输入端。
5、在上述方案的基础上并作为上述方案的优选方案:所述三阶扩张状态观测器的输入端与含有量化噪声n的位置采集信号θm相连,三阶扩张状态观测器的第一输出端输出电机转速估计变量与转速误差计算单元、阻尼电流反馈单元的输入端相连,三阶扩张状态观测器的第二输出端输出负载转矩补偿电流与q轴参考电流计算模块的输入端相连。
6、在上述方案的基础上并作为上述方案的优选方案:所述转速误差积分调节器的输入端接入转速误差计算单元输出的转速给定值和三阶扩张状态观测器输出的电机转速估计变量则转速误差积分调节器的输出值的计算如下:
7、2.1)计算当前时刻转速跟踪误差spd_e(k)的计算公式为:
8、
9、2.2)计算误差积分调节器的积分系数:
10、
11、其中,ki是误差积分调节器调节器的积分系数,
12、b是电机的摩擦系数,
13、bv是阻尼系数,
14、ktn是永磁同步电机转矩系数标称值;
15、2.3)计算转速误差积分调节器的输出值spd_i_out(k):
16、spd_i_out(k)=ki*spd_e(k)*ts+spd_i_out(k-1)
17、其中:ts是控制周期;
18、spd_i_out(k-1)是上一时刻积分调节器输出值。
19、在上述方案的基础上并作为上述方案的优选方案:阻尼反馈模块的输入端接入三阶扩张状态观测器输出的电机转速估计变量则阻尼反馈模块中阻尼反馈电流iqb的计算公式为:
20、
21、在上述方案的基础上并作为上述方案的优选方案:所述转速误差调节器的输入端接入转速误差计算单元输出的转速给定值和三阶扩张状态观测器输出的电机转速估计变量则转速误差调节器的输出值的计算如下:
22、3.1)计算当前时刻转速跟踪误差spd_e(k)的计算公式为:
23、
24、3.2)转速误差调节器采用比例调节器,调节器的比例系数设定为:
25、
26、其中,kp是误差比例调节器的比例系数,ωspd是转速环期望带宽;
27、3.3)计算转速误差调节器的输出值spd_p_out(k):
28、spd_p_out(k)=kp*spd_e(k)。
29、在上述方案的基础上并作为上述方案的优选方案:所述三阶扩张状态观测器包括实时位置估计单元、实时转速估计单元和实时扰动估计单元,状态变量分别为电机的位置估计变量、转速估计变量和扰动估计变量。
30、在上述方案的基础上并作为上述方案的优选方案:所述三阶扩张状态观测器根据当前最新的位置反馈及采样电流,计算得到电机转速估计变量和负载转矩补偿电流具体包括如下步骤:
31、1.1)采集永磁同步电机轴端安装编码器的数字脉冲m,将其换算为电机当前周期弧度制的角度值,电机角度值θm的计算公式为:
32、
33、其中,ppr是每个机械周期电机编码器的脉冲数;
34、1.2)定义并初始化三阶扩张状态观测器的状态变量,分别为电机的位置估计变量z1、转速估计变量z2和扰动估计变量z3;其中转速估计变量z2=转速
35、1.3)计算位置估计偏差e(k),其公式如下:
36、e(k)=θm(k)-z1(k-1)
37、其中,z1(k-1)是上一周期位置估计值;
38、1.4)计算当前周期的位置估计值z1(k)、转速估计值z2(k)和扰动估计值z3(k),其迭代公式为:
39、
40、其中,ts是控制周期;
41、z2(k-1)是上一周期转速估计值,
42、z3(k-1)是上一周期扰动估计值,
43、β1是三阶扩张状态观测器第一增益,
44、β2是三阶扩张状态观测器的第二增益,
45、β3是三阶扩张状态观测器的第三增益,
46、ktn是永磁同步电机转矩系数标称值,
47、jn是永磁同步电机转子惯量和负载惯量总和的标称值,
48、iq(k)是当前周期永磁同步电机的q轴电流;
49、1.5)根据步骤1.4)所得的扰动估计值z3,计算负载转矩补偿电流其计算公式为:
50、
51、在上述方案的基础上并作为上述方案的优选方案:所述q轴参考电流计算模块包括q轴初始参考电流计算单元和q轴参考电流限幅单元;计算过程如下:
52、4.1)根据转速误差调节器的输出值spd_p_out、误差积分调节器的输出值spd_i_out、三阶扩张状态观测器的负载转矩补偿电流以及阻尼反馈电流值iqb,计算得到q轴初始参考电流如下:
53、
54、4.2)对q轴初始参考电流限定幅值,得到q轴电流参考值,限幅公式如下:
55、
56、其中,是q轴电流的限幅值,是限幅后的电流参考值。
57、与现有技术相比,本发明的有益效果是:
58、1、抑制不确定性扰动的能力增强,在保证相近的抑噪特性下,本发明具有比传统自抗扰控制器更优的抗扰能力,扰动抑制速率更快,负载突变造成的转速动态变化减小,恢复时间缩短;
59、2、结构简单灵活,保留传统自抗扰控制器的结构,不会增加观测器的复杂性;而当阻尼系数bv为零,本发明与传统自抗扰控制器具有等效性;当阻尼系数bv大于零,阻尼反馈模块会进一步加快速度响应;
60、3、调参方便,阻尼系数与速度环期望带宽、观测器增益可以分离设计,在不改变速度环期望带宽和观测器增益的条件下,调节阻尼系数大小就可以调节抗扰能力。
- 还没有人留言评论。精彩留言会获得点赞!