一种巡检机器人充电装置及充电方法与流程
本发明涉及机器人充电,具体涉及一种巡检机器人充电装置及充电方法。
背景技术:
1、在工业化生产中,通常会使用到巡检机器人来配合生产安全工作使用;
2、例如在某些存在有害气体的工作场所中,工作人员在日常进行巡检时,往往需要佩戴防毒面具以及做好其他安全防护工作,从而防止有害气体对人体的侵害,此时可使用巡检机器人来实现日常的巡检,不需要人员进入,降低风险;且目前的巡检机器人通常配置有气体监测装置,可实时监测场所内部的气体浓度含量,当气体浓度过高时,可进行报警,使得工作人员可根据报警快速做出反应;
3、在生产安全中,对于生产环境中的物资堆放要求较高,目前生产自动化程度较高,物资在跨车间运输时通常采用自动行驶小车,自动行驶小车会按照铺设的轨道进行行驶,但当轨道上出现物体时,则会影响自动行驶小车的正常工作,此时可配合巡检机器人进行使用,通过巡检机器人来对轨道、消防通道以及其他不可堆放物体的区域进行巡检,发现后可及时报警来通知工作人员;
4、在实际使用时,巡检机器人的供电方式采用蓄电池供电,即需要定时进行充电工作,目前的巡检机器人在进行充电时需要充电基座的配合来进行,即将充电基座固定在某一位置后通电,当巡检机器人电量不足时,巡检机器人移动至该充电基座位置处进行充电工作;
5、巡检机器人的电量消耗主要由驱动消耗、视频监控消耗、气体监测消耗、其他元件消耗组成,由于巡检机器人自身的重量较大,因此驱动消耗占比较高,驱动消耗占比可达70%以上,因此巡检机器人在移动时的驱动消耗对于巡检机器人的工作范围影响较大;
6、受驱动消耗的影响,固定充电位置对于巡检机器人的实际使用存在较大影响,例如巡检机器人单次可行驶距离在4公里,那么为了保证巡检机器人可复位进行充电,那么巡检机器人的工作半径不得超过2公里,极大的缩短了巡检机器人的工作半径,不便于实际使用。
7、因此,需要一种巡检机器人充电装置及充电方法,以克服上述问题的发生。
技术实现思路
1、为了解决上述问题,本发明提供了一种巡检机器人充电装置及充电方法,实现了解决背景技术中所提出问题的目的。
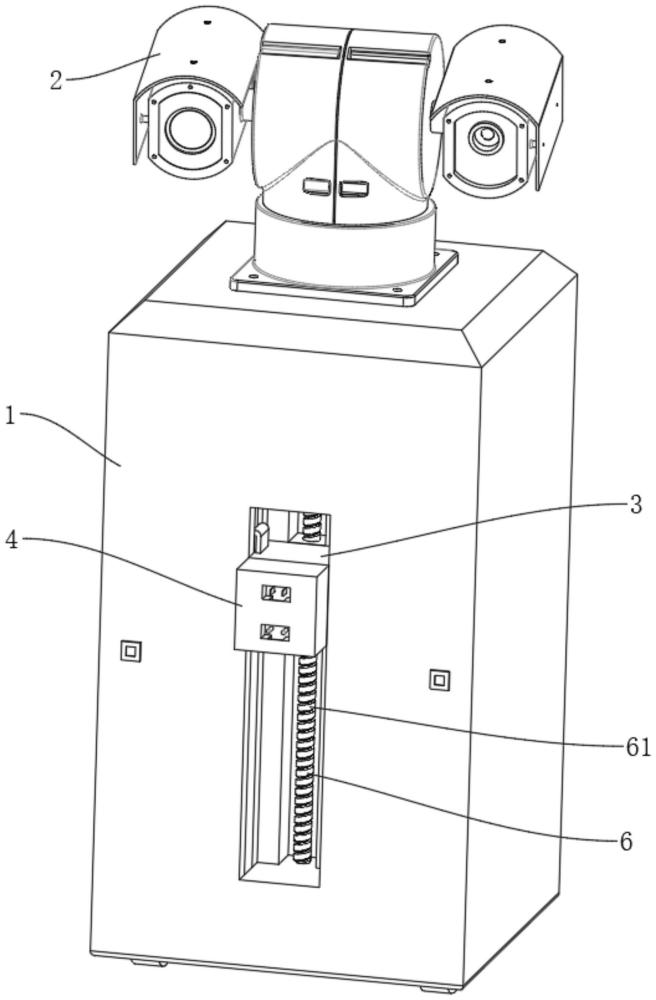
2、本发明为了实现上述目的,具体采用以下技术方案:一种巡检机器人充电装置,包括设置在机器人主体上的图像识别装置,所述机器人主体上设置有可上下滑动的基座,所述基座的一侧转动设置有用于连接插座的充电座,所述充电座和机器人主体内部的蓄电池通过导线电连接;所述充电座包括转动设置在基座内部的外壳、滑动设置在外壳内部的滑块一、设置在滑块一内部用于插入插座中的两个片状端子、设置在外壳内部用于推动滑块一移动的电动推杆一;所述充电座还包括滑动设置在外壳内部的滑块二、设置在滑块二内部用于插入插座中的两个柱状端子、设置在外壳内部用于推动滑块二移动的电动推杆二;所述基座的内部安装有电机一,所述电机一的输出端与外壳固定连接。
3、作为上述技术方案的进一步改进:
4、所述片状端子转动设置在滑块一的内部,两个所述片状端子的一端共同固定连接有连接块,所述连接块和滑块一之间设置有电动推杆三,所述电动推杆三的两端分别铰接设置在连接块的一侧和滑块一的一侧。
5、所述柱状端子包括固定连接在滑块二内部的端子座、转动设置在滑块二内部且转动设置在端子座内部的端子头;两个所述端子头上均固定连接有同步轮一,所述滑块二上安装有电机二,所述电机二的输出端固定连接有同步轮二,所述同步轮二和两个同步轮一之间通过同步带相连接。
6、所述基座通过驱动组件上下滑动设置在机器人主体上;所述驱动组件包括转动设置在机器人主体上的丝杆、螺纹连接在丝杆外部且滑动设置在机器人主体上的滑动块;其中,所述滑动块与基座固定连接。
7、所述基座的一侧固定连接有内嵌块,所述外壳的一侧固定连接有凸出块,所述凸出块转动设置在内嵌块的内部;所述内嵌块和凸出块上有用于将凸出块的转动角度限制在180°的限位组件。
8、所述限位组件包括固定连接在凸出块外部的限位块、开设在内嵌块上的限位槽;所述限位块滑动设置在限位槽的内部。
9、所述滑块一的两侧和滑块二的两侧均设置有滑轮。
10、所述充电座的面板尺寸和插座的面板尺寸相同。
11、一种巡检机器人充电方法,包括以下步骤:
12、s1、当机器人主体内部蓄电池电量较低时,机器人主体就近移动至插座位置;
13、s2、机器人主体到达插座位置后,通过图像识别装置来定位插座;
14、s3、将插座定位后,通过驱动组件来调节改变充电座的高度,使得充电座的高度与插座高度保持一致;
15、s4、高度调节一致后,通过图像识别装置确定插座种类,从而根据插座种类来判断是否需要通过电机一来驱动充电座进行转动换向;若不需要进行转动换向,则依序进行s5、s6;若需要进行转动换向,则依序进行s5、s7;
16、s5、机器人主体靠近插座进行移动,同时调节充电座与插座之间的相对位置,使得充电座的中心线与插座之间的中心线重合,最终使得充电座贴合在插座上;
17、s6、电动推杆一启动后推动滑块一进行移动,使得片状端子插入插座中实现通电,开始进行充电工作;
18、s7、电动推杆二启动后推动滑块二进行移动,使得柱状端子插入插座中实现通电,开始进行充电工作。
19、作为上述技术方案的进一步改进:
20、在步骤s6中,片状端子在插入插座中时,电动推杆三进行往复的伸缩工作,带动片状端子的一端进行上下移动,将插座内部的保护门顶开后,片状端子完全插入插座中;在步骤s7中,柱状端子在插入插座中时,电机二进行动作,通过同步轮二和同步带来带动同步轮一进行转动,即带动端子头进行转动,将插座内部的保护门顶开后,柱状端子完全插入插座中。
21、本发明的有益效果为:
22、首先将厂区内部设置墙壁插座的位置输入机器人主体的主机中,当机器人主体内部的蓄电池电量不足时,机器人主体根据自身位置来就近寻找插座,达到插座区域后,通过图像识别装置来对定位插座位置,随后调节基座的水平高度,使得充电座和插座高度一致,同时通过图像识别装置来判断插座的种类,根据插座的种类来判断是否需要通过电机一来带动充电座进行翻转,随后机器人主体靠近插座进行移动,使得充电座和插座贴合;通过电动推杆一推动片状端子插入插座中实现通电或通过电动推杆二推动柱状端子插入插座中实现通电,从而开始充电工作;即本技术中的巡检机器人不需要通过固定设置的充电基座进行充电,可直接通过插座进行充电工作,墙壁插座在厂区中设置较多,因此巡检机器人的充电位置较为灵活,相对于传统的固定充电基座进行充电的方式,本技术可极大的扩大巡检机器人的工作范围,便于实际使用;
23、由于目前的插座上多设置有保护门,保护门的作用可防止单极插入插座中,同时可防止水飞溅至内部导电片上,保护门通常通过弹簧弹性滑动设置在插座的内部,电动推杆一推动滑块一使得片状端子插入插座中时,片状端子首先需要将保护门顶开后才可插入插座中,保护门的顶部为斜槽,片状端子在插入插座时,片状端子对保护门造成挤压,从而将保护门顶开,即片状端子插入插座所需要的力较大,不便于插入,因此本技术在片状端子插入插座中时通过电动推杆三进行往复的伸缩运动,从而带动片状端子的一端进行上下移动,从而便于将保护门顶开;
24、电动推杆二推动滑块二插入插座中时,电机二带动同步轮二进行转动,从而通过同步带来带动同步轮进行转动,继而带动端子头进行转动,即端子头在插入插座中时保持转动,其在与保护门顶部的斜槽接触后,转动的端子头和保护门顶部斜槽之间为滚动摩擦,摩擦力较小,从而便于将保护门顶开。
- 还没有人留言评论。精彩留言会获得点赞!